
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
521 - 540 / 573
無線センシング装置及び無線センシング方法

【課題】 車載レーダ等の各種センシング装置において、コストの上昇及び消費電力の増大を低く抑えながらも距離精度を高めることができると共にセンシング距離を長くすることができるようにする。
【解決手段】 無線周波数帯の信号を発振する発振器101を間欠的且つ発振動作期間を変えて発振動作させ、発振動作期間の信号を送信アンテナ503より空中へ放射すると共に、空中へ放射した送信波が被測定物1000を反射して戻ってくる反射波を受信アンテナ504にて受信し、受信した反射後と先に送信した送信波とに基づいて被測定物1000に対する距離を求める。これにより、送信ピーク電力を高くすることなく近距離における高い距離分解能の無線センシングと遠距離の無線センシングの性能を実現することが可能となる。
(もっと読む)
無線受信機におけるDCオフセット補正装置及び方法

【課題】 効率よく正確にDCオフセットを算出し、受信信号を補正して、受信利得の劣化を防止することができる、無線受信機におけるDCオフセット補正装置及び方法を提供する。
【解決手段】 無線受信機における受信信号に対してDCオフセット成分を除去する補正を行う装置が、DCオフセット成分算出対象範囲の中心となる基準値を決定する基準値決定部28と、その基準値決定部28によって決定された基準値を中心に一定の範囲幅を設定することにより、DCオフセット成分算出対象範囲を指定する範囲指定部30と、その範囲指定部30によって指定された範囲内に存在する受信信号に基づいてDCオフセット成分を算出し、受信信号全体から該DCオフセット成分を減算するDCオフセット減算部32と、を具備するように構成される。
(もっと読む)
二次監視レーダ制御装置及び二次監視レーダ制御方法
【課題】航空機を確実に捕捉可能な二次監視レーダ制御装置及び二次監視レーダ制御方法を提供する。
【解決手段】 航空機の未来位置範囲が所定の切替値以下である場合、質問信号の単位時間あたりの送信回数を定めた送信回数基準値に則り質問信号を送信させ、未来位置範囲が基準値以上である場合、基準値に定められた値より減じた回数で質問信号を送信させる送信制御部91を設ける。
(もっと読む)
不要波抑圧装置
【課題】 アンテナのサイドローブだけでなく、主ビーム方向やそれに近い方向から入射するクラッタなどの不要波を十分に抑圧することができる不要波抑圧装置を得ることを目的とする。
【解決手段】 ディジタルマルチビーム形成部5により形成された受信ビームのビーム信号を複数の帯域に分割するDFB6−nと、そのDFB6−nにより分割された複数のビーム信号に荷重計算部10により計算された荷重を乗算し、荷重乗算後のビーム信号を足し合わせて不要信号のレプリカを生成する加算器14等とを設け、そのDFB6−nにより分割された複数のビーム信号の中から主ビーム方向に対応している注目帯域のビーム信号から不要信号のレプリカを減算する。
(もっと読む)
乱気流を遠隔的に測定するシステム
乱気流を検知するシステム及び方法は、数台の移動プラットフォームと、移動プラットフォーム速度センサと、数台の電磁エネルギー送信器及び受信器とを含む。受信器は、送信器によって送信されたエネルギーを、乱気流を被る経路沿いに進んだ後に、受信する。受信器は、乱気流によって生じるエネルギーの変化を検知し、(送信器または受信器のいずれかが配置された)移動プラットフォームの速度の効果を変化から選別する。加えてシステムは、の3次元モデルを作成できる。別の実施形態において、本発明は移動プラットフォームを使って乱気流を検知する方法を提供する。方法は、乱気流を被る経路に沿って進んだ電磁エネルギーを受信することと、乱気流によって生じたエネルギーの変化を判定することとを含む。好ましくは受信器が配置される移動プラットフォームの速度の効果は変化から選別される。  (もっと読む)
