
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
301 - 320 / 1,457
レーダ装置
【課題】高精度に目標を観測できるレーダ装置を提供する。
【解決手段】第1送受信兼用素子と第2送受信兼用素子とに分割された送受信兼用素子11aと、第1受信専用素子と第2受信専用素子に分割された受信専用素子12aを備えたアンテナ10と、観測角度範囲を複数に分割して、アンテナの各素子により、分割した角度範囲の各々を覆うように送信ビームを形成し、受信は、アンテナの各素子のビーム指向方向を第1送受信兼用素子と第2送受信兼用素子と同じ方向にして、第1送受信兼用素子と第1受信専用素子、第2送受信兼用素子と第2受信兼用素子により、ΣとΔの位相モノパルスビームを形成して複数の角度範囲の各々を覆い、第1送受信兼用素子、第2送受信兼用素子、第1受信専用素子および第2受信専用素子により、狭ビーム幅のビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37を備える。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム

【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】障害物や駐車枠などの本来反射波を得たい対象物からの反射波を適切に検出することができる障害物検出装置を提供すること。
【解決手段】車両の周辺に送信波を発信する発信手段と、前記送信波の対象物からの反射波を、受信反射波として受信する受信手段と、前記受信手段により受信した受信反射波が、一定時間連続して発生しているか否かを判断し、一定時間連続して発生している場合に、該受信反射波を路面からの反射波として検出する路面反射波検出手段と、前記路面からの反射波であると判断された受信反射波に基づいて、前記受信手段により受信した受信反射波中に含まれる路面からの反射波を検出するためのノイズ判定閾値を設定する設定手段と、前記ノイズ判定閾値を用いて、前記受信手段により受信した前記受信反射波から、路面以外の対象物の反射波を検出する対象物反射波検出手段と、を備えることを特徴とする障害物検出装置。
(もっと読む)
温度補償される距離検出装置
【課題】車両のバンパに適用する場合等、厳しい使用環境下においても短時間で回路が安定し、また、温度変化に対して距離検出精度の変化の少ない距離検出装置を提供する。
【解決手段】距離検出装置は、送信アンテナ1と受信アンテナ2と送信回路部3と受信回路部4とからなる。送信回路部3は、送信アンテナ1から送信される電波信号を生成する電波信号生成部31と、温度変化による電波信号の振幅変動を補償する振幅温度補償部32とを有する。受信回路部4は、受信サンプリング信号を生成する受信サンプリング信号生成部41と、受信アンテナ2により受信する電波信号と受信サンプリング信号とを用いて対象物までの距離を算出する演算処理部10と、温度変化による受信サンプリング信号の位相変動を補償する位相温度補償部42とを有する。
(もっと読む)
FM−CWレーダ装置および数値補正方法
【課題】安価なAD変換器を用いて、スプリアスの少ないFM−CWレーダ装置を得る。
【解決手段】FM−CWレーダ装置が有するAD変換器に対して正確な試験用電圧を印加した際にAD変換器より出力されたコードと印加した電圧値とを対応付けたテーブルを記憶するADコード補正手段を設ける。そして、ADコード補正手段は、AD変換器より出力されたコードを取得し、取得されたコードと対応付けられた電圧値を出力する。FM−CWレーダ装置は、ADコード補正手段より出力された電圧値を用いて、目的物の相対速度および距離等を計測する。
(もっと読む)
マイクロ波検出システム
【課題】 コンテンツとしての車両速度計測装置位置情報等の不正な利用を防止することができるマイクロ波検出器用ダウンロードアダプタを提供すること
【解決手段】
所定目標物または所定誤動作源からのマイクロ波を受信して警報を発生するマイクロ波検出器との間で通信を行なうとともに無線通信端末mtとの間で通信を行なう通信制御部21と、無線通信端末mtにより、サーバ30からダウンロードした所定目標物や所定誤動作源の位置情報とを一時記憶する一時記憶部23と、一時記憶部23に記憶した前記位置情報のダウンロードを制御するとともに、当該ダウンロードが終了した後に、当該ダウンロードした前記各位置情報を前記マイクロ波検出器に転送するデータ制御部22とを備える。
