
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
401 - 420 / 1,457
自動車用レーダーのためのデュアルバンドアンテナアレイおよびRFフロントエンド
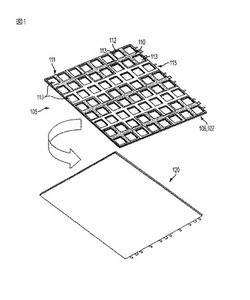
【課題】デュアルバンドアンテナアレイと長距離狭帯域レーダーおよび短距離超広域レーダーを結合するRFフロントエンドとを有する低コストの3次元集積自動車用レーダーを提供する。
【解決手段】自動車用レーダーは、上面と底面を有する印刷回路基板と、印刷回路基板の底面にマウントされたプロセッサとを含む。自動車用レーダーはさらに、印刷回路基板の上面に形成された第2の液晶ポリマー層と、パッチを有しかつこの第2の液晶ポリマー層上に印刷された第2のマイクロストリップアレイと、第2の液晶ポリマー層上に形成された第1の液晶ポリマー層と、有孔パッチを有しかつ第1の液晶ポリマー層上に印刷された孔第1のマイクロストリップアレイと、さらに、第2の液晶ポリマー層の底面に接続され第1のマイクロストリップアレイに第1の周波数の信号を第2のマイクロストリップアレイに第2の周波数の信号を送信する送信/受信モジュールとを含む。
(もっと読む)
アクティブフェーズドアレイレーダ

【課題】空中線モジュールにおける出力の制約を解消してより高い電力の出力を可能にすることで、状況に応じてより有効なアンテナビームを形成できるアクティブフェーズドアレイレーダを提供する。
【解決手段】空中線モジュール20において送信用可変減衰器6aを電力増幅器7の入力側に配置することで出力の制約を解消しより高い電力の出力を可能にし、制御装置8が、各空中線モジュール20の電力増幅器7、可変減衰器6a,6bおよび回路切換え機構2〜4を制御してアンテナ開口面での波源分布特性を、送信時には均一分布特性又は密度テーパ分布特性に切換え、受信時には均一分布特性又は振幅テーパ分布特性に切換える。
(もっと読む)
障害物検出装置
【課題】車両のような移動物体が対向移動物体や固定物体との間での相対速度がゼロでも、対向物体の過度の接近を容易に判定出来る障害物検知装置を提供する。
【解決手段】移動物体Cに対して相対的に移動可能に支持されると共に対向物体Dに向けて送信波を発射し対向物体Dからの反射波を受信する動体検出手段1と、送信波及び反射波の周波数ずれに基づく出力信号に応じて対向物体Dの有無を判定する物体判定手段2と、動体検出手段1を対向物体Dに対して継続して接離移動すると共に移動物体Cに支持されるセンサ位置可変駆動手段3と、動体検出手段1が移動物体Cが所定の駆動域Edにあると見做すと動体検出手段1を所定移動範囲B1で往復動させるようセンサ位置可変駆動手段3を駆動する制御手段4と、を備えたことを特徴とする。
(もっと読む)
レーダセンサ上の接続プラグおよびその製造方法
【課題】従来技術の問題点を解決したレーダセンサ上の接続プラグ、およびその製造方法を提供する。
【解決手段】プラグピンがプラスチック内に挿入された、レーダセンサ上の接続プラグであって、プラグピン(4)を取り囲むプラスチック(5)(11)の電気インピーダンスが低周波数域で高い値を有し、プラスチック(6)が、高周波数レーダ波の帯域のレーダ波を吸収する特性を有するように、プラスチック(5)(6)(11)が、レーダ波を吸収する顆粒を少なくとも部分的に備えている接続プラグを提案する。このために、プラグピン(4)を、レーダ波吸収顆粒を備えていないプラスチック層(5)(11)によって取り囲み、プラグピン(4)を取り囲む残りの部分を、レーダ波を吸収する顆粒を含むプラスチック(6)からなるものとする。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でターゲットを一旦ミスペアリングした場合に、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 今回ペアリング候補選定手段S9は、今回相対関係および前回相対関係が同一の物体に基づくものか否かを判定し、同一の物体に基づくものと判定された場合に、今回相対関係の算出および前回相対関係の算出に用いられたペアリング候補を正しいペアリング組み合わせとして確定する。