
Fターム[5J070AH31]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | デジタル処理を行なうもの (1,302)
Fターム[5J070AH31]に分類される特許
221 - 240 / 1,302
レーダ装置
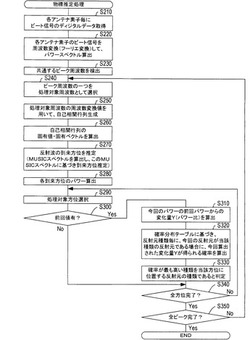
【課題】反射波の受信信号から反射元の種類を判別可能な技術を提供すること。
【解決手段】レーダ装置の信号処理部は、反射波のパワー(受信電力)Pと、このパワーPに対応する反射波の受信時点から観測周期Tsw=Tm遡った時点で受信された反射波のパワーPbと、に基づき、パワーPbに対するパワーPの変化量Y=log(P)−log(Pb)を算出する(S310)。一方、当該レーダ装置は、判別対象とする反射元の種類毎に、レーダ波が当該種類の反射元で反射して到来する反射波から算出される変化量Yの確率分布を記憶する。そして、算出された変化量Yと、上記反射元種類毎の確率分布とから、今回算出された変化量Yに対応するレーダ波の反射元の種類を判別する。即ち、反射元種類毎に、当該変化量Yが得られる確率Prを算出し(S320)、確率Prの最も高い種類を、今回のレーダ波の反射元であると判別する(S330)。
(もっと読む)
DBF受信装置

【課題】 レーダ信号の受信経路が複数チャンネルある場合であっても、ハードウェア規模の大型化及び装置の高コスト化を抑えることが可能なDBF受信装置を提供する。
【解決手段】 DBF受信装置は、アレーアンテナ、ダウンコンバータ、アナログ−デジタル変換器及びDSPを具備する。ダウンコンバータは、アレーアンテナで受信されたレーダ信号をIF信号に変換する。アナログ−デジタル変換器は、IF信号をデジタル信号に変換する。DSPは、FFT処理部、零埋め処理部、周波数シフト処理部及びビーム形成処理部を備える。FFT処理部は、デジタル信号に対して、2のN乗のデジタルデータ毎にFFT処理を行う。零埋め処理部は、2のN乗のデジタルデータのうち、通過周波数帯域外のデジタルデータを零にする。周波数シフト処理部は、デジタルデータの周波数をシフトさせる。ビーム形成処理部は、周波数シフト後のデジタルデータを用いて受信ビームを形成する。
(もっと読む)
速度計測装置
【課題】路面に対する移動体の速度を正確に計測する。
【解決手段】速度計測装置は、路面形状データを取得する路面形状センサ11と、路面形状データを格納するメモリ12と、メモリ12に格納された路面形状データに基づいて、車両10の速度を計算する演算装置13とを備える。路面形状センサ11は、路面に電波を放射し、路面形状センサ11からの距離が異なる路面上の複数の構造物によって反射された各反射波の信号レベルと、路面形状センサ11から各構造物までの伝搬距離とを測定することで、路面形状データを取得する。演算装置13は、各路面形状データの伝搬距離を、路面に射影した水平距離に変換し、類似する路面形状データが取得されるときの路面形状データとの水平距離の差を決定し、水平距離の差を測定時間の差で除算して移動体の速度を計算する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】スキャン相関によって物標のエコーが弱まることを防止する信号処理装置を提供する。
【解決手段】信号処理部17は、物標検出部16が物標を検知した地点に対応するスキャン相関後のエコー信号のレベルを調整する。具体的には、物標検出部16が物標を検知した各地点を中心としてガウス関数に基づく特性でレベル調整を行う。物標が検出された地点では、強いエコー信号が検出されていることになるため、その地点のエコー信号をレベル調整(強調)することで、高速で移動する物標のエコー信号がスキャン相関によって弱まったとしても、高いレベルで出力することができる。また、ガウス関数に基づく特性でレベル調整を行うため、ある地点だけ極端にエコー信号が強調されてしまうことを防止することができる。
(もっと読む)
探知装置、レーダ装置、探知方法、および探知プログラム
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
(もっと読む)
レーダ装置
【課題】昇順および降順周波数シーケンスを用いて送受信された信号同士の複素乗算結果から2次元フーリエ変換を用いて目標相対速度を計測可能なレーダ装置を得る。
