
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
501 - 520 / 573
パルス圧縮レーダ用データ再生装置、再生方法及びパルス圧縮レーダ装置

【課題】A/D変換後デジタル的にIQ分離を行うリアル方式のパルス圧縮レーダ用データ再生装置として、IQ分離にデジタルフィルタを使用せず、回路の小型化・軽量化が可能で、かつ、対象信号の帯域幅に応じたサンプリング速度の低減を可能とする。
【解決手段】受信機2で周波数変換した受信信号をA/D変換器32でA/D変換してデジタルIQ分離回路33でデジタル的にI信号とQ信号に分離した後、間引き処理回路34で帯域幅に応じて1/n(n:整数)に間引きし、0詰め処理回路41で、間引いたデータ部分及びI信号とQ信号とで時間的に交互にずらして生じた空きデータ部分にデータ無しを意味する0詰めを行って、信号と虚像信号との重なりをなくし、しかる後、FFT42で周波数軸上のデータに変換後、相関処理回路43で参照関数を用いた相関処理により虚像信号を除去した信号成分のみをパルス圧縮して、逆FFT44で時間軸上のデータに戻す。
(もっと読む)
イベント捕捉およびフィルタリングシステム

【課題】 関心イベントを決定するために検出されたイベントをフィルタリングするシステムおよび方法を提供する。
【解決手段】 検出されたイベントを識別し、センサデータを評価して各イベントに関連する少なくとも1つの特性を決定し、複数の検出されたイベントとそれらの関連する特性とを報告する。少なくとも1つの関連イベント発生部が、少なくとも1つの関連イベントを生成し少なくとも1つのイベント報告を生成するように動作可能である。所与のイベント報告は、関連イベントに関連する少なくとも1つの特性を提供する。イベントフィルタリングシステムが、少なくとも1つのイベント報告を検出されたイベントと比較することにより、複数の検出されたイベントの中の少なくとも1つの関連イベントを識別する。
(もっと読む)
送受信装置及び送受信方法
【課題】 反射したECM波をレーダの受信波として使用する送受信装置において、ECM波の一定区間毎にヘッダを設けて連続送信の場合でも相関演算の計算区間を制限して演算量を軽減し、かつサイドローブ発生確率を低減できる送受信装置を提供する。
【解決手段】 送信部2はECM波2aを生成し目標物4へ向けて送信する一方、ディジタル参照信号2bと送信タイミング信号2cが相関処理部5へ渡される。ECM波2aは目標物4で反射し、反射波7aから受信ヘッダが検出され、ディジタル受信信号7bと受信タイミング信号7cが相関処理部5へ渡される。相関処理部5は送信タイミング信号2c及び受信タイミング信号7cに基づき、ディジタル参照信号2bとディジタル受信信号7bの相関信号5aを求め、ピーク値検出部8が相関信号5aのピークを検出し、送受信装置1と目標物4との間の距離を算出する。
(もっと読む)
パルスレーダ装置
【課題】 パルスレーダ装置におけるNull点の影響を回避する。
【解決手段】 パルスの周期ごとに送信波の周波数を変える。これにより或る周波数においてNull点となっても、これと異なる周波数においてはNull点とはならないので距離の測定が可能となる。
(もっと読む)
レーダ装置
方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の方向を算出し、この方向と前記相対距離と相対速度から前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタと、を備えた。 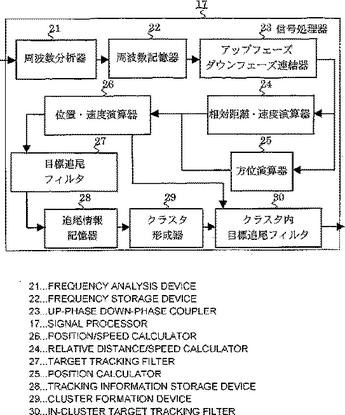 (もっと読む)
(もっと読む)
埋設された長尺物体の探査装置および探査方法
【課題】被探査領域に埋設された合成樹脂管等の長尺物体を探査するための探査装置および探査方法を提案する。
【解決手段】本発明に係る探査装置(1)は,演算手段(7)および表示手段(8)を有する評価ユニット(6)を具え,さらに,被探査面(F)に沿って移動可能であり,かつ,探査経路センサ(10)と,アンテナ(12a)が設けられた送受信ユニット(11a)とを有する手持ち式の探査ヘッド(9)を具える。前記アンテナは,被探査面(F)内で相互に離間して配置された少なくとも2個のアンテナ(12a,12b)を含み,これらアンテナ(12a,12b)の被探査面(F)内における間隔が5cm〜50cmの範囲内に設定されている。
(もっと読む)
干渉型レーダ
【課題】 受信アンテナによる空間分解能を上げずに、感度を向上させた干渉型レーダを提供する。
【解決手段】 目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する大口径アレイアンテナを備えた受信部Rとを有している。前記送信部Tは、目標対象物の方位及び距離を検出するためのFMCW信号を送信アンテナから出力する機能を有している。前記受信部Rは、前記大口径アレイアンテナ2を複数の等しい小ブロックに分割した干渉ブロック9c毎に受信する受信信号に相関処理を行う複数の相関処理部15と、前記複数の相関処理部15から出力される信号の相等しい信号成分同士をベクトル合成する合成器19とを含んでいる。
