
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
401 - 420 / 573
センサシステム
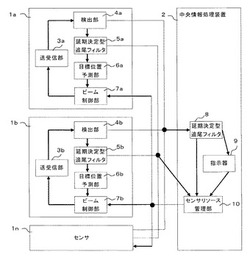
【課題】センサのリソースを管理し、複数のセンサを用いて、目標群を効率的に観測するセンサシステムを得る。
【解決手段】センサ1は、検出部4により目標を検出したとき、目標の観測値と関連するセンサ及びリソースの情報を中央情報処理装置2に通知し、中央情報処理装置2は、検出された目標に関する情報を処理し、目標の中央航跡を生成するとともに、生成された中央航跡に関連するセンサ及びリソースの情報をセンサリソース管理部10により管理し、指示器9により中央航跡に対する指示があったときは、センサリソース管理部10により、中央航跡に関連するセンサ及びリソースに対する指示として、該当センサ1のビーム制御部7に通知し、ビーム制御部7によって送受信部3に対してリソースの電波の照射方向を指示するようにした。
(もっと読む)
少なくとも2対の直交シーケンスを用いる改良されたエンコーディング・デコーディング方法
本発明は、両方のシーケンスの同時放出および直交変調による結果の伝送媒体に対する放出により通信システムにおいてオーバーロードされるデータを半分だけ減少させる目的でフィルタの係数を計算するために必要な時間を改善するための少なくとも2対の直交シーケンスを用いる改良されたエンコーディング・デコーディング方法に関する。  (もっと読む)
(もっと読む)
スペクトル拡散型レーダ装置用半導体装置

【課題】能動素子の非線形成分に起因した虚像信号を抑制したスペクトル拡散型レーダ装置用半導体装置を提供する。
【解決手段】スペクトル拡散型レーダ装置用半導体装置(逆拡散変調部133)は、(a)結合線路(線路162a,162b)と結合線路(線路162c,162d)とから構成され、不平衡信号として入力した受信信号を一対の平衡信号に変換する不平衡平衡変換回路162と、(b)1以上のトランジスタから構成されるスイッチ回路(トランジスタQ1,Q2,Q3,Q4)を有し、擬似雑音符号と同一の符号系列の擬似雑音符号が差動信号として入力し、不平衡平衡変換回路162から出力された一対の平衡信号が入力し、差動信号として入力した擬似雑音符号を使用して、一対の平衡信号をスイッチ回路によって逆拡散するバランス型逆拡散回路161とが同一の半導体基板上に形成されている。
(もっと読む)
ネットワークレーダシステム、レーダおよび中央制御装置
【課題】或るレーダが受け持った追尾目標を他のレーダが探知するのを防ぎ、システム全体としての探知性能の劣化を抑える。
【解決手段】確立除外情報抽出部24により、各レーダの探知覆域を既追尾目標が通過するかどうかを判定して、探知覆域を通過する場合に限り確立除外情報を作成してその探知覆域を形成するレーダに対して通知するようにし、このことによって、対応するレーダの追尾処理部14の追尾航跡の確立処理において、通知された確立除外情報と相関のとれる航跡に対しては確立させないようにしている。
(もっと読む)
レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置
【課題】グレーティングローブが発生するような状況でも確実に且つ簡素な処理で物標の方位を検知できるレーダの物標検知方法を提供する。
【解決手段】方位検出部13は、受信信号に基づく方位スペクトルを取得し、各スペクトルピークの方位およびピークレベルを検出する(S101→S102)。方位検出部13は、各スペクトルピークの方位領域に対応する指向性パターンの指向性レベルを読み出し(S103)、指向性レベルが大幅に低い方位のスペクトルピークを除外する(S104)。方位検出部13は、除外しなかったスペクトルピーク毎にピークレベルの軌跡を算出するとともに、対応する方位領域の指向性レベルの軌跡を読み出し、これらの相関度を算出する(S105→S106)。方位検出部13は、最も高い相関度のスペクトルピークの方位の物標の方位として出力する(S107)。