【解決手段】目標相対速度情報取得手段11と、送信波形諸元を生成する送信波形制御器1と、任意周波数発振器2と、90度ハイブリッド器7と、送信機3と、送信機3からの信号を目標に照射して反射された信号を受信するアンテナ4と、分配器5と、位相検波器6a、6bと、低域通過フィルタ8a、8bと、A/D変換器9a、9bと、ビデオ信号記憶手段10と、目標相対速度Vdを用いて信号を補正する相対速度補正処理器12と、合成帯域処理器13と、目標距離Rを計測する目標検出処理器14とを備える。
(もっと読む)
FM−CWレーダ装置、ペアリング方法
【課題】目標物に対するペアリングを短期間で精度良く行うことを可能とするFM−CWレーダ装置、ペアリング方法を提供すること。
【解決手段】電圧制御発振器11の制御電圧VCONTの算出方法を周波数上昇区間と周波数下降区間とで異なるように制御し、送信波と受信波を混合して得られたビート信号の周波数成分を算出し、周波数上昇区間におけるビート信号の周波数成分と、周波数下降区間におけるビート信号の周波数成分とのペアリングを行い、ペアとなった成分同士の信号レベルの差が所定値以下である周波数成分のペアを、目標物(ターゲット)に対応する正しいペアとして特定する。
(もっと読む)
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置
【課題】レインクラッタ等のランダム性の高いクラッタを、正確且つ効果的に抑圧できる物標探知方法を実現する。
【解決手段】対象の極座標位置を含む所定範囲の探知データ値を取得する(S101)。方位方向に隣り合う探知データ値の差を算出して、値の変動を検出し(S102)、設定対象の極座標位置に対する変動カウントCnvを算出する(S103)。変動カウントCnvが閾値Thよりも高ければ(S104:Yes)、設定対象の極座標位置のマスク画像データ値を最高値に設定する(S105)。変動カウントCnvが閾値Th以下であれば(S104:No)、設定対象の極座標位置のマスク画像データ値を最低値に設定する(S108)。マスク画像データの平滑化処理を行い(S106)、探知データ値から平滑化処理後のマスク画像データ値を減算する(S107)。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法及び信号特定プログラム
【課題】入力信号から不要な信号を除いて、物標での反射によるエコー信号を検出する信号処理装置、レーダ装置、信号処理方法及び信号特定プログラムを提供する。
【解決手段】物標での反射によるエコー信号を受信信号から検出する信号処理装置において、信号レベル検出部21で入力信号の信号レベルを検出し、立ち上がり検出部22で入力信号におけるエコー信号の立ち上がりを検出する。検出した立ち上がりの開始時以降における信号の信号レベルの最大値を閾値決定部25で特定する。特定した最大値に基づいて、エコー信号検出部26で物標での反射によるエコー信号を検出する。
(もっと読む)
レーダ装置
【課題】自レーダユニットの受信信号レベルに対する他レーダユニットからの干渉信号レベルを効果的に抑圧し、当該抑圧に必要な測定時間及び付加回路の増大を回避する。
【解決手段】第1レーダ送信部は、第1送信トリガ信号生成部が所定の同期確立信号の受信時から第1遅延時間経過後に生成された第1送信トリガ信号に基づいて、第1送信符号制御部の制御の下で、第1レーダ送信信号を第1送信周期で周期的に送信する。第2レーダ送信部は、第2送信トリガ信号生成部が当該同期確立信号の受信時から第2遅延時間経過後に生成された第2送信トリガ信号に基づいて、第2送信符号制御部の制御の下で、第2レーダ送信信号を第2送信周期で周期的に送信する。第1遅延時間及び第2遅延時間に応じて、第1レーダ送信部及び第2レーダ送信部からの各干渉信号の到来時が第2レーダ送信信号及び第1レーダ送信信号の各送信区間内となる。
(もっと読む)
超広帯域パルス・センサ
【課題】外部の干渉波の影響を除去でき、目標物までの距離検出精度の高いUWBパルス・センサの提供。
