
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
481 - 500 / 573
擬似直交波形レーダシステム、2次多相波形レーダ、およびターゲット位置決定方法
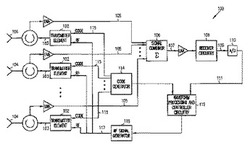
擬似直交波形の実施形態では、レーダシステム100は擬似直交波形を送信し、組合わせられた単一の受信機チャンネル信号で多重の相関を行う。2次多相波形の実施形態では、レーダシステム100は複数の送信アンテナにおける単一の2次多相波形の周波数分離されたバージョンを同時に送信し、各アンテナからの反射信号を組合わせて時間ドメイン信号を生成し、ターゲットの位置を突き止めるために組合された時間ドメイン信号でフーリエ変換を行う。レーダシステムは狙撃者の銃弾、入来する発射体、ロケット推進擲弾(PRG)、または迫撃砲の弾丸のようなターゲットを識別することができる。ある実施形態では、システムはターゲットの弾道を評価し迎撃することができる。実施形態ではシステムはターゲットの弾道を評価し、さらに狙撃者のようなターゲット源の位置を突き止めるためにターゲットの弾道を外挿することができる。 (もっと読む)
電波送受信器における電波干渉回避装置

【課題】 演算部を含む電波送受信器における電波干渉回避装置であって、発振周期の乱れによる影響を該演算部に極力を与えないようにして、干渉波の発振タイミングに対して自己の発振タイミングをずらし、干渉を回避する。
【解決手段】 干渉波による干渉の発生を検出する手段10によってその干渉を検出したときのみ、一周期の長さを変更し、自己の発振タイミングを干渉波の発振タイミングに対して相対的にずらすタイミング制御手段20を備える。
(もっと読む)
インプラント、体内のインプラントの位置を求める装置および方法
【課題】体内におけるインプラントの位置の特に簡単かつ正確な検出を可能にする。
【解決手段】第1の座標系に割り付けられた画像データセットであって、少なくともインプラントを含んでいる体部分の第1の画像を作成するための画像データセットを取得する撮影装置(C)と、トランスポンダへ電磁的な一次放射を送出する送信器(A1)と、一次放射によりトランスポンダから放出された二次放射を受信する受信器(A1,A2)と、二次放射に基づいて第2の座標系におけるトランスポンダの位置を求める位置検出装置(A)と、第1の座標系と第2の座標系とを相関させる相関手段(F1)と、第1の画像およびトランスポンダの位置を再現する第2の画像を作成する画像作成手段(F3)とが設けられている。
(もっと読む)
道路形状認識装置
【課題】 デリニエータが路側帯に存在しているか否かに拘わらず、現在の走行位置における道路曲率と前方の道路曲率とが異なっていたり、操舵にふらつきがあったりしても、正確に道路形状を認識することができるようにする。
【解決手段】 物体のドップラー速度と自車両の速度を比較して、当該物体が静止物体であるか否かを識別する静止物抽出部32と、その静止物抽出部32により静止物体であると識別されている物体の中から道路形状の推定に適している有効な静止物体を抽出する有効静止物抽出部36とを設け、その有効静止物抽出部36により抽出された物体の位置を道路形状推定式に当て嵌めて道路形状を推定する。
(もっと読む)
位相測定原理による距離測定のための複数を目標とする方法
標本値を生成し任意に保存するために、周期的な信号(7)の時間離散放射と、受信信号のサンプリングを用いた、位相測定原理による距離測定方法において、目標物(2a、2b)までの距離が同時に決定され、それによって信号は目標物(2a、2b)によって反射され重ね合わされた信号部分を有する。数学的な信号モデルに基づいた統計的なパラメータ概算問題は、一つ以上の目標物(2a、2b)に対する目標値(2a、2b)の数がプリセットされ、又は根本的に目標物の数が上記方法によって決定され、不等式
【数1】
と
【数2】
が成立することによって解決される。
プリセットされた距離
【数3】
と
【数4】
ここで
【数5】
が、距離測定装置の測定範囲にセットされる。  (もっと読む)
(もっと読む)
レーダ装置
【課題】捜索範囲が広く小目標の場合であっても、高い捜索レートで捜索して目標を検出することができるレーダ装置を提供する。
【解決手段】捜索範囲のうちの所定領域に対する所定ヒット数の送受信信号をウェーブレット変換することにより得られた展開係数に基づき目標を検出する第1目標検出部5と、所定領域以外の領域に対する所定ヒット数より多いヒット数の送受信信号に対して不要波抑圧処理および積分処理を含む信号処理を施すことにより目標を検出する第2目標検出部6とを備える。
(もっと読む)
レーダ装置
【課題】 到来方向推定処理において、分解能を高めるために過去情報を用いると、演算量が莫大に増加する問題がある。