(もっと読む)
検出装置
【課題】 レーザ光を目標位置に照射して目標位置の状況を検出する検出装置において、対向車からのレーザ光を受光したような場合など、他の検出装置からのレーザ光を受光したような場合にも、これにより誤検出が生じないような検出装置を提供する。
【解決手段】 数種の変調パターンのうち目標位置毎に個別に設定した変調パターンにてパルスレーザ光を変調してレーザ出射部401から目標位置に出力する。DSP10は、レーザ出射部401から出力したパルスレーザ光の変調パターンとレーザ受光部402によって受光したパルスレーザ光の変調パターンがマッチングしたときのみ目標位置に障害物が存在するとして検出し、障害物との距離を測定する。これにより、誤って対向車等からパルスレーザ光を受光しても、これをもとに目標位置の状況を誤検出する惧れが抑制される。誤検出の可能性は、変調パターンの種類を増やす程、抑制される。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
ネットワークレーダ装置
【課題】 目標検出性能を向上するネットワークレーダ装置を得る。
【解決手段】 レーダアンテナ1a,2aの各々の位置を検出する位置検出部1b,2bと、レーダアンテナ1a,2aの各々のビーム指向方向を制御するビーム制御部1c,2cと、レーダアンテナ1a,2aの各々の位置とビーム指向方向とに基づいてレーダアンテナ1a,2aからの受信信号の到来時刻差を求め、レーダアンテナ1a,2aからの受信信号の到来時刻をその到来時刻差に応じて補正する目標距離補正部11,12と、補正されたレーダアンテナ1a,2aからの受信信号の相関処理を行い、それら受信信号の振幅値に応じて目標の有無を検出するバイナリ積分型目標検出部21とを備えた。バイナリ積分型目標検出部21において、レーダアンテナ1a,2aからの受信信号の相関処理での相関ゲートサイズを小さくすることができ、目標検出性能を向上することができる。
(もっと読む)
目標検出装置
【課題】 船舶などの目標が生み出す引き波の影響を排除して真の目標を正確に検出し、真の目標がカメラの撮影範囲から逸脱しないようにカメラを制御することができる目標検出装置を得ることを目的とする。
【解決手段】 クラスタリング処理部6により検出された目標のビデオ領域における進行方向の広がり部分を検出し、その目標のビデオ領域から進行方向の広がり部分を除去する広がり除去部10を設け、その広がり除去部10により広がり部分が除去された目標のビデオ領域の重心位置を計算し、その重心位置に応じてカメラ16を制御する。
(もっと読む)
レーダ信号処理装置
【課題】物標からの反射波の距離減衰などに応じて相関行列を適切に推定することの出来るレーダ信号処理装置の提供
【解決手段】物標からの反射波を受信信号S2として受信して、所定の観測信号S3をそれぞれ出力する複数の観測手段OB、各観測信号から、受信アンテナからの距離r1,…,rnに対応した距離成分XRp(r1),…,XRp(rN)を抽出する距離成分抽出手段DS、抽出された各距離成分を集め、それら各距離成分に対応した相関行列推定値Rxxqを、指数平滑型相関行列推定法を用いて各距離成分に対応した忘却係数αをパラメータとする形でそれぞれ演算推定する相関行列推定手段RM、推定された相関行列推定値に基づいて物標の有無又は運動状態を推定する手段OM及び、受信アンテナ5からの距離に対応した忘却係数をそれぞれ演算決定し、相関行列推定手段に、各距離成分に対応した忘却係数として出力する忘却係数決定手段FFを有して構成される。
(もっと読む)
物体認識方法及び装置
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体の表面形状情報を検出し、この物体の輪郭形状を認識する物体認識方法であって、表面形状情報を構成する標本群から任意の標本を抽出する標本抽出工程#1と、抽出した標本に基づいて形状モデルを定める形状モデル設定工程と、形状モデルに対する標本群の一致度を演算する一致度演算工程と、一致度に基づいて輪郭形状を定める輪郭形状決定工程と、を実施するものであり、標本抽出工程#1は、抽出した標本により形状モデルとして所定の形状が形成可能か否かを判定する概略形状判定工程#14を備え、所定の形状を形成不可と判定した場合には、改めて前記標本を抽出する。
(もっと読む)
レーダ装置
【課題】 小さい開口アンテナを用いた小さなハードウェア規模で精度よく目標位置を評定できるレーダ装置を提供する。