(もっと読む)
レーダ信号処理装置
【課題】 船舶などの目標を正確に検出することができるレーダ信号処理装置を得ることを目的とする。
【解決手段】 ASDEから出力されたレーダビデオのスレッショルドレベルを算出し、そのスレッショルドレベルより大きい振幅を有するレーダビデオを検知するヒット検定処理部6を設け、ヒット検定処理部6により検知されたレーダビデオに含まれているクラッタを縮小化する収縮処理を実施し、収縮処理後のレーダビデオに対する2次元移動平均処理を実施してノイズレベルを算出し、そのレーダビデオとノイズレベルを比較して目標とクラッタを区別する。
(もっと読む)
距離測定装置
【課題】 距離測定の精度を向上させた距離測定装置を提供する。
【解決手段】 測距ユニット100−1は、測距対象物400までの距離を測定するものであって、インパルスを発生するインパルス発生回路106と、このインパルスを送信する送信アンテナ112と、送信アンテナ112から送信されて測距対象物400で反射したインパルスの反射信号と、送信アンテナ112から送信されたインパルスの漏洩信号とを受信する受信アンテナ114と、反射信号と漏洩信号との時間差に基づいて、対象物までの距離を算出するコントローラ102とを有する。
(もっと読む)
レーダー装置のマルチパスによる疑似目標の判定方法及びこの判定方法を用いたレーダ監視装置
【課題】 レーダーの受信信号に含まれる不要信号のうち、レーダーから目標へ引いたいわゆるレーダー視線上の遠方側(レーダーと反対側)に発生するマルチパスエコーによる擬似目標を誤目標として識別する適当な方法がなかつた。
【解決手段】 得られた目標情報と、既に追尾している追尾目標とを1対1に対応付ける相関処理を行なう相関処理手段81を設ける。そしてどの追尾目標とも対応がない目標情報は新たな追尾目標とする。一方、レーダー視線上の目標情報の手前側(レーダー側)に既存の追尾目標4が存在し、尚且つ、当該目標情報を仮の追尾目標として追尾した結果が、マルチパスエコーによる擬似目標の固有のパターンを示すか否かを判定するマルチパス判定手段82を設け、固有のパターンを示すと判定した場合は、誤目標として棄却する。
(もっと読む)
電波探知装置
【課題】 目標からの電波の周波数の同調に要する時間を短縮すること可能にする。
【解決手段】 到来が予測されるプラットフォームの種類を含む情報を所定の通信情報網から受信した場合に、到来電波予測同調制御手段により、プラットフォームの種別、搭載レーダの種別、レーダの電波諸元を格納するプラットフォームライブラリから、該当するプラットフォームの搭載レーダの電波周波数を抽出し、その周波数への同調を指示する同調制御信号を出力し、受信機同調手段は、通常時の掃引動作中に受けた同調制御信号で指示された周波数に優先的に同調し、目標からの電波を捕捉して電気信号を取り出し、受信信号諸元測定手段により、捕捉した目標の電波諸元を計測分析し、その電波諸元に基づいてプラットフォームライブラリを照合してレーダの種類を特定する。
(もっと読む)
同一航跡判定装置
【課題】航跡作成装置が異なるセンサであっても、処理負荷を削減し、なおかつ、それまでに得られた信頼度を蓄積し、多くの航跡が密集した状態等、位置運動情報(航跡間の距離及び速度)に差がつかない状況においても、安定した確度の高い相関結果を得ることのできる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の位置相関判定器7に目標類識別データ選択器11および目標類識別相関判定器12を取りつけ、位置相関判定で絞り込まれた相関の可能性がある航跡対を、目標特徴量から類推される目標類識別結果を用いてさらに絞り込む。次に従来の同一航跡判定装置の尤度算出器14に信頼度算出器15を、信頼度算出器15に信頼度記憶器16を取りつけ、航跡データ対についての信頼度を尤度算出器14で算出された尤度、及び信頼度記憶器16に記憶されている1サンプリグ前の信頼度を用いて算出する。
