
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
541 - 560 / 573
パルスレーダー装置

【課題】本願発明は、受信パルスと同程度の大きさのノイズであっても除去することができ、かつ簡単な構成でノイズを除去することのできるパルスレーダー装置を提供することを目的とする。
【解決手段】上記目的を達成するために、本願発明にかかるパルスレーダー装置は、所定の時間間隔だけ離れた第一の送信パルス及び第二の送信パルスを変調して送信パルス波を送出し、前記第一の送信パルスに対応する送信パルス波を送出してから受信回路がパルスを出力するまでの時間と第二の送信パルスに対応する送信パルス波を送出してから受信回路がパルスを出力するまでの時間とが等しいときに、前記パルスは対象物からの反射によって生じた受信パルスであると判定する。
(もっと読む)
マルチレーダシステム及びその制御方法

【課題】マルチレーダシステムの管制所に、航空機の正確な位置を正確に表示する。
【解決手段】GPS衛星1からのGPS信号をGPSアンテナ21、22で受信し、GPSクロック受信機31、32が正確な標準時刻(任意のタイムゾーン)をNTP(ネットワークタイムプロトコル)にてLAN91、92に出力する。LAN91、92に接続される信号処理プロセッサ41、42は、GPSクロック受信機31、32から出力される標準時刻を使用して、自身のシステムクロックを較正する。タイムスタンプ生成部101、102では、レーダ51、52で検出した航空機の位置情報に、航空機を検出した時刻をGPSクロックによるタイムスタンプとして付与する。タイムスタンプを付与された航空機位置データは、WAN6経由で情報処理装置7に伝送される。情報処理装置7では、レーダからの航空機位置データに対して、追尾処理(相関、予測、虚偽目標棄却)、位置算出処理を実行する。
(もっと読む)
地中レーダ画像処理法
【課題】
地中レーダ等の近距離レーダの画像を処理する方法において、現在使われている処理法は、多大な計算時間を要する、また、特に複数の対象物が近接して存在する場合に虚像を生じるという欠点がある。本発明はこれら2つの課題を解決することを目的とする。
【解決手段】
対象物モデルから参照パターンを求め、参照パターンの自己相関、参照パターンと受信データとの相互相関を求める。相互相関から対象物探査用データと対象物評価用データを作成し、対象物探査用データの極値を自己相関と対象物評価用データに基づいて評価する。評価の結果、その極値値が対象物の可能性があると判定されると、対象物探査用データのその極値の位置から自己相関を減算し、新たな探査を実行する。
(もっと読む)
レーダ装置
【課題】 近距離領域から長距離領域までに存在する物体を精度よく検知可能なパルスレーダ装置を提供すること。
【解決手段】 パルスレーダ装置1において、近距離モードの間、発振器12は、一定の周波数を有する搬送波を生成し、パルス生成部13は、相対的にパルス幅の短い第1のパルスを繰り返し生成し、変調部14は、第1のパルスで搬送波を変調して第1の高周波パルスを生成する。また、長距離モードの間、発振器12は、低周波数及び高周波数の間で掃引されたチャープ信号を生成し、パルス生成部13は、相対的にパルス幅の長い第2のパルスを生成し、さらに、変調部14は、第2のパルスでチャープ信号を変調して第2の高周波パルスを生成する。送信用アンテナは、以上のような第1の高周波パルス及び第2の高周波パルスを空間に送出する。
(もっと読む)
信号の遅延敏感測定のための方法及び装置
【課題】測定時間を短縮できる方法と装置を提供する。
【解決手段】i)少なくとも部分的に強度変調された信号PE(t)の瞬間値を検出し、ii)強度変調の周波数ω1とは異なる周波数ω2を有する、第1の基準信号Um(t)の瞬間値を検出し、iii)混合信号値UΔを得るために、PE(t)の検出された瞬間値を、Um(t)の検出された瞬間値と混合し、iv)ω2及びω1の双方と異なる周波数Δωを有する、第2の基準信号UI(t)の瞬間値を検出し、v)同じ周波数Δωを有するが、UI(t)に対して位相シフトされている、第3の基準信号UQ(t)の瞬間値を検出し、vi)第1の測定信号値を得るために、UΔをUI(t)の検出された瞬間値と混合し、vii)第2の測定信号値を得るために、UΔをUQ(t)の検出された瞬間値と混合し、及びviii)該二つの測定信号値からPE(t)の振幅及び/又は位相位置を計算する。
(もっと読む)
距離を測定する方法および装置
装置は、同時に送信される2つの成分を備える無線信号を使用して距離を測定する。これら2つの成分はそれぞれ繰返し符号を備え、これら2つの符号は継続時間が異なる。信号を受信すると、その伝搬距離が各コードごとに別々に計算され、比較される。2つの計算結果が同一となる場合にのみ、計算された距離が有効であると見なされる。これら2つの符号の継続時間は、それぞれ互いに素の関係にある2つの数に比例していることが好ましい。信号は、距離計算を実施するのと同一の装置によって生成され送信されて、遠隔装置によって再送信されてその装置に戻される。あるいは、その信号をその遠隔装置によって生成し送信してもよい。 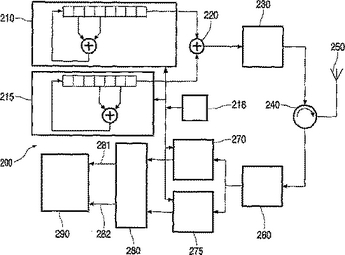 (もっと読む)