ペアリングフィードバック処理手段S10は、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、組み合わせが確定していないペアリング候補に基づいて前回相対関係を更新する。このように、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、前回相対関係に遡って今回相対関係の正誤を検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
車両のためのFMCWレーダセンサ
車両のためのFMCWレーダセンサであって、レーダ信号を生成し送信し受信するための高周波ユニットと、送信されたレーダ信号の変調を制御するための変調素子(36)と、受信されたレーダ信号から形成される中間周波数信号(22)のための少なくとも1つのアナログ事前処理段(48)と、少なくとも1つのアナログ/デジタル変換段(50)と、変調素子(36)を駆動し、アナログ/デジタル変換段(5)のデジタル信号をさらに処理するためのプロセッサとを有する、FMCWレーダセンサにおいて、変調素子(36)と、事前処理段(48)と、アナログ/デジタル変換段(50)とは、1つの半導体モジュール(12)に組み込まれ、半導体モジュール(12)はさらに、半導体モジュールの構成要素を設定し監視するための監視素子(12)およびレジスタ(44)と、プロセッサへのインタフェース(52)を有する、FMCWレーダセンサに関する。 (もっと読む)
車両用灯具
【課題】 ミリ波レーダを光源の発熱から保護でき、かつ見栄えよく搭載できる車両用灯具を提供する。
【解決手段】 リアコンビネーションランプ1において、灯具ボディ2と前面カバー3との間に灯室6を形成し、灯室6の内部に光源7,8を設け、灯室6の下側外部にミリ波レーダ14を設置する。前面カバー3の下部に遮蔽部19を形成し、遮蔽部19の内面にマイクロステップ形状のリフレックスリフレクタ20を装着する。リフレックスリフレクタ20でミリ波レーダ14を車両後方から覆い隠すとともに、平滑な再帰性反射面で遮蔽部19の厚みを均一にし、電波Wの減衰を抑制する。点灯頻度の高い光源7を灯室6の上部に配置し、灯室6からミリ波レーダ14に伝わる熱量を減少させる。
(もっと読む)
目標検出装置
【課題】長パルス信号波による受信障害を回避することができる目標検出装置を提供すること。
【解決手段】短パルス信号を送信し、目標における前記短パルス信号の反射により生じた第1の信号が受信された時点を前記目標との距離として識別する第1の識別手段と、前記短パルス信号よりパルス幅が長い長パルス信号を前記短パルス信号の後に送信し、前記目標における前記長パルス信号の反射により生じた第2の信号のパルス幅を圧縮することにより、前記目標を識別する第2の識別手段とを備えた目標検出装置において、前記第2の識別手段は、前記第1の信号が受信された時点が早いほど、前記長パルス信号の送信電力を小さな値に設定することによって構成される。
(もっと読む)
物体位置検出装置
【課題】 自車両の後方に存在する物体が位置する車線を精度良く推定できる物体位置検出装置を提供すること。
【解決手段】 自車両の後方に存在する他車両等の後方物体が位置する車線を推定する物体位置検出装置1であって、バッファ更新処理部82によって自車両の過去の走行位置を記憶し、他車両絶対位置演算部83によって後方物体の位置を検出し、自車両の過去の走行位置と後方物体の後方物体の位置との相対位置関係に基づいて、他車両車線推定部85によって後方物体が位置する車線を推定する。よって、自車両が走行した車線に対する後方物体の位置が推定できる。このため、後方物体が位置する車線を精度良く推定することができる。
(もっと読む)
レーダシステム、及び移動体
