
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
381 - 400 / 573
モードS二次監視レーダ
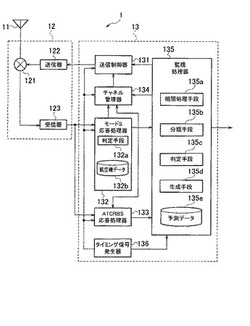
【課題】監視空域内に存在する航空機(トランスポンダ)を適確に捕捉し、航空機を安全に飛行させるモードS二次監視レーダを提供する。
【解決手段】質問を送信する送信制御手段131と、ATCRBS機及びモードS機から質問に対して送信された応答を受信する受信手段123と、受信した各応答が含む位置情報について相関を求める相関処理手段135aと、受信した応答を分類する分類手段135bと、相関処理及び分類の結果から、質問に対して受信したATCRBS応答がATCRBS機から送信されたものであるか否かを判定する判定手段135cと、判定の結果に基づいて監視空域を飛行する航空機の状態に関するレポートを生成する生成手段135dとを備える。
(もっと読む)
非等方拡散フィルタリング・アルゴリズムに基づいてSAR画像を処理する方法および装置
合成開口レーダー(SAR)画像を処理するコンピュータ・システム60は、処理されるべきSAR画像を記憶するデータベースと、データベースからのSAR画像を処理するプロセッサ69とを有する。前記処理は、処理されるべきSAR画像におけるノイズを判別する段階と、判別されたノイズに基づいて前記SAR画像についてのノイズ閾値を選択する段階と、選択されたノイズ閾値に基づいて非等方拡散アルゴリズムを数学的に調整する段階とを含む。調整された非等方拡散アルゴリズムをがSAR画像に適用される。 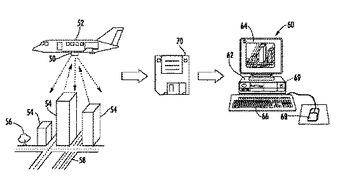 (もっと読む)
(もっと読む)
イベント検出装置

【課題】狭帯域信号を用いても、高精度にイベントを検出できるイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナ21によって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段22によって演算された相関行列を固有値展開して信号部分空間を張る固有ベクトルを演算する固有ベクトル演算手段23と、該固有ベクトル演算手段23によって演算された固有ベクトルの経時変化を検出してイベントを検出するイベント検出手段24と有するイベント検出装置。
(もっと読む)
空港面監視システムおよび空港面監視方法
【課題】空港面に存在する目標の誤検出を減少し、誤ターゲットの表示を抑制できる空港面監視システムを提供する。
【解決手段】ASDE10を用いたASDE追尾系統とMLAT20を用いたMLAT追尾系統を備え、MLAT追尾系統は、MLAT20が出力する目標位置検出情報に基づいて目標近傍の領域に対してはASDE追尾系統のビデオレベル判定部13のスレッショルドレベルを下げ、目標近傍以外の領域に対してはビデオレベル判定部13のスレッショルドレベルを上げるASDEビデオレベル判定用マップ情報205をビデオレベル判定部13に出力するスレッショルドMAP作成処理部23を有している。
(もっと読む)
画像レーダ信号処理装置
【課題】現地でのGCP測位の手間を省くことができる画像レーダ信号処理装置を得る。
【解決手段】アンテナ1、2の位置が格納されたアンテナ位置情報格納部3Aと、アンテナ1、2で観測して得られた第1、第2の画像が各々格納されたアンテナ1画像格納部3B、アンテナ2画像格納部3Cと、第1、第2の画像に基づき、第1の画像に対する第2の画像のスラントレンジ方向、アジマス方向の全画素のずれ量を求め、スラントレンジ方向のずれ量を距離差に変換し、アンテナ1の各画素の示す観測点の距離、及び前記距離差に基づき、アンテナ2の各画素の示す観測点の距離を算出する距離算出部4と、各アンテナの位置、アンテナ2の各画素の示す観測点の距離、及びアンテナ1の各画素の示す観測点の距離に基づき、三角測量により各画素の標高を求める三角測量部5と、三角測量部5により得た画像全体の標高分布を格納する出力格納部6とを設けた。
(もっと読む)
ターゲット識別装置