【解決手段】 空間を走査する空中線1と、空中線で空間を走査することにより得られた受信信号に基づき目標を検出する目標検出回路6と、自己の位置を測定する航法装置5と、今回の走査において目標検出回路で検出された第1の目標と過去の走査において目標検出回路で検出された第2の目標との相関の有無を判定する相関回路8と、相関回路において相関が有る旨が判定された場合に、今回の走査時に航法装置で測定された位置から見て目標検出回路で検出された第1の目標が存在する可能性のある範囲と過去の走査時に航法装置で測定された位置から見て目標検出回路で検出された第2の目標が存在する可能性のある範囲との重なりに基づき目標位置を評定する位置評定回路9とを備えている。
(もっと読む)
アンテナ装置
【課題】 アンテナ利得をサブアンテナ数倍程度に増加させつつ、合成後のビーム幅をサブアンテナと同程度まで拡大させることができるアンテナ装置を提供する。
【解決手段】 分散配置した指向性ビームを有する複数の受信サブアンテナ1と、複数の受信サブアンテナ1のビーム指向方向を制御する統合ビーム制御器2と、受信サブアンテナ1を介して信号を受信する受信機3と、受信機3の出力信号の共分散行列を計算する共分散行列計算部5と、共分散行列の最大固有値に相当する固有ベクトルを計算する最大固有ベクトル計算部6と、固有ベクトルをウェイトとして各受信機3の出力信号に乗算する複素乗算部7と、ウェイトを乗算した各受信機3の出力信号の総和を計算して出力する総和計算部8とを有する受信用固有値ビームフォーミングプロセッサ4とを備える。
(もっと読む)
電波到来方向推定装置及び方法
【課題】 高い相関を有する複数到来波の到来方向を精度良くかつ高速に推定することができる電波到来方向推定装置及び方法を提供する。
【解決手段】 この電波到来方向推定装置は、複数のアンテナ素子から構成されるアレーアンテナと、その各アンテナ素子を介して到来波を受信する受信機と、各受信信号から相関行列を演算する相関行列演算器22と、演算された相関行列に、適当な修正値を特定の行列要素にのみ持つ修正行列を加算する修正行列加算器24と、修正行列が加算された相関行列の逆行列を演算する逆行列演算器26と、演算された逆行列に基づいてウエイトベクトルを演算するウエイトベクトル演算器28と、演算されたウエイトベクトルを用いて角度スペクトラムを演算する角度スペクトラム演算器30と、演算された角度スペクトラムのピーク波形から到来波の到来方向を推定する到来方向推定器32と、を含む。
(もっと読む)
車載レーダ装置
【課題】 電波をレーダ波とするレーダ装置において、路側物の検出を精度を向上させる。
【解決手段】 信号解析処理でのFFT処理結果に基づいて生成した受信ベクトルX(k)をユニタリ変換し、そのユニタリ変換された受信ベクトルY(k)に基づき、次式を用いて、過去の受信ベクトルを反映し、且つユニタリ変換された相関行列Ryy(k)を生成する(S210〜S240)。
Ryy(k)=α・Ryy(k−1)+(1−α)・Y(k)YH(k)
この相関行列Ryy(k)に基づいて生成したMUSICスペクトラムから静止物標に対応する候補点を抽出し、この候補点と、虚像を発生させる原因となった物標に対応する重要候補点とを用いてハフ変換を行うことで、路側物の配列状態を検出する(S250〜S320)。
(もっと読む)
パルスレーダ装置
【課題】 状況に応じた最適な測定範囲、および障害物の検出分解能を得ることのできるパルスレーダ装置を提供すること。
【解決手段】 クロック信号遅延分割回路2は、クロック信号発生部1によって生成されたクロック信号に基づいて、クロック信号を任意の時間だけ遅延させた1以上の遅延クロック信号を合成して成るクロック信号列を生成する。送信パルス生成部3は、クロック信号に基づいて送信パルスを生成するとともに、クロック信号遅延分割回路2で生成されたクロック信号列に基づいてレプリカパルスを生成する。相関部7は、電波受信部5によって受信される反射波とレプリカパルスとの相関演算を行う。信号処理部9は、クロック信号遅延分割回路2を制御して、クロック信号列を構成する遅延クロック信号の数、および各遅延クロック信号の遅延量を変化させる。
(もっと読む)
障害物検出装置
【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
到来方向推定装置及び到来方向推定方法
【課題】 到来方向推定に必要な演算量を低減しつつ高精度に到来方向推定を行う。
【解決手段】 複数のアンテナ素子の各前記アンテナ素子の受信信号から相関行列を計算し、前記相関行列の固有値を計算し、前記固有値を用いて到来電波の数を推定し、各前記アンテナ素子の受信信号を用いて離散フーリエ変換に基づくアルゴリズムにより到来電波の概略の到来方向を推定し、前記概略の到来方向に基づいて前記到来電波の到来方向を推定する方向範囲としての演算範囲を決定し、前記第1の到来波数と、推定された前記概略の到来方向の数とが一致する場合は前記離散フーリエ変換に基づくアルゴリズム、一致しない場合は当該アルゴリズムより到来電波の検出能力が高いアルゴリズムに基づき、前記演算範囲について到来方向の推定を行う。
(もっと読む)
501 - 520 / 573
[ Back to top ]