(もっと読む)
定在波レーダ装置及び定在波レーダの相対速度距離測定方法
【課題】相対速度を測定する時間領域と距離を測定する時間領域とを時間的に分割して、より正確に測定対象までの距離と相対速度を測定することのできる定在波レーダ装置を提供する。
【解決手段】本発明の定在波レーダ装置1では、相対速度を測定する時間領域では所定周波数の送信信号が発振器2によって発振され、距離を測定する時間領域では周波数を段階的に変化させた送信信号が発振される。送信器3はこの送信信号を送出し、定在波を受信器4が検出する。そして、信号処理器5が定在波の振幅値の時間変動に基づいて相対速度を算出し、周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、相対速度の値を使用して算出された距離の誤差を補正する。
(もっと読む)
干渉型レーダー
【課題】一般のレーダーと異なり、送信信号はパルスではなく、CWまたはFMCW信号であるため、レーダー用ではない一般通信用の送信モジュールを使用することができる。
【解決手段】目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する受信部Rとを有している。前記送信部Tは、目標対象物の方位及び速度を検出するためのCW信号を送信アンテナ7から出力する。前記受信部Rは、前記送信部Tからの送信と同時に、目標対象物で反射した反射波を複数台の受信アンテナ8で受信し、受信信号に対してスペクトル解析を行い速度成分ごとの受信信号に分類する機能と、受信アンテナ系統の信号間の相関する機能と、前記相関処理された信号を積分する機能と、受信アンテナ間の信号の位相差からアンテナ面に入射する信号の位相面を求めて、その出力を2次元FFTしてターゲットの方位方向及び速度を計測する機能とを実行する。
(もっと読む)
パルス圧縮装置、探知装置およびパルス圧縮方法
【課題】比較的短い循回型バイナリコードを用いて、且つサイドローブを抑圧したパルス圧縮方法を実現する。
【解決手段】 送信パルスに対応するエコー信号のパルス圧縮後の信号、すなわちパルス圧縮信号が時間軸上で所定の広がりを有するように、前記送信パルスを形成するためのバイナリコードを設定する。この際、パルス圧縮信号の時間軸上の幅はバイナリコードを構成する単位であるチップコードの時間幅の複数個分に相当する長さとなるように設定する。このように、パルス圧縮信号の時間幅を長くすることで、周波数スペクトルが分散せず、メインローブにのみパワーが集中してサイドローブが抑圧される。
(もっと読む)
障害物検知装置
障害物検知装置は、所定の広がり角を有するビームを複数の異なる方位に向けて順次的に放射し、各方位における障害物からの反射波を受信することにより、各方位についてビームの放射角度範囲内に存在する障害物を検知する障害物検知部(11)と、障害物検知部から出力される各方位についての反射波の受信信号に基づいて、それぞれの方位における障害物と自車両との間を代表する距離を算出する距離算出部(12)と、距離算出部で算出された各方位についての距離を画像作成基準として扱うことにより、各方位に放射されたビームの放射角度範囲内において2次元的に展開された図形を障害物画像として作成し、当該障害物画像を表示するための画像データを生成して出力する障害物画像作成部(14)と、障害物画像作成部によって作成された画像データを受け取り、障害物と自車両との位置関係を示す画像を表示する表示部(15)とを備える。  (もっと読む)
(もっと読む)
電子測定方法
本発明よると、電子測定方法の感度は、少なくとも一つのパルス受信周波数を有するパルス電磁放射(ES)の送信、受信信号に変換される反射散乱放射(RS)の受信、受信信号のミキシング、少なくとも一つの出力信号から少なくとも一つの時間パラメータの決定の工程を有するヘテロダイン受信の原理により実行され、改善される。受信信号のミキシングにおいて、少なくとも二つのパルス混合信号が、少なくとも二つの出力信号を与えるために混合され、少なくとも二つの混合信号は互いについて位相シフトしている。 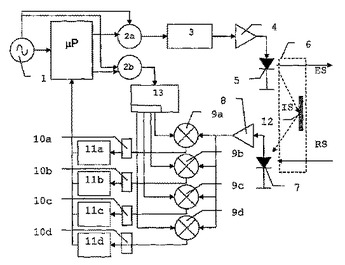 (もっと読む)