【課題】広帯域信号を用いて効率的に複数のターゲットについての識別情報を得る。
【解決手段】得られた受信信号に基づいて算出された粗決定サーチ関数F(Δτ)について、最大値探索部516において相関が最も大きい第1ターゲットを抽出し、その遅延時間τs1を検出する。次に、遅延時間τs1に基づいて、粗レプリカ生成部512において、第1ターゲットしか存在しないと仮定して得られる粗決定サーチ関数である第1ターゲット粗決定サーチ関数レプリカFrep1を生成する。減算部514において、粗決定サーチ関数F(Δτ)から、第1ターゲット粗決定サーチ関数レプリカFrep1を減算する。そして、最大値探索部516において、減算部514で得た減算結果の粗決定サーチ関数Fc1(Δτ)について、その中で相関が最も大きい第2のターゲットを抽出しその遅延時間Δτs2を検出する。
(もっと読む)
移動体の移動経路検出システム及び装身具
【課題】無線タグを用いた簡便な手法で移動体の移動経路を確実に検出し把握する。
【解決手段】生徒Hの移動経路内の異なる位置に設けられた複数の経路タグTkと、当該経路タグTkの情報を読み取るために生徒Hが所持する携帯リーダ1とを有する移動体の移動経路検出システムS1であって、携帯リーダ1は、無線通信を介し経路タグTkより経路タグIDを複数の異なるタイミングで取得可能なタグ検出用アンテナ4を有し、生徒Hの移動に伴って取得される複数の異なるタイミングにおける情報取得結果に基づいて生徒Hの移動経路を算出する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の機動の種類が等速旋回の場合には目標の針路は変化するが速さは一定であり、機動の種類が等速旋回直進加減速の場合には目標の速さは変化するが針路は一定であるが、従来の方法では、変化する諸元の追従の遅れの回復を早める一方、一定である諸元の誤差が大きくなることが課題であった。
【解決手段】目標の機動を検知時に目標諸元誤差予測値を大きめに調整する際に、機動の種類と目標の針路を考慮して、目標諸元誤差予測値を、変化している諸元の方向に大きめに、一定の方の諸元の方向に小さめに調整することにより、変化する諸元の追従の遅れの回復を早めながら、一定である諸元の誤差の増大を避けることを可能にする。
(もっと読む)
防犯システム、それに用いる携帯端末及び防犯サーバ
【課題】不審者を検出して行動を監視すると共に、利用者に状況を報知することにより利用者が早めに対応できるようにし、さらに不審者の行動を控えさせる防犯システム、それに用いる携帯端末及び防犯サーバを提供する。
【解決手段】携帯電話機10は、不審者の検出機能を有しており、不審者を検出した場合、その検出情報を基地局2とネットワーク3を介して、防犯サーバ4に送る。防犯サーバ4は、犯罪者データベース5より不審者検出情報に基づいて該当する犯罪者を検索する。該当者がいた場合には、警備組織の端末6にその情報を通知する。
(もっと読む)
エコー信号に基づく情報取得装置及びレーダ装置並びにパルス圧縮方法
【課題】エコー信号に基づく情報取得装置に用いられるパルス圧縮方法において、サイドローブを発生せず、かつ、圧縮パルス幅を自由に設定できるようにする。
【解決手段】レーダの受信機は複数のフィルタ8を備え、各フィルタ8は第1フィルタ11と第2フィルタ12とを備える。第1フィルタ11の周波数応答関数W(f)は、送信波形s(t)のフーリエ変換をS(f)、期待出力波形d(t)のフーリエ変換をD(f)としたときに、D(f)/S(f)で表される。そして、前記期待出力波形d(t)のパルス長が、送信波形s(t)のパルス長よりも短く設定されている。第1フィルタ11の出力波形は、帯域制限のための第2フィルタ12を通過するように構成されている。また、送信パルス信号のパルス幅及び繰返周波数の少なくとも何れかの変更に応じてフィルタ8が切り換えられ、これにより、信号を通過させる第1フィルタ11の周波数応答関数が変更される。
(もっと読む)
マルチセンサ制御システム
【課題】種類の異なる複数のセンサを適切に制御して、観測を行う。