(もっと読む)
通信統合レーダ装置、通信統合レーダシステム
【課題】装置規模を増大させることなく、精度の良いチャネル行列をリアルタイムで生成可能な通信統合レーダ装置、及びこれを用いた通信統合レーダシステムを提供する。
【解決手段】アクティブターゲット装置からの折返波に基づくIF帯のビート信号の距離周波数スペクトルに基づき、周知のFMCWレーダの手法を用いて、各折返波に基づく信号成分(即ち、アクティブターゲット装置からの信号)を分離し(S210〜S240)、その分離した信号成分に基づいて、各受信アンテナで受信される受信信号から各アクティブターゲット装置毎の信号を分離抽出する際に用いるウェイト行列の生成に用いるチャネル行列を生成する(S250〜S260)。
(もっと読む)
無線測位システムおよび無線測位方法
【課題】本発明の目的は、高速で移動する移動体の位置座標を高精度で測位するシステムと無線測位方法を提供することである。
【解決手段】本発明では、移動体は測位基準点となる複数のマーカ装置に測位要求信号を同報送信し、複数のマーカ装置は測位要求信号を受信した時に、測位データを前記マーカ装置固有の通信チャンネルを用いて前記移動体に送信し、前記移動体は前記測位データによる前記マーカ装置の座標、マーカ装置までの往復時間を用いて移動体の現在位置座標を決定する無線測位システムを用いる。移動体と複数マーカ間における測位の通信時間が短縮され、移動体の正確な測位が可能となる。
(もっと読む)
レーダ装置及び物標位置検出方法
【課題】ビーム角度ごとの反射ビームの強度が複数の極大値を有するような分布形状を形成したときに,1つの物標からの反射ビームによるものであるかを判別して,精度よく物標位置を検出する。
【解決手段】スキャン式レーダ装置により,所定のビーム角度ごとに順次ビームを射出してスキャンを行い,ビーム角度ごとの反射ビームの強度の分布形状を求め,スキャンごとに分布形状が極大値を示す角度方向を1つの物標位置として検出する。そして第1のスキャンにおいて1つの極大値を有する第1の分布形状が形成された後,第2のスキャンにおいて複数の極大値を有する第2の分布形状が形成され,且つ第1の分布形状を形成する反射ビーム本数の合計と第2の分布形状を形成する反射ビーム本数の合計との差が基準値以下である場合は,当該第2のスキャンでは第2の分布形状に基づき1つの物標位置を検出する。
(もっと読む)
対象物体の高さ評価法及びレーダーシステム
【課題】低い対象物体及び高い対象物体間を識別する車両用レーダーシステムの提供。
【解決手段】本発明は、対象物体(202)が反射したレーダー信号(206,209)を使用して対象物体の高さを評価する方法及びレーダーシステムに関する。レーダーシステムは、受信器(43)、プロセッサ(44)、相関器(45)及び決定回路(47)を有する。受信器は、対象物体が反射した複数のレーダー信号を検出する。プロセッサは、異なる複数の射程のそれぞれで複数の反射信号の振幅を解明して対象物体振幅データ組を生成する。相関器は、対象物体振幅データ組が対象物体の特定高さと相関があるかどうかを決定する。決定回路は、対象物体の高さが、対象物体振幅データ組と最もよく合致する保存された振幅データ組の一つに対応する高さであると宣言する。
(もっと読む)
多目標追尾装置
【課題】従来の多目標追尾装置は、レーダから得た目標の位置情報のみに基づいて目標航跡の相関仮説を生成して行うために、複数の目標の航跡が接近する等複雑な航跡を有する場合には、誤った相関結果を導く可能性が高く、誤追尾が生じやすいという課題があった。本発明は、より信頼度が高い目標追尾が可能な多目標追尾装置を得ることを目的とする。
【解決手段】仮説照合部18は、位置情報追尾処理部4が目標の位置情報から生成した目標航跡を含む仮説群と、目標識別追尾処理部13が目標の位置情報と目標の識別情報から生成した角度航跡との類似度を計算することにより、前記仮説群に含まれる仮説の取捨選択を行う。これにより、誤った相関結果を導く可能性を低くし、より信頼度が高く、正確な相関決定ができる。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法が開示される。
