
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
281 - 300 / 573
無線測距システム及び無線測距方法
【課題】複数の基地局間のクロック同期、及び、基地局間の位置関係の入力を必要とすることなく、基地局と端末との距離を測定すること。
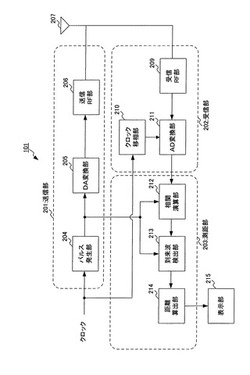
【解決手段】クロック移相部210は、送信パルスの発生に用いたクロックを100ナノ秒毎に特定の移相量でシフトして、AD変換部211は、シフトしたクロックを用いて、端末103から再放射された信号をデジタル信号に変換する。相関演算部212は、デジタル信号と送信パルスとの相関演算を行い、シフトした位相におけるデジタル信号を同じ位相毎に加算して得られる遅延プロファイルを形成し、到来波検出部213は、遅延プロファイルにおいてパルスのピークを検出する。距離算出部214は、パルスを送信したタイミングとパルスのピークを検出したタイミングとに基づいて、端末103までの距離を算出する。
(もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム

【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
物体検出装置
【課題】反射波信号のサンプリング時間が長い場合であっても、物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、ADコンバータ221から出力されるサンプリング時間ΔT毎の反射波信号を取得する受信信号取得部12と、周囲の物体の画像を撮像するステレオカメラ23を介して、物体との相対速度ΔVを検出する検出部13と、検出部13によって検出された相対速度ΔVから反射波のパルス間隔を求める間隔算出部15と、受信信号取得部12によって取得された反射波信号及び間隔算出部15によって求められたパルス間隔に基づいて、反射波の波形を求める波形算出部16と、求められた反射波の送信波に対する遅延時間を求める遅延時間算出部17と、求められた遅延時間に基づいて、物体との距離を求める距離算出部18と、を備える、
(もっと読む)
レーダ装置
【課題】複雑な処理をせずとも、互いに略等しい相対距離に存在する対象物の数を検出することのできるレーダ装置を提供する。
【解決手段】画像処理部10は、放射された電磁波が、カメラ101によって撮像された画像に撮像されている他車両で反射した反射波を受信するまでの受信時間を算出する。さらに、画像処理部10は他車両との相対距離を算出し、算出した相対距離と略同じ相対距離に存在する他車両の数を計数し、計数した数と算出した受信時間とを対応づける。レーダ処理部11は、放射された電磁波と反射波との相関を演算しながら、相関がピーク値を生じたときの反射波の受信時間と画像処理部10によって算出された受信時間とを比較して、略等しい受信時間に対応づけられた他車両の数を特定する。レーダ処理部11は、ピーク値を生じた相関の受信時間に基づき相対距離を算出し、特定した他車両の数を対応づける。
(もっと読む)
飛しょう体のレーダ装置
【課題】追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供する。
【解決手段】複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える。アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。また、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。
(もっと読む)
多目標追尾装置
【課題】追尾の難易度に応じてアルゴリズムの切り換えを行うことができる多目標追尾装置を得る。
【解決手段】前観測時刻でMHT追尾処理を実行する第1の条件、及び前観測時刻で追尾が困難であると判定する第2の条件を満たす場合は、センサ1からの複数のフレームに跨る観測値を用いて多次元の相関を取りながら、MFA処理で相関解を生成するMFA追尾処理部4と、前記第1及び第2の条件の何れかの条件を満たさない場合は、センサ1からの最新観測値と既存追尾航跡の2次元の相関を取り、複数の仮説を生成しながら新たな航跡を生成するMHT追尾処理部2と、MHT追尾処理実行中に、生成された仮説の状況から追尾が困難であるかどうかを判定するMHT仮説監視部3と、MFA追尾処理部4で生成された相関解をMHT追尾処理部2の仮説として置き換えるMHT仮説設定部5とを設けた。
(もっと読む)
無線タグ距離測定装置および無線タグ距離測定システム
【課題】無線タグ距離測定装置において、距離測定を行うための事前処理を容易にすることを目的とする。