【解決手段】センサ200a〜200cが出力した探知データを、データ相関・統合部120が入力し、相関・統合して目標情報を生成する。センサ制御方法決定部150は、センサ情報設定・管理部170が記憶したセンサの能力や、制御ルール設定・管理部180が記憶した制御ルールに基づいて、目標情報からセンサ制御方法を決定する。センサ制御方法決定部150が決定したセンサ制御方法に基づいて、制御コマンド発行部190がセンサ200a〜200cに対して、センサ制御コマンドを送信する。
(もっと読む)
レーダ装置
【課題】温度変化や経年変化によらず到来波数を安定した精度で推定可能なレーダ装置を提供する。
【解決手段】受信信号遮断状態のデータDaを取得し、当該装置の内気温度Tcを測定し、データDaをFFT処理することで、回路ノイズ分を表すパワースペクトルPSaを算出し、次式に従って、パワースペクトルの周波数[bin]毎に、ノイズ閾値TH(n)を算出する(S210〜S240)。但し、αは係数(0<α<1)、TH(n−1)は前サイクルで算出されたノイズ閾値である。
TH(n)=(1−α)×TH(n−1)+α×(PSa+Poffs+K×Tc)
このノイズ閾値TH(n)を用いて、パワースペクトル中のピークの検出、方位推定で使用する固有値の識別を実行する(S260〜S270)。
(もっと読む)
電波探知装置
【課題】同一種類のレーダ機器が複数種類の航空機や船舶に搭載されることが多いため、探知目標の情報と既知のプラットフォーム情報のみから搭載母体(プラットフォーム)を推定することは困難であった。
【解決手段】レーダ機器より発射された到来電波を分析し、この分析結果とレーダ波諸元ライブラリを比較照合してレーダ機器を推定するレーダ波電波諸元識別照合回路4と、同じ搭載母体の通信機器より発射された到来電波を分析し、この分析結果と通信波諸元ライブラリを比較照合して通信機器を推定する通信波電波諸元識別照合回路8と、推定したレーダ機器と通信機器の両方の情報をプラットフォームライブラリと照合するプラットフォーム識別回路10とを設け、プラットフォーム識別の確実性を向上させたものである。
(もっと読む)
電波妨害システム
【課題】電波妨害装置においては自己の妨害送信状況の確認が実施できず、電波妨害による自己防御の度合いの把握が困難であった。
【解決手段】目標航空機11からのレーダ波14を受信した自機航空機12は、電波妨害信号15を送信すると共に、データリンク3を介して僚機航空機13に対して自機航空機12が送信した電波妨害信号15の受信を指示し、僚機航空機13は指示に基づき電波妨害信号15を受信しその電波諸元を検出して、データリンク3を介して送られた電波妨害信号情報との相関を取ることにより電波妨害信号による妨害状況を判定し、その結果をデータリンク3を介して自機航空機12側に伝送することにより自機航空機側で電波妨害による自己防御の度合いの把握ができるようにした。
(もっと読む)
センサのバイアス誤差推定装置
【課題】バイアス誤差を、センサを中心とした直交座標系においてオイラー角で定義する場合、バイアス誤差推定方式で定式化した際に観測行列の階数が足りず、正則とならないため、3次元の位置の観測値だけではバイアス誤差を推定することができない。
【解決手段】センサで観測した3次元の観測値からX、Y、Z軸の回転角のうち、1軸バイアス誤差補正器5により、1軸の回転角について取り得る範囲で複数パターン想定し、あらかじめ1軸の回転角のみ補正した観測値を求め、この補正後の観測値を用いて、2軸バイアス誤差補正器7により残りの2軸の回転角を推定する。2軸バイアス誤差補正器群8で推定した2軸の回転角と、1軸バイアス誤差補正器5で補正した1軸の回転角を1つの組合せとして、その中から最適なX、Y、Z軸の回転角を選択する推定値評価器9を設けて、バイアス誤差を推定するようにした。
(もっと読む)
モードS二次監視レーダ
【課題】監視空域内に存在する航空機(トランスポンダ)を適確に把握し、航空機を安全に飛行させるモードS二次監視レーダを提供する。