【解決手段】入力信号を受信、上記入力信号のチャネル歪みを補償後復調し、複素数値表現を形成、上記復調した入力信号から基準信号および目標物信号を推定し、上記基準信号の一部を減らすことであって、上記基準信号は、適応的にフィルタリングされ、出力目標物信号が形成され、上記基準信号の一部を減らすこと、上記出力目標物信号、基準信号に対して逆変換オペレーションを実施、上記出力目標物信号について、複数の目標物ビームを形成、ビームのそれぞれについて、間引きした複数のラグ積を形成、上記基準信号について、間引きした複数のラグ積を形成、ビームのそれぞれについてクロスアンビギュイティ関数を推定、上記基準信号についての上記間引きした複数のラグ積を用いて、上記基準信号についてオートアンビギュイティ関数を推定することを含む。
(もっと読む)
遅延時間推定装置
【課題】遅延時間の推定精度の劣化を招くことなく、相関行列の次元数Mdを小さくして、演算量の低減を図ることができるようにする。
【解決手段】ディジタルの受信信号s(1),s(2),・・・,s(Nd)を予め設定された複数の遅延時間推定区間#l(1≦l≦L)の部分信号に分割し、複数の遅延時間推定区間#lの部分信号にデシメーション処理を施すデシメーション処理部7を設け、遅延時間推定部8−1〜8−Lが複数のデシメーション処理信号xl(1),xl(2),・・・,xl(M)に超分解能遅延時間推定処理を施して、遅延時間推定区間#lに存在している目標信号の遅延時間を推定する。
(もっと読む)
レーダ装置
【課題】相関処理の負荷を低減させると共に、速度や距離の測定におけるアンビギュイティを解消する。
【解決手段】符号変調を加えた高パルス繰り返し周波数信号の送信に先立って、符号変調を行なわない高パルス繰り返し周波数信号を送信し、この受信パルスと送信パルスとから対象物の反射波のドップラーシフト量を含む周波数を求めておき、次に送信した符号変調を加えた高パルス繰り返し周波数信号に対する受信パルスにについて相関処理を行い、その際、先に求めた周波数を中心とする限られた帯域についてのみ、反射波に対する時間軸方向の相関係数を算出するようにしたものである。
(もっと読む)
レーダセンサ前端用の時間二重化の装置及び方法
【解決手段】レーダシステム(25)及び対象物検出方法は、高い送信負荷時間率を維持しながら、対象物のレンジ及び任意である方位を決定する。波形発生器(30)は、送受信スイッチ(32,34)によりアンテナ開口に接続される。波形は、送信周期及び受信周期の合計の時間期間の半分より長い時間、送信される。周波数変調連続波(FMCW)波形に対して、受信器は、対象物から受信信号の少なくともナイキスト速度である速度で短い間隔でオンにすることができる。モノパルス又は周波数走査型アンテナを、レンジと同様に方位を決定するために使用することができる。  (もっと読む)
(もっと読む)
電子走査式レーダ装置
【課題】高精度な位相情報抽出が可能な電子走査式レーダ装置の提供
【解決手段】走行状態を検出する車輌走行状態検出部41、走行状態に応じて、計測範囲MRを距離L1,L2に対応した複数の距離領域AR1,AR2、AR3に区分し、それら各距離領域について切り出しデータ長M1,M2,M3を演算決定するデータ切り出し量決定部、各チャンネルのN個のデータからなる受信データRDを、各チャンネルについて切り出しデータ長M(<N)からなる短時間データXskに切り出す切出し部19、切り出された短時間データから位相情報を演算する位相情報生成部43を有し、演算された位相情報に基づいて、物標の距離、方位などを、距離に応じて方位分解能及び距離分解能を変化させた形で検出する。
(もっと読む)
レーダ装置
【課題】電力の微弱な目標の探知性能を向上できるレーダ装置を得る。