(もっと読む)
車載レーダー装置
【課題】同一方式、同一周波数帯のレーダー波が混在する環境にあっても、自車からの送信波の反射波たる受信波の識別を容易として、要求されるレーダー機能を適正に維持することのできる車載レーダー装置を提供する。
【解決手段】送信アンテナ150からFM−CW方式の時分割信号として送信される送信波の送信区間とする時間および送信停止区間とする時間を制御する送信区間コントローラ110と、受信アンテナ210を介して受信される受信波のパワーを検出するパワー検出部240と、その検出されるパワーが受信処理の可能なレベルに対して設定された閾値を上回ると判断され続ける持続時間と、送信区間コントローラ110により制御される送信区間とする時間とが一致するとき、送信波の反射波たる受信波を受信していると判断するパワー判断部250とを備える。
(もっと読む)
レーダの軸ずれを判定する装置
【課題】車両に搭載され、前記車両の側方に向けて電磁波を放射すると共に、反射した該電磁波を受信して物体の距離および方位を検出するレーダを提供する。
【解決手段】車両の車速を検出し、該車速が所定値以上の時、少なくとも検出した距離に基づいて、多重反射が生じているかどうかを判定する。多重反射が生じていると判定されたならば、該多重反射の反射波について検出された方位と、所定の基準方位との差に基づいて、レーダの軸ずれを判定する。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングする速度グルーピング部36と、前記速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備えている。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
レーダ装置
【課題】MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】ビート信号に基づいて、ターゲットの距離および相対速度(もしくは方位)を求め、それらを履歴情報として記憶する。そして、記憶された履歴情報から、今回の到来波推定の際におけるターゲットの位置を予測し、この予測されるターゲットの位置からターゲットの複数が並ぶか否かを予測し、その予測結果に基づいて到来波の数の推定を行う。このように、前回のサイクルの際に得られたターゲットの履歴情報に基づいて、前回のサイクルの際に並走していなかったターゲット同士が今回のサイクルの際に並走するか否か、もしくは、前回のサイクルの際に並走していたターゲット同士が今回のサイクルの際に並走しなくなるか否かを予測して到来波数を修正する。これにより、より正確に到来波数を推定できる。
(もっと読む)
物体検出装置
【課題】本発明は、時系列でのレーダの反射データが不安定な場合でも物体を高精度に検出することができる物体検出装置を提供することを課題とする。
【解決手段】レーダ検出手段10で検出された反射データをセグメントにグルーピングし、セグメント毎の反射データに基づいて物体を検出する物体検出装置1であって、所定の条件に基づいて反射データをセグメントにグルーピングするグルーピング手段22と、各反射データについて過去に属したセグメントの識別情報を特定するセグメント履歴特定手段23と、今回グルーピングされたセグメントに属する反射データの過去のセグメントの識別情報に基づいて、今回グルーピングされたセグメントと過去にグルーピングされたセグメントとの同一性を判別するセグメント識別手段23とを備えることを特徴とする。
(もっと読む)
車両用物体検知装置
【課題】車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12と、物体上における電磁波の反射点の位置を算出する反射点算出部21と、複数の反射点の位置に基づき物体の幅を算出する検知対象幅算出部22と、複数の反射点の位置に基づき物体の代表点の位置を設定する代表点設定部23と、反射点又は代表点の位置の変化量に基づき物体の自車幅方向の相対速度となる横相対速度を算出する横相対速度算出部24と、所定周期毎に検知された物体の検知履歴に基づき、物体が静止物であり、かつ、物体の幅の増大量が変化量閾値Wthrよりも大きい場合に、物体を幅広がり静止物として記憶する記憶制御部25および静止物記憶部26と、幅広がり静止物として記憶された物体がレーダ装置12のレーダ検知端にて検知された場合に横相対速度を補正する横相対速度補正部27とを備える。
(もっと読む)