【解決手段】無線タグ距離測定装置10は、拡散処理が施されていないパルス変調信号を送信する。各無線タグは、無線タグ距離測定装置10から送信されたパルス変調信号を受信する。そして、自らに固有に割り当てられたPN符号によってパルス変調信号に拡散処理を施し、拡散処理後の信号を拡散パルス変調信号として送信する。無線タグ距離測定装置10は、各無線タグから送信された拡散パルス変調信号に基づいて各無線タグの固有割り当てPN符号を検出する。無線タグ距離測定装置10は、測定対象PN符号記憶部20に記憶されているPN符号を用いて無線タグまでの距離を測定する。
(もっと読む)
車両傾斜検知装置
【課題】温度変化や風や騒音があっても傾斜角度を精度よく検知することができる車両傾斜検知装置を得ることを目的とする。また、受信信号レベルの偏位があっても傾斜角度を精度よく検知することができる車両傾斜検知装置を得ることを目的とする。
【解決手段】車両に設置され、所定の周波数、振幅、位相を持つ送信信号を送信アンテナから電波にして放射する送信手段と、地面で反射した電波を2つの受信アンテナで受信し第1の受信信号と第2の受信信号として取り出し送信手段からの送信信号と第1の受信信号で直交検波して得た信号から第1の振幅値と第1の位相値を算出し送信手段からの送信信号と第2の受信信号で直交検波して得た信号から第2の振幅値と第2の位相値を算出する受信手段と、算出された振幅値と位相値に基づいて車両の地面に対する傾斜角度を算出する傾斜角度演算手段を備えたことを特徴とする車両傾斜検知装置。
(もっと読む)
レーダ装置
【課題】他車両の数に応じて符号信号の符号長さを調節することのできるレーダ装置を提供する。
【解決手段】カメラで自車両の走行方向を撮像した画像を画像処理することにより他車両の数を計数し、計数した数に基づいて符号信号の符号長さと次数を決定する。決定した符号長さと次数で生成した符号信号を電磁波として空間に放射し、当該符号信号と受信部によって受信された信号との相関を演算することにより、他車両との相対距離などを対象物の情報として算出する。
(もっと読む)
レーダ装置、補償量算出方法
【課題】複数の送信チャンネル又は受信チャンネルを有するレーダ装置において、装置規模を増大させることなく、送信チャンネル又は受信チャンネル間の特性差を、長期間に渡って安定して補償できるようにする。
【解決手段】2チャンネル分の受信回路を集積した複数の受信用IC42,43を用いてレーダ装置1を構成する。同一チップ(受信用IC)に属する隣接した受信チャンネル間の位相差Δθ12,Δθ34が一致している場合に、単一物標からの反射波に基づく受信信号であるものと判断して、補償量算出用データΔθdの算出を行う。この時、受信チャンネル間の特性差の影響を受けないデータとして、上述の位相差Δθ12,Δθ34を用い、受信チャンネル間の特性差の影響を受けるデータとして、互いに異なるチップに属する隣接した受信チャンネル間の位相差Δθ23を用い、これらに基づいて補償量算出用データΔθd、ひいては補償量Δθhを算出する。
(もっと読む)
信号レベル判定装置及び信号レベル判定方法
インパルス性雑音を含む背景雑音が存在する中で信号をロバストに検出するための装置及び方法が開示される。信号の各値は、2次元空間内の直交軸上の2つの座標によって定義される半円上の点にそれぞれマッピングされる。変換された各点の2つの座標からそれぞれの平均が計算され、それぞれの2つの平均を用いて半円上の点の密度を表す検出閾値が計算される。信号値の平均が計算されて検出閾値と比較される。代替的には、半円上の点の密度に基づいて平均が調整され、調整された平均が一定の閾値と比較される。 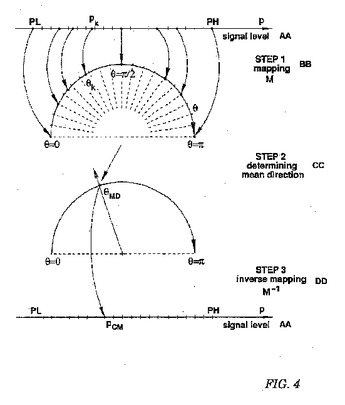 (もっと読む)
(もっと読む)
レーダ装置
【課題】車両の遠方にいる歩行者等の物体、および、車両に近接した歩行者等物体の双方を高感度で検出できるレーダ装置を提供すること。
【解決手段】レーダ装置は、仰角面内において水平方向への指向性を有する指向性ビームを放射する水平用送受信アンテナと、水平より上方である所定の方向への指向性を有する指向性ビームとを放射する高仰角用送受信アンテナとを備える。また、レーダ装置は、指向性ビームを放射するアンテナを水平用送受信アンテナおよび高仰角用送受信アンテナのいずれか一方に切り替えるための切替手段を備える。
(もっと読む)
マルチスタティックレーダ装置
【課題】パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得る。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
(もっと読む)
レーダ装置