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
レーダ装置
【課題】ターゲットの方向や個数を正しく算出できるレーダ装置を得る。
【解決手段】方向算出部32は、ターゲット40の複数変調区間のピーク周波数が0付近である場合に、ピーク周波数が0付近のピーク周波数スペクトラムから生成される共分散行列の加算を禁止する共分散行列加算禁止部33を有し、ピーク周波数が0付近外のピーク周波数スペクトラムから生成される共分散行列を加算した加算共分散行列に基づいてターゲット40の方向を算出する。
(もっと読む)
レーダ装置
【課題】 先行車両のような障害物の向こう側に存在する先先行車のような物体についてもその位置等を正確に検出することを可能としたレーダ装置を提供する。
【解決手段】 物体に電磁波を照射し、その反射に基づいてその物体の位置を検出するレーダ(例えば、レーザレーダ1)の出力から距離・方位検出手段21により物体までの距離・方位を検出し、路面位置判定手段22で判定した路面位置に基づき、虚像物標判定・変換手段23は、判定した位置が路面より下に位置すると判定した場合には、路面に対して面対称な位置に変換した位置を物体の本来の位置とし、出力手段24により出力する。
(もっと読む)
対象物検出装置及び対象物検出システム
【課題】ミリ波レーダで対象物を検出するに際し、ミリ波の反射波が微弱である人物を、車両又は道路上の他の物体と区別して有効に検出することができる対象物検出装置、及び対象物検出システムを提供する。
【解決手段】ミリ波レーダから、対象物候補の方向(A,B,C)、距離及び反射波強度を取得し、遠赤外線カメラから、画像データを取得して人物候補領域の方向(D,E)を特定し、人物候補領域にて特定した人物候補への方向(E)に反射波強度が所定値よりも低い対象物候補が有るか否かを判断し、対象物候補が有る(Bの方向の対象物候補)と判断した場合、当該対象物候補を人物候補として検出する。
(もっと読む)
物体までの距離及び物体の速度のうちの少なくとも一方を求める方法、並びに物体までの距離及び物体の速度のうちの少なくとも一方を求める装置
【課題】効率的に又は実効的に、マルチユーザのシナリオにおいて動作するFM−CWレーダを提供する。
【解決手段】物体が近づいてくるか、又は離れていくかの指示を判断すること、並びに、周波数が一定であるセグメント及び周波数が変化するセグメントから成るシーケンスを含む呼掛け信号を生成することを含む。物体が近づいてくることを上記判断するステップが指示する場合には、該周波数が変化するセグメントの周波数が減少し、物体が離れていくことを上記判断するステップが指示する場合には、該周波数が変化するセグメントの周波数が増加する。呼掛け信号を送信し、物体から反射される呼掛け信号の反射信号を検出する。次に、呼掛け信号及び呼掛け信号の反射信号の組み合わせを用いて、物体までの距離及び物体の速度のうちの少なくとも一方を求める。
(もっと読む)
PCSセンサの電波軸調整装置及びその方法
【課題】車両に搭載するPCSセンサの取り付け位置を容易に調整でき、その調整作業を行うための作業占有面積の縮小化を図ることができるPCSセンサの電波軸調整装置及びその方法を提供する。
【解決手段】車両7に取り付けたPCSセンサ2の上部に複数のレーザポインタを備えたポインタ照射用治具3を取り付ける。該治具3から照射したレーザポインタ9、12a、12b、13a、13bを上方に配置したポインタ投影用スクリーン4に投影する。該スクリーン4には、正位置に取り付けたPCSセンサの中心点を通る水平方向と垂直方向を示すX軸14とY軸15を予め表示しておく。該スクリーン4の上方に配置されたポインタ測定用カメラ5によりスクリーンの映像を撮影して位置情報を解析し、解析した情報をパソコン6に送信する。調整作業者は、パソコン画面上に表示された取り付けズレ量を観測しながら調整手段によりPCSセンサ2の上下方向および左右方向の向きを調整する。
(もっと読む)
マイクロ波検出器