(もっと読む)
目標追尾装置
【課題】検出信号の電力情報を用いて、目標の検出追尾精度の向上を図った目標追尾装置を得る。
【解決手段】追尾目標に対する受信信号から検出信号情報を生成する検出信号情報生成手段11と、検出信号情報履歴データおよび目標航跡データを蓄積するデータ記憶部13と、特定された検出信号群の電力積分結果を算出する信号電力積分手段14と、検出信号情報および目標航跡データに基づいて航跡の仮説群データを作成して、仮説群データの中から検出信号群を特定し、対応する電力積分結果を受け取り、種々の検出信号群に対する電力積分結果に基づいて仮説群データを修正して仮説群修正データを生成し、データ記憶部13の目標航跡データを更新する航跡作成手段12と、更新された目標航跡データに対して、所定の判定基準を満たすものを真の目標航跡として特定する目標判定手段15とを備える。
(もっと読む)
モードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法
【課題】モードSトランスポンダから送信された信号を正確に解読することが可能なモードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法を提供する。
【解決手段】モードSトランスポンダ送信信号に対して微分処理を行う微分処理部43と、微分処理がなされた信号における強度の上昇変化率と下降変化率との相関の度合を演算する相関演算部44と、相関演算処理により得られた相関の度合に基づいてパルスを再生するパルス再生部45と、再生されたパルスに対してゲート処理と位相同期処理とを行うパルス位相同期部46と、ゲート処理と位相同期処理とがなされたパルスを基にモードSトランスポンダ送信信号を解読するパルス解読部47とを設ける。
(もっと読む)
パルス信号分類装置
【課題】 到来パルス信号のパルス到来時刻が互いに近接しているような場合でも、各受信パルスのパルスデータを正確かつ高速に電波源毎に分類する。
【解決手段】 複数の電波源からのパルス信号を受信する受信部と、受信パルス信号のパルスデータを生成するパルスデータ生成部と、そのパルスデータから受信パルス間のパルス到来時刻間隔を算出し、前記パルスデータを電波源毎に分類するパルス間隔分類処理部と、その電波源毎に分類された各パルスデータ群を記憶するパルスデータ記憶部と、各パルスデータ群からパルス到来時刻が互いに近接する近接パルスの波形データを抽出する近接パルス波形抽出部と、その波形データと前記各パルスデータ群の平均波形データとの相関処理を行う相関処理部とを備え、近接パルスの波形データとの相関値が大きいパルスデータ群のパルスデータを近接パルスのパルスデータと変更するようにした。
(もっと読む)
レーダ装置
【課題】 多面の空中線から電波を送信し、なおかつセクタースキャンするレーダ装置において、優先的して追尾する目標に対し、追尾データレートの向上を図り、追尾精度を向上させる。
【解決手段】 各受け持ち角度範囲内を指向性ビーム(アンテナビーム#1〜#4)で往復スキャンしながら空間への電波の放射および空間からの反射電波の受信を行う4個のアンテナを90°間隔で4方向に配置して全方位からの観測データを得る構成において、各アンテナビームによる監視範囲を90゜+Δθとすることにより、斜線部で示すΔθのオーバーラップ方位角幅を設け、このオーバーラップする方位角領域Δθの中心方位を、オペレータが指定した方位又は追尾の予測位置の方位となるように空中線装置を機械的に駆動させ、その状態を基準としてセクタースキャンを行う。
(もっと読む)
追尾装置
【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
521 - 540 / 573
[ Back to top ]