【課題】方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。
【解決手段】アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から前記複数の個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタとを備えた。
(もっと読む)
目標検出装置
【課題】高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
(もっと読む)
レーダ装置および無線伝送特性測定方法
【課題】耐干渉性に優れ、かつ、高速な相関器が不要で回路構成の容易性にも優れた「レーダ装置および無線伝送特性測定方法」を提供する。
【解決手段】装置IDが同相成分と直交成分とで表されたベースバンド信号S(t)を送信信号として利用し、外部の伝送路を介して送られてくる信号を受信した場合、受信した信号と、ベースバンド信号S(t)と周波数軸領域において複素共役の関係にある複素共役信号S*(ω)との相互相関を演算することにより、受信信号に畳み込まれている伝送特性の中から、装置IDとの相関性が高い伝送特性の信号成分を取り出す。このとき、送信信号の直交性により、他のレーダ装置から送信され伝送路を介して受信された信号の伝送特性を相関演算によって排除し、自身のレーダ装置から送信された信号の伝送特性だけを完全に分離して取り出せるようにする。
(もっと読む)
時間領域法を用いた二重偏波レーダ処理システム
本発明の実施形態では、二重偏波レーダシステムにおける環境パラメータの改良された推定を提供する。いくつかの実施形態では、環境パラメータは、2つの直交する偏波状態において受信されたデータの線形結合を用いて推定されうる。特に、発明の実施形態は、二重偏波レーダシステムにおける地上反射波及びノイズの低減を改良する。さらに、発明の実施形態はまた、二重偏波レーダシステムにおける、反射率の差及び/または同極の相関係数の大きさの少なくともいずれか、及び位相差を決定するためのシステムを提供する。 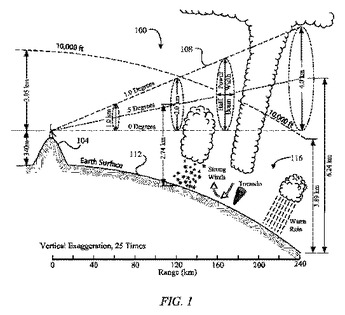 (もっと読む)
(もっと読む)
レーダ装置
【課題】補助空中線で受信する任意の繰り返し周期やパルス幅の妨害波信号に適応して、存在する妨害波信号のみを的確に抽出可能にする。
【解決手段】妨害情報収集・解析部により、補助空中線による受信信号から妨害波信号を直接検出し、検出した妨害波信号列に基づいて、妨害波信号情報とする妨害波信号のパルス幅と妨害パルス間隔を算出し、補助空中線受信ゲート制御部により、妨害波信号情報に基づいて、少なくとも主空中線による反射波信号を抽出するための主空中線送信ゲート期間を避け、かつ補助空中線による妨害波信号と同一のタイミングを持って同期する補助空中線受信ゲート期間を算出する。
(もっと読む)
距離測定装置用受信機および距離測定装置
【課題】無線信号の送受信によって距離測定目標までの距離を測定する距離測定装置において、距離測定精度を高めることを目的とする。
【解決手段】アンテナで受信された信号に対しローカル信号によって直交検波処理を施す直交検波部と、マルチパス環境下を伝播し受信された無線信号から所望の信号を分離する処理を直交検波信号に対して施す分離処理部とを備え、距離測定目標までの距離を測定する装置に搭載され、分離処理部によって分離された信号に基づいて距離測定用信号を生成する距離測定装置用受信機において、ローカル信号に対し、その位相変化の極性を反転する処理を施し、逆回転ローカル信号を生成する逆回転処理部と、分離処理によって分離された信号に対し、逆回転ローカル信号によって直交変調処理を施し、距離測定用信号として出力する逆回転直交変調部と、を備えることを特徴とする。
(もっと読む)
レーダ信号処理装置
【課題】 パルスドップラーレーダ装置において、ノイズによる誤警報確率を低く抑え、且つ、目標の検出確率確率を向上させた簡易な構成のレーダ信号処理装置を提供する。
【解決手段】 目標からの反射波を受信処理しレーダ装置からの距離毎に受信パルス信号の時系列を出力する受信部と、この距離毎の受信パルス信号の時系列に対しコヒーレント積分を施し距離毎の受信データの周波数系列を算出する信号処理部と、この距離毎の受信データの周波数系列に対し周波数成分ごとにCFAR処理を施し検出スレッショルド以上のS/N比を持つ受信データの周波数系列を検出する信号検出部と、この検出された受信データの周波数系列の周波数方向の相関性に基づき前記受信パルス信号の時系列が前記目標からの反射波によるものか雑音によるものかを判定するフィルタ相関部とを備えた。
(もっと読む)
281 - 300 / 573
[ Back to top ]