【解決手段】 アレイ状の受信手段と、前記受信手段により受信した前記反射波に基づき、前記アレイ毎のビート信号を各々生成する受信部と、複数の前記ビート信号に基づき相関行列を演算する相関行列演算手段と、複数の前記相関行列を記憶する記憶手段と、前記相関行列演算手段により演算される複数の前記相関行列と、前記記憶手段に記憶された所定時間前の複数の相関行列とを加算した加算相関行列を複数演算し加算相関行列群として出力する加算手段と、前記ビート信号を用いて所定条件を満たす周波数を検出する検出手段と、前記加算相関行列群の中から、前記周波数に最も近い加算相関行列を抽出行列として抽出する抽出手段と、前記抽出行列を用いて前記レーダ装置から前記検出対象物に対する方向を演算する。
(もっと読む)
相関受信処理装置
【課題】相関処理におけるサイドローブ抑圧を高い性能で実現すると共に分解性能を向上させS/Nロスを最小化できる相関受信処理装置を提供する。
【解決手段】一定の時間幅と形状をもつ信号を受信する受信装置に設けられ、この信号を受信信号として相関受信を行う相関受信処理装置であって、上記受信信号を相関受信した波形の主ローブのピーク中央およびその両側に存在する複数のサンプル点を除くすべてのサンプル点のサンプル値を0にし、且つ主ローブのピーク中央のサンプル値におけるS/Nロスを最小にするような係数ベクトルを算出するフィルタ係数演算部30と、フィルタ係数演算部で算出された係数ベクトルに従って受信信号を相関受信するフィルタ40とを備えている。
(もっと読む)
レーダ装置
【課題】 2周波CWモノパルス方式のレーダ装置において、移動する人からの反射波はドップラ信号の周波数スペクトルに先鋭なピークを生じにくく検出しにくい。
【解決手段】 2つの受信部によりLチャンネル、Rチャンネルのドップラ信号を取得する。各チャンネルの2周波の送信波に対するドップラ信号からLチャンネルの距離情報350,Rチャンネルの距離情報352を取得する。周波数毎に両距離情報の差の絶対値354を求め、その絶対値が所定の閾値DErrを越える帯域358はノイズ信号を含むものとして除去し、物体からの反射波に基づくドップラ信号を含む有効周波数帯域を取得する。同様に、両チャンネルのドップラ信号に基づいて、反射波の到来する角度情報を送信周波数に対応して2種類取得し、それらの相関に基づいて有効周波数帯域を抽出する。取得した有効周波数帯域の情報に基づいて移動物体の検知、位置等の測定を行う。
(もっと読む)
測角装置
【課題】ウェーブレット変換を用いるレーダ装置であっても、ビーム幅内における目標が存在する方向を測角できる測角装置を提供する。
【解決手段】入力信号に対してウェーブレット変換を施すことにより得られたウェーブレット展開係数に基づき目標を検出する目標検出部20と、目標検出部20において目標が検出されたビームポジションにモノパルスビームを送受信してモノパルス測角を行う測角部30とを備えている。
(もっと読む)
車両の周辺監視装置
【課題】 レーダ装置を駐車支援と追突検知に兼用しながらも、運転者が意識しなくとも様々な状況下でレーダ装置から必要な出力信号を適切に獲得できる車両の周辺監視装置を提供する。
【解決手段】 車両外部へ向けて検出電波を発信する発信手段1と、外部物体からの反射電波を受信する受信手段2と、検出電波と反射電波に基づいて外部物体を検出する信号処理手段3とを備えたレーダ装置4と、前記レーダ装置4を駐車操車時の支援モニタとして動作させる駐車支援モードと走行操車時の追突検知モニタとして動作させる追突検知モードの何れかの動作モードに切替設定するモード設定手段5を備えた車両の周辺監視装置であって、前記モード設定手段5は、運転姿勢データや車速データ等に基づく車両状態データに基づいて前記レーダ装置を駐車支援モードと追突検知モードの何れかに設定する。
(もっと読む)
航跡相関統合装置
【課題】目標情報のより状況認識を行い易い表示を提供できる航跡相関統合装置を得る。
【解決手段】最初の航跡相関統合は、レーダ航跡生成部1で生成された航跡と角度センサ航跡生成部2で生成された航跡の全ての組合せの相関の尤度を計算して航跡同士の組合せの相関の有無を判定し、2回目以降の航跡相関統合は、レーダ航跡生成部1及び角度センサ航跡生成部2で生成された航跡と既存のグループの相関の尤度を計算して前記航跡と前記グループとの相関の有無を判定する航跡相関部3と、航跡相関部3により相関有りと判定された航跡同士、又は航跡と既存のグループは必ず同一のグループに入るようにグループ化し、グループの中心位置と広がりを計算するグループ処理部4と、1対1対応がとれた航跡群は統合航跡を表示し、1対1対応がとれない航跡群は前記グループの中心位置と広がりに基づきグループを楕円で表示する統合航跡・グループ表示部6とを設けた。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
共分散行列算出方法、ウェイト算出回路、アダプティブアレイアンテナ、及びレーダ装置
【課題】 本発明は、適応ウェイト算出の処理量を短縮することが可能な共分散行列算出方法を提供する。
【解決手段】 本発明の共分散行列算出方法は、アンテナ(#1〜#M)を介して受信される目標反射信号を、データ蓄積部3に受信タイミングに対応させて記憶する。