レーダ装置
【課題】レーダの効率を向上することができ、しかも、車両の走行状態に対応して適切に前方等の検知が可能なレーダ装置を提供すること。
【解決手段】ステップ200では、車速センサ3からの信号に基づいて、車速の判定を行う。具体的には、車速Vが実質的に停車状態の速度V1未満(V<V1)か、又は、通常の走行状態を示す車速V2以上(V2≦V)か、或いは、低速走行を示す速度(V1≦V<V2)かを判定する。ステップ210では、停車状態であるので、レーダ送信電力が低出力領域Aに該当するか否かを判定する。ステップ220では、車両が低速走行状態であるので、レーダ送信電力が中出力領域Bに該当するか否かを判定する。ステップ230では、車両が通常走行状態であるので、レーダ送信電力が高出力領域Cに該当するか否かを判定する。
(もっと読む)
干渉防止レーダ装置
【課題】電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供する。
【解決手段】ミリ波を発信して当該ミリ波に対する反射波を受信するレーダセンサ1を有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置10であって、ミリ波を発信する他のレーダ装置と同期してレーダセンサ1によりミリ波を発信するために用いられる時刻同期信号を受信する同期信号取得部42と、同期信号取得部42により受信された時刻同期信号に対応する方角に向けてミリ波が発信されるように、レーダセンサ1を制御する時分割駆動制御部41と、を備える。この干渉防止レーダ装置10により、ミリ波を送信する他の装置との電波干渉をより確実に防止することができる。
(もっと読む)
車載レーダ装置
【課題】自車が停車もしくは所定の速度以下の際に、放射するパルスの送信波の電力を下げるように制御すると、受信信号の受信レベルが小さくなるためS/Nが小さくなり、目標物体が検知しにくくなる。
【解決手段】目標物体30に向けて送信部11からパルスの電波を送信し、受信部12により目標物体で反射した電波を受信して、目標物体までの距離等を算出する信号処理手段13を備えた車載レーダ装置において、受信部で受信した信号から1/f雑音を抑えるノイズ除去手段123を設けると共に、自車が停車もしくは所定の速度以下の際に送信部から送信するパルスの電波の平均電力を低下させる電力制御手段112、115を設け、自車が停車もしくは所定速度以下の際に送信電力を低下させることに伴い受信信号のS/Nが低下するのを防ぎ、かつ電力消費を必要最小限に抑える。
(もっと読む)
ミリ波撮像装置およびレーダーのためのデュアルバンドアンテナアレイおよびRFフロントエンド
【課題】低コストの3次元集積化自動車用レーダーを得る。
【解決手段】自動車用レーダーは、上面と底面を有する印刷回路基板、印刷回路基板の底面に取付けられ且つ第1の周波数信号と第2の周波数信号を生成するプロセッサ、印刷回路基板の上面上に形成された第2の液晶ポリマー層、第2の液晶ポリマー層上に印刷され且つパッチを有する第2のマイクロストリップアレイ、第2の液晶ポリマー層上に形成された第1の液晶ポリマー層、第1の液晶ポリマー層上に印刷され且つ有孔パッチを有する第1のマイクロストリップアレイ、パッチの下方に配置され且つ第2のマイクロストリップアレイに接続されたアンテナ、さらに第2の液晶ポリマー層の底面に接続され且つプロセッサに接続され、さらに第1のマイクロストリップアレイに第1の周波数の信号を送信し、第2の周波数の信号を第2のマイクロストリップアレイに送信する送信/受信モジュール、を備える。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
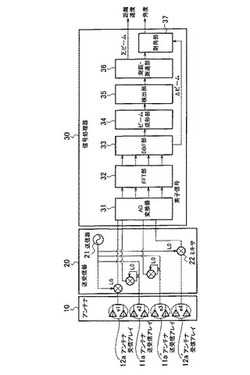
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
レーダー装置
【課題】より正確に障害物を検出可能とするレーダー装置を提供する。
【解決手段】電磁波を照射し、物体により反射された当該電磁波の反射波を受信して当該物体を検出するレーダー装置であって、電磁波を照射する照射手段と、電磁波の照射方向を示す照射軸線を上下方向へ揺動する照射方向揺動手段と、所定のタイミングにおいて、揺動手段を動作させて照射軸線の向きを水平方向以外の方向へ向ける照射方向制御手段とを備える、レーダー装置である。
(もっと読む)
301 - 320 / 1,457
[ Back to top ]