【解決手段】目標からの反射パルスを受信してA/D変換する受信手段1と、パルスヒット毎の受信、送信信号の相関をとるパルス圧縮手段2と、目標からの直接波とリピータを介した目標からの間接波とが存在するレンジビンを推定し、間接波が存在するレンジビンから直接波が存在するレンジビンへの積分路を決定する積分路探索手段3と、前記積分路に従って、レンジ方向にノンコヒーレント積分を実施するレンジ方向ノンコヒーレント積分手段4と、パルスヒット毎に得たレンジ方向ノンコヒーレント積分手段4の出力をヒット方向にノンコヒーレント積分を実施するヒット方向ノンコヒーレント積分手段5と、ヒット方向ノンコヒーレント積分手段5の積分結果を閾値処理し、閾値を越えたレンジビンに対して目標の検出とみなす閾値手段6とを設けた。
(もっと読む)
物標検出装置、物標検出方法、およびコンピュータが実行するためのプログラム
【課題】ピーク周波数成分が低周波領域に埋もれた状態から復帰してきた場合に、このピーク周波数成分が折り返しピーク周波数成分であるか否かを高精度に判定し、衝突寸前まで高精度な物標検出を行うことが可能な物標検出装置を提供することを目的とする。
【解決手段】本発明に係る物標検出装置は、FMCW方式を用いて検出した信号に周波数解析処理を施すことによって得られるピーク周波数成分のペアを用いて物標検出を行う第1の検出手段と、前記第1の検出手段と異なる方式で物標検出を行う第2の検出手段と、低周波数成分に埋もれていた前記ピーク周波数成分のペアの一方が復帰した場合、前記第2の検出手段の検出結果に基づいて、当該復帰したピーク周波数成分が折り返しピーク周波数成分であるか否かを判定する判定手段と、前記判定手段の判定結果に基づいて、前記第1の検出手段の物標検出方法を選択する選択手段と、を備えている。
(もっと読む)
非破壊探査装置及びその方法並びにプログラム
【課題】浅い位置に埋設された埋設物の位置及び形状の検出を従来例に比較して高い精度で行え、従来には行えなかった埋設物の材質の推定を行う非破壊探査装置を提供する。
【解決手段】本発明の非破壊探査装置は、送信波を発信し、反射波を受信するマイクロ波レーダ部と、反射波形から送信波形を減算して差分波形を求める差分計算部と、差分波形及び送信波形の相互相関のヒルベルト変換を行い、複素反射係数の絶対値のモデル適応度関数を得る相互相関ヒルベルト変換部と、モデル適応度関数の時間差の最大値及び最大値の時間差を保持し、所定の時間差幅の境界モデル適応度関数に変換する境界モデル適応度演算部と、測定点毎の反射波の境界モデル適応度関数を考慮点の信頼度とし、反射波の境界モデル適応度関数のヒストグラムにより逆投影画像を生成する逆投影像生成部と、逆投影画像にてヒストグラムの極大値を与える送信波形の位相を求める位相検出部とを有する。
(もっと読む)
レーダ装置
【課題】希望波以外の妨害波に対する自受信機のダイナミックレンジを拡大することのできるレーダ装置を提供。
【解決手段】信号処理部20にて検出される妨害波位相データを信号処理部20内の位相調整器28にてタイミングを調整し、さらにI/Q信号切替スイッチ42および直交変換器48において、位相0−πおよび位相π/2−3π/2の2つの位相変調を切り替えて、自装置10から発した送信波がターゲットにて反射した反射波である希望波を受信する際、複数のレーダ波が存在する場合、周辺の他のレーダ装置から発せられる最大妨害波のレベルを抑圧して、希望波以外の妨害波に対する自受信機のダイナミックレンジを拡大する。
(もっと読む)
順次到着時間差予測を利用した電波測距方法
【課題】多重経路、見通し外伝搬等による誤差を減少させて目標物体の位置を判別する。
【解決手段】相関間隔の間、窓関数をタイムシフトさせつつ、目標物体から一対のパッシブセンサで受信された一対の電波信号の内の第1の信号および第2の信号に上記窓関数を繰り返して適用して、各適用ごとに、第1の窓化信号および第2の窓化信号を生成する。第1の窓化信号は第2の窓化信号と相互相関されて、各相互相関ごとのピークを判別する。上記ピークを所定の閾値と時系列的に順次比較して、上記第1の信号における第1のパルスおよび上記第2の信号における第1のパルスを検出し、上記目標物体の位置を示す上記第1パルスの間の遅延を検出する。
(もっと読む)
401 - 420 / 573
[ Back to top ]