データ蓄積部3は、所定長さ(N個)の処理レンジセルに対応するメモリを有し、その処理レンジセルを時間軸上で複数(Q)個に分割し、この分割された各区分内で、その区分内のレンジセルにおける共分散行列を算出する。
従って、N個の全処理レンジセルにおける共分散行列算出の複素演算は、スライディングウィンドウ方式による各レンジセルにおいて行った従来の共分散行列の算出回数(N回)と対比して、算出回数は(N/Q)回となるので、演算量を大幅に削減できる。
(もっと読む)
レーダ装置
【課題】増幅管の個体差や送信系の特性変化に依存せずにスプリアスを容易に低減する。
【解決手段】RF送信信号を送信信号解析部17−1に分配供給し、RF送信信号の波形を解析して、その解析結果に基づいてスプリアスが低減されるIF送信信号の波形データを作成し、IF送信信号発生部11にそのデータを入力する。送信信号解析部17−1で作成されたIF送信信号の波形データは、周波数変換部12から電力増幅部13の出力までの周波数特性を補正したIF送信信号となるため、電力増幅部13から出力されるRF送信信号は、スプリアスが低減された信号となる。
(もっと読む)
形状測定装置及び該方法
【課題】 本発明は物体形状をより精度よく求め得る形状測定装置及び該方法を提供する。
【解決手段】 本発明の形状測定装置は、送信パルスを生成する信号生成部11と、送信パルスを空間に放射する送信アンテナA1と、送信パルスの放射位置で物体反射の送信パルスを受信する受信アンテナA2及び信号受信部12と、物体に対して送信アンテナA1の位置を変えながら送信パルスを放射して得た複数の受信信号と参照信号とから複数の相関波形を求める相関部131と、複数の相関波形に基づいて擬似波面を抽出する擬似波面抽出部132と、擬似波面と物体形状との対応関係から物体形状を推定する形状推定部133と、推定物体形状に応じた受信信号波形を推定する波形推定部134とを備え、参照信号波形として最初は送信パルス波形を用いると共に次回以降は推定した受信信号波形を用い、物体形状を複数回推定することで物体形状を求める。
(もっと読む)
スペクトラム拡散信号復調装置、スペクトラム拡散信号復調方法、及び電波発生源可視化装置、電波発生源可視化方法
【課題】 スペクトラム拡散信号のような電力密度の弱い信号を検出するため、拡散コードを推定して逆拡散し、電波発生源を容易に特定し可視化することを可能にする。
【解決手段】 スペクトラム拡散方式の信号を受信し、周波数変換してデジタルデータに変換するA/D変換部と、基コード信号(親コード)を発生し、その基コード信号の一部を修正して修正コード信号(子コード)を生成し、基コード信号と修正コード信号を用いてデジタルデータの逆拡散処理を行い、逆拡散後の受信信号レベルが良好なコード信号を新たな基コード信号として交代させ、順次修正を繰り返して拡散コードを推定し、推定した拡散コードによってデジタルデータを復調する逆拡散処理部と、を具備してなる。
(もっと読む)
レーダ装置
【課題】 モノスタティックレーダ局とバイスタティック受信局の片方もしくは両方が異なる移動プラットホーム上にある場合でも精度よく目標の位置や速度を推定することができるレーダ装置を提供する。
【解決手段】 モノスタティックレーダ局50のドップラ周波数A算出手段4により算出されたアンテナ1と目標40の間におけるドップラ周波数A及び送信周波数を通信手段5及び通信手段9を介してバイスタティック受信局51にリアルタイムに送り、これとバイスタティック受信局51において受信し計測した周波数情報とからドップラ周波数B算出手段10によりアンテナ6と目標40との間におけるドップラ周波数Bを算出する。
(もっと読む)
対象を認識して分類する方法および装置
対象を認識して分類する方法と装置であって、その場合にセンサによって電磁的放射が送信されて、対象で反射された部分放射がセンサによって受信され、受信された信号が、格納されている特徴的な値との比較によって評価されて、評価に基づいて反射する対象の分類が推定される。そのために、受信信号を評価するための評価手段が設けられており、特徴的なパターンを格納するためのメモリが設けられており、そのメモリに格納されたパターンが評価された信号と比較されて、比較に基づいて反射する対象の分類を推定することができる。 (もっと読む)
センサ信号処理システム
【課題】 信号源数を正しく推定し目標検知性能及び追尾維持性能を向上させる。
【解決手段】 分解可能軌跡予測部108は前回時刻において分解可能であると予測された追尾中の信号源の追尾情報から、信号源数仮説毎に追尾中の信号源が現在時刻において分解可能であるかを判定し、離反信号源判定部109は前回時刻において分解不能であると予測された追尾中の信号源の追尾情報と現在時刻において抽出された観測値から、信号源数仮説毎に追尾中の信号源が離反したか否かを判定し、相関決定部110は分解可能軌跡予測部108及び離反信号源判定部109の判定結果に基づき、追尾中の信号源と現在時刻において抽出された観測値との相関を決定する。
(もっと読む)
481 - 500 / 573
[ Back to top ]