(もっと読む)
測高レーダ装置とその測角処理方法
【課題】 マルチパスによる測高精度の劣化を低減し、目標検出率を向上させる。
【解決手段】 仰角方向に連続した複数のビーム#1〜#3で目標を検出する場合、マルチパスの影響を受けた下側ビームの受信感度が最大となっている場合でも、他のビームでは正しい測角結果を出力している事象が多く得られることに着目し、仰角方向に受信強度分布に谷ができた目標要素をクラッタとして棄却するのではなく、下側ビーム#1以外で受信強度が最大となったビーム#3の測角値を採用する。これにより、マルチパスの影響を受けた場合でも、検出率を下げることなく測高精度の劣化を低減することが可能となる。
(もっと読む)
近距離目標物体の距離及び角度特定用の多目標対応型方法及び多目標対応型センサー機器
本発明は、近距離目標物体の距離及び角度特定用の多目標対応型方法に関し、本方法は以下のステップを含む。すなわち、a)第一のセンサー要素(10)の送信アンテナ(11)により特性信号が送信され、b)反射された特性信号が第一のセンサー要素(10)の少なくとも2個の隣接する受信アンテナ(1、2)において受信され、c)目標物体と第一のセンサー要素(10)の間の距離を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)への反射された特性信号の伝播時間の差が測定され、d)目標物体と第一のセンサー要素(10)との角度を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)の間での特性信号の位相差が測定される。本発明は、上述の方法を実施する機器にも関する。  (もっと読む)
(もっと読む)
センサ情報処理システム
【課題】 多種・多様なセンサ情報を一元管理し、融合処理して、情報を整理して操作者に提示する。
【解決手段】 センサ情報処理システムをJDL準拠の構成とし、各種センサからの情報を画像、シンボル、文字、数値及び音のまま保持、管理するマルチメディアDBMS(データベース・マネージメント・システム)121に登録し、登録したセンサ情報の物理的な性質に基づき、パターン認識及びセンサ信号融合処理を施し、操作者が必要とする情報に加工する。加工された情報は、操作者の作業目的に応じた表示とその表示に基づく操作を提供するため、エージェントと呼ぶ操作者の操作パターンに基づき提示する。したがって、多種・多様なセンサ情報を一元管理し、融合処理して、情報を整理して操作者に提示することができる。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 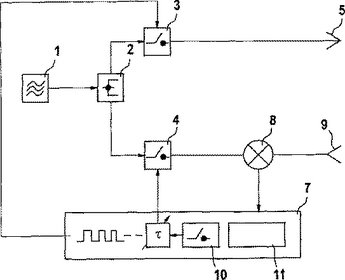 (もっと読む)
(もっと読む)
レーダ装置
【課題】 1つの追随航跡に含まれる目標の機数を正確に判定することができるレーダ装置を得る。
【解決手段】 対象となる目標11に追随しながら指向性をもつ追随ビームを送信し、目標からの反射波を受信して目標の検出、追随、情報管理、類識別及び表示を行うレーダ装置2において、目標を検出するためのレンジビン401内における第1の目標の機数を検出するとともに、追随フィルタの相関ゲート402内でかつレンジビン401外における第2の目標の機数を検出する。前記の第1の目標の機数及び第2の目標の機数を加算して総合機数を判定する。
(もっと読む)
レーダ装置
【課題】 MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】 到来波数推定処理の際に、信号処理部8に記憶しておいたビート周波数ごとのスレッショルドλTH1〜λTH256に基づいて雑音を考慮したスレッショルドλTHを設定し、このスレッショルドλTHに基づいて到来波の固有値λが信号空間の固有値λ1〜λLか雑音空間の固有値λL+1〜λKかを分別する。これにより、雑音を考慮に入れた上で、信号空間の固有値の数から到来波の数を正確に推定することができる。
(もっと読む)
高度計装置、及び、距離計算方法
【課題】 自己が信号を発することなく、自己の高度を計測する高度計装置を得る。
【解決手段】 この発明の高度計装置30は、飛行体11の上部に第1の受信系(第1の受信アンテナ23aと第1の受信部33)を設け、飛行体11の下部に第2の受信系(第2の受信アンテナ23bと第2の受信部35)を設け、準天頂衛星201が送信した直接波の測位信号203を第1の受信系により受信して、測位信号203の反射波の信号205を第2の受信系により受信する。さらに、信号処理部37を備えて直接波と反射波との時間差を求め、求めた時間差に対して光速を乗じて距離を求めて、求めた距離の半分を反射点から自己までの高度(距離)とする。