【解決手段】質問に対する応答を受信するとともに、航空機から送信されるモードS拡張スキッタを受信する受信器123と、応答を受信すると、応答とモードS拡張スキッタとの相関値を求める相関処理手段135bと、相関値に基づいて、応答を送信した航空機をロールコール質問/応答による監視対象とするか否かを判定する有効判定手段135cと、航空機がロールコール質問/応答による監視対象とすると判定されると、航空機のモードSアドレスを含むレコードを登録機データに追加する更新手段135aとを備える。
(もっと読む)
レーダ信号処理装置
【課題】クラッタおよび妨害を抑圧するとともに、メインローブを保持して高い抑圧性能を得ることができるレーダ信号処理装置を提供する。
【解決手段】主アンテナ11から出力される信号をビーム合成するビーム合成回路2と、ビーム合成回路の出力をフーリエ変換して主チャンネル信号を生成するフーリエ変換回路3と、補助アンテナ12から出力される補助チャンネル信号から、フーリエ変換回路から出力される信号の振幅および位相を、該補助チャンネル信号の振幅および位相に合わせた信号を減算する拘束付補助ビーム形成回路6と、拘束付補助ビーム形成回路から出力される信号を用いてタップドディレイラインによるアダプティブ処理を行うアダプティブ処理回路4と、主チャンネル信号から、アダプティブ処理がなされた信号を減算することにより主チャンネル信号に含まれる不要波を抑圧するキャンセル処理回路5を備える。
(もっと読む)
レーダ画像処理装置
【課題】地表面で生じた変化を高精度に検出でき、変化の状態に応じて類別できるレーダ画像処理装置を得る。
【解決手段】異なる時刻に撮像された複数のレーダ画像を格納するレーダ画像格納部1と、レーダ画像間の複素相関であるコヒーレンスを算出するコヒーレンス算出部200と、レーダ画像間の位相差を算出する位相差算出部300と、画素を中心とする所定の範囲毎に位相差の統計分布を算出する統計分布算出部400と、算出されたコヒーレンスに基づき位相差の理論的な統計分布を算出する理論統計分布算出部500と、算出された統計分布と理論的統計分布と比較し統計分布間の差異を示す統計パラメータを算出する検定部600と、地表面の変化検出のための閾値を入力する閾値指定部700と、算出された統計パラメータと入力された閾値とを比較し、前記閾値を超えた箇所を地表面上の変化があった箇所として検出する検出処理部800とを設けた。
(もっと読む)
スペクトル拡散型レーダ装置用半導体装置
【課題】能動素子の非線形成分に起因した虚像信号を抑制したスペクトル拡散型レーダ装置用半導体装置を提供する。
【解決手段】スペクトル拡散型レーダ装置用半導体装置(逆拡散変調部133)は、(a)結合線路(線路162a,162b)と結合線路(線路162c,162d)とから構成され、不平衡信号として入力した受信信号を一対の平衡信号に変換する不平衡平衡変換回路162と、(b)1以上のトランジスタから構成されるスイッチ回路(トランジスタQ1,Q2,Q3,Q4)を有し、擬似雑音符号と同一の符号系列の擬似雑音符号が差動信号として入力し、不平衡平衡変換回路162から出力された一対の平衡信号が入力し、差動信号として入力した擬似雑音符号を使用して、一対の平衡信号をスイッチ回路によって逆拡散するバランス型逆拡散回路161とが同一の半導体基板上に形成されている。
(もっと読む)
調整方法及び方位検出装置及び電子機器
【課題】方位検出装置が有するアレーアンテナの向きを、設置対象に対して所定の向きに正確に調整することができるようにする。
【解決手段】レーダ装置は、レーダ波を発射すると共に、レーダ波が物体に反射して戻ってくる各到来波をアレーアンテナで受信し、この受信信号に基づき、到来波の方位を検出する。具体的に、レーダ装置は、通常モード動作時、到来波数を推定して(S170)、各到来波の方位を検出し(S200)、この検出結果を、検査ツールに提供する。一方、レーダ装置は、軸調整モード動作時、到来波数を推定せずに、到来波数が予め設定された固定値であるとして(S180)、各到来波の方位を検出し、この検出結果を、検査ツールに提供する。作業者は、向き調整の際、検査ツールを通じてレーダ装置を軸調整モードで動作させると共に、レーダ装置の方位の検出結果を、検査ツールに表示させ、この表示内容に基づき、レーダ装置の向きを調整する。
(もっと読む)
381 - 400 / 573
[ Back to top ]