【課題】 従来の方法よりも確実に誤警報源を識別することができ、初めて通過する誤警報源の前でも、正規のマイクロ波検出に伴う警報の出力を抑制すること
【解決手段】 所定のマイクロ波を検出するマイクロ波検出手段(12,14,16)と、その逓倍マイクロ波を検出する逓倍マイクロ波検出手段(22,24,26)と、を備え、解析判定部30は、2つの検出手段の出力に基づき、同一タイミングで基本波となるマイクロ波とその逓倍マイクロ波を受信した場合にはマイクロ波検出手段で件支出したマイクロ波は誤警報源からのマイクロ波と判断し、警報表示部42,警報音出力部44を用いた正規の警報を抑制する制御を行う。
(もっと読む)
ミラーおよび周辺監視装置
【課題】可視光を反射するといったミラー本来の機能を維持しつつ、レーダ装置が照射する電磁波の透過に影響を与えることのないミラーおよび周辺監視装置を提供する。
【解決手段】レーダ装置のアンテナの前方に設置されるミラーであり、透明基板の表面に形成されたインジウムまたはスズの蒸着膜を光反射面とし、上記光反射面は、レーダ装置が電磁波を照射する方向に向けられていることを特徴とする。また、移動体に搭載され、当該移動体の外部に向けた検出範囲内の物体を検出するレーダ装置と、透明基板の表面に形成されたインジウムまたはスズの蒸着膜を光反射面とするミラーとを備え、上記光反射面は、レーダ装置が電磁波を照射する方向に向けられていることを特徴とする周辺監視装置。
(もっと読む)
レーダー信号処理方法およびレーダー信号処理装置
以下のことを含む、対象物までの距離および対象物の速度を測定するためのレーダー装置および方法。複数のRF信号を送信し、各RF信号は特定の周波数を含んで特定の有限期間送信される。複数の信号は同じ周波数を有する信号と異なる周波数を有する信号とを合わせて含む。対象物からの反射後、複数の信号を受信する。各信号および対応する反射信号との間の位相差を測定する。同じ周波数信号の位相差を処理し、対象物のためのドップラー周波数を含む位相回転周波数を測定する。異なる周波数信号の位相差を処理し、前記対象物のためのドップラー周波数および距離周波数とを含む第2の位相回転周波数を測定する。第1の位相回転周波数と第2の位相回転周波数とを比較して、対象物の距離周波数とドップラー周波数とを識別する。ドップラー周波数を速度に変換し、距離周波数を距離に変換する。 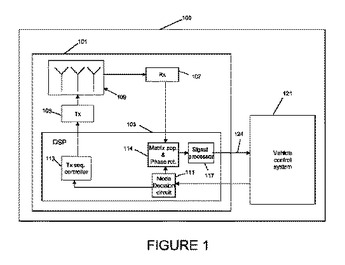 (もっと読む)
(もっと読む)
レーダ装置
【課題】小型化や車両部品形状の制約の条件を満足しながら外部からのノイズの影響を受けにくくするとともに水滴がレーダ内部に侵入しにくくなるレーダ装置を提供する。
【解決手段】内壁29がアンテナユニット1の収容時の平面アンテナ14の位置及び平面アンテナ14の最大回動角θに対応した位置にあるので、矢印Aで示すような外部からのノイズの影響を受けにくくするとともに、雨等の水滴がレーダ装置の内部に侵入しにくくなる。なお、内壁29の高さHは、Cで示すような電波の送受信に影響のない高さとなる。また、外壁28がアンテナユニット1の収容時の平面アンテナ14の位置より低い位置にあるので、小型化や車両部品形状の制約の条件を満足する。
(もっと読む)
レーダ装置
【課題】複数のアレイアンテナを利用して位相モノパルス方式によって電波の到来する方位角と仰角の両方を検知することを可能にする。
【解決手段】レーダ装置において、受信アンテナは、複数の素子アンテナが配列された少なくとも3つのアレイアンテナを、水平方向に互いに隣接するように並べて構成され、当該3つのアレイアンテナの位相中心点が二等辺三角形を形成するように、当該3つのアレイアンテナのうちの中央のアレイアンテナが鉛直方向にずらして配置される。レーダ装置は、当該3つのアレイアンテナによってそれぞれ受信された電波の位相の関係に基づいて、当該3つのアレイアンテナのうちの隣接する2つのアレイアンテナによって受信された電波の位相差を補正する機能を備える。
(もっと読む)
401 - 420 / 1,457
[ Back to top ]