(もっと読む)
合成開口レーダ画像処理装置
【課題】 合成開口レーダ画像の分解能を劣化させることなくスペックル雑音を低減し、画質の向上を図る。
【解決手段】 シングルルック画像の段階で、飛行プラットホームの測定速度に対して、前処理部7にて異なる速度バイアス(時間によって変化するバイアスを含む)を与えた複数の速度データより画像を複数生成し、これらを加算処理部8で加算することで、分解能の劣化を招くことなくスペックル雑音が低減された合成開口レーダ画像を生成し、またこれと従来技術と組み合わせることで効果的にスペックル雑音が低減された合成開口レーダ画像生成を実現する。
(もっと読む)
周波数ホッピング信号検出装置及びこれを用いた電波監視システム
【課題】 周波数ホッピング信号検出装置及びこれを用いた電波監視システムでは、受信レベルの変動や干渉妨害及び伝搬損により周波数ホッピング信号のホッピング時間の短時間化が生じ、周波数ホッピング信号の誤検出の原因になる課題があった。
【解決手段】 周波数ホッピング信号の周波数の変動する幅が広帯域に渡る場合でも到来電波を広帯域に渡り一括受信して、到来電波の画像データ(パターン)と事前に保持している周波数ホッピング信号のチップ情報を含むスペクトログラム画像データ(パターン)との一致度(類似度)から到来電波に含まれる周波数ホッピング信号を周波数ホッピング信号に同期して受信周波数を切り替えることなしに抽出して周波数ホッピング信号を検出する。
(もっと読む)
レーダ画像処理装置
【課題】観測対象の範囲に対するその範囲中で時間的変化を生じる範囲の面積比が小さい場合であっても、観測対象の時間的変化の検出精度が高いレーダ画像処理装置を得ることを目的とする
【解決手段】異なる時刻にレーダ装置により取得された観測対象の2つのレーダ画像の観測対象の所定範囲に対応するそれぞれの部分画像間の相関値を算出し、所定範囲の中で異なる時刻の間に時間的変化を生ずる範囲の面積である変化面積を予測して、所定範囲の面積及び予測された変化面積に応じて相関値を補正し、この補正された相関値をもとに所定範囲における異なる時刻の間に生じた観測対象の時間的変化を検出するようにしたものである。
(もっと読む)
レーダ装置
【課題】短時間で目標上の電波反射点の空間位置を算出し、目標の3次元形状を算出できるレーダ装置を得ることを目的とするものである。
【解決手段】目標による反射電波を互いに異なる位置にある2つの受信手段からなる一組の受信手段で受信し、目標上の電波反射点に対応するレンジ及びドップラー周波数からなる電波反射点情報を算出する。算出された電波反射点情報をそれぞれに対応する目標上の電波反射点が一致する一組の電波反射点情報として対応付けを行い、一組の電波反射点情報並びに目標と一組の受信手段との相対位置及び相対運動から目標上の電波反射点の空間位置を算出するようにしたものである。
(もっと読む)
地形援助型航法システムの精度を高めるための方法およびシステム
航法プロセッサ(208)と、航法プロセッサに位置解を提供するように構成される慣性航法ユニット(206)と、デジタル標高地図(212)とを含む、航法システム(200)が説明される。説明される航法システムは、デジタル標高地図から地図データを受け取り、レーダの戻ってきたデータに基づいた位置解を航法プロセッサへ提供するように構成される、地形相関プロセッサ(210)を有する、レーダ高度計(50)も含む。航法システム内の地図品質プロセッサ(202)は、デジタル標高地図から地図データを受け取り、地図品質ファクタを航法プロセッサへ提供するように構成され、航法プロセッサは、地図品質ファクタに従って、地形相関プロセッサからの位置解に重み付けを行い(256)、その地形相関プロセッサの重み付けされた位置解と、慣性航法ユニットからの位置解とから、位置解を決定する。  (もっと読む)
(もっと読む)
高周波測定装置への妨害信号の影響を低減する方法、および、高周波測定装置
本発明は、高周波測定装置への妨害信号の影響を低減する方法、とりわけ、高周波測定装置の受信装置により検出されたアナログ測定信号(22)を該アナログ測定信号(22)のための評価ユニットの少なくとも1つのアナログディジタル変換器(28)に供給するようにした高周波測位装置を動作させるための方法に関する。
本発明によれば、前記少なくとも1つのアナログディジタル変換器(28)のサンプリングレートは妨害信号と相関する妨害信号測定値に応じて変化させられる。 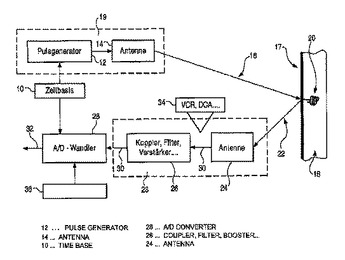 (もっと読む)
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 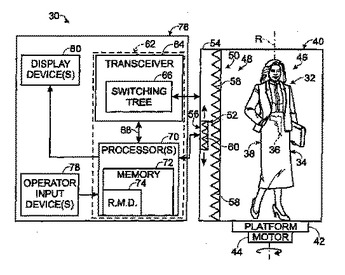 (もっと読む)
(もっと読む)
541 - 560 / 573
[ Back to top ]