【解決手段】探知波生成部15は、周波数fmin〜fmaxを間隔Δfで等分した全周波数点集合から使用周波数点集合を含む周波数点を離散周波数点系列に従って並べ、探知波を順次発振する。探知波が目標物で反射された反射波は、受信後、位相検波器10で位相検波され周波数点に対する位相点系列が生成される。欠落補償部11は、各位相点に対応する周波数点の昇順又は降順で並べ替え、欠落した周波数点に対応する位相点を補間し、補間された位相点系列を算出する。逆離散フーリエ変換部12は、補間された位相点系列を逆離散フーリエ変換しレンジ・スペクトルを生成し、レンジ・スペクトルのピークの位相値からアンテナから目標物までの距離を算出する。
(もっと読む)
レーダ装置、注目物標検出方法及び注目物標検出プログラム
【課題】画像データから特定の注目物標の検出を精度よく行うことを可能にするレーダ装置、注目物標検出方法及び注目物標検出プログラムを提供する。
【解決手段】記憶部14に、鳥エコー信号の特性に基づいて生成された鳥のテンプレート画像データ14Bを記憶する。画像処理部133は、受信したエコー信号に基づいて生成した入力画像データと、記憶部14に記憶されたテンプレート画像データ14Bとのパターンマッチングを行い、入力画像データから鳥が含まれた領域を抽出する。
(もっと読む)
航空機の監視レーダシステム及び航空機の監視方法
【課題】航空機のトランスポンダから送信される捕捉スキッタまたは拡張スキッタの送信周期を利用して、モードSアドレステーブルに保持するモードSアドレスの数を必要最小限にし、かつ最新状態に保つ。
【解決手段】All Call Error Correction2はモードSアドレスを抽出し、モードSアドレステーブル5に蓄積する。Timer Reset Cntrl6は前記蓄積したモードSアドレスを、捕捉スキッタまたは拡張スキッタの送信周期よりも長い削除周期毎に削除する。Roll Call Error Correction8は航空機搭載のトランスポンダから送信される個別識別応答9から、モードSアドレス及びデータを抽出する。Comp CNTRL7は前記個別識別応答に含まれる前記モードSアドレスと、モードSアドレステーブル5内に蓄積した全てのモードSアドレスとを比較照合し、誤り訂正を行う。
(もっと読む)
レーダ装置
【課題】JEMを伴う場合の目標相対速度を正しく算出し性能向上を図ったレーダ装置。
【解決手段】送受信手段で受信された時間領域の受信信号を周波数領域に変換する周波数領域変換手段と、周波数領域変換手段で変換された周波数領域の受信信号における信号強度に基づく演算処理を行い目標候補を検出するとともに目標候補の相対速度を算出する目標候補検出手段と、目標候補検出手段で検出された目標候補の相対速度に基づきJEM間隔を算出するJEM間隔算出手段と、JEM間隔算出手段で算出された異なる時刻のJEM間隔に基づき目標の運動を判定する目標運動判定手段と、目標候補検出手段で算出された異なる時刻の目標候補の相対速度に基づき目標候補の加速度を算出する目標候補加速度算出手段と、目標運動判定手段の目標運動判定結果と目標候補加速度算出手段の目標候補の加速度に基づき目標および目標の目標相対速度を判定する目標判定手段とを含む。
(もっと読む)
レーダ装置
【課題】監視範囲を捜索し目標を検出すると追尾するレーダ装置において、省エネルギー化を実現する。
【解決手段】追尾処理部4から受信した目標の予測位置・予測S/Nに基づき、目標予測S/Nが上限検出確率より算出される上限S/Nを超えないように、目標予測位置に照射する追尾ビームの諸元(ヒット数・パルス幅)を制御するビーム諸元変更部5を設け、送信電力を削減する。更に、目標予測部41から受信した目標ドップラ周波数に基づき、周波数特性の異なる複数のクラッタ抑圧フィルタ303から利得が高くなるフィルタを選択するクラッタ抑圧フィルタ指示部305と、前記目標ドップラ周波数付近に限定したドップラバンクを周波数特性の異なる複数のドップラバンクから選択する目標ドップラバンク指示部307を設けて、信号処理負荷を削減し検出利得を向上させることにより、過剰に消費していた電力を大幅に削減する。
(もっと読む)
FMCWレーダ装置
【課題】目標物体に関する情報を算出する際の演算周期を短くでき、よって、目標物体の検知の際の応答性を向上することができるFMCWレーダ装置を提供すること。
【解決手段】レーダ装置1では、第1コア35と第2コア37とを用い、上り変調時の受信データ(上りビート信号)が得られた場合には即座に第1コア35でFFT等の演算を行い、下り変調時の受信データ(下りビート信号)が得られた場合には、第1コア35での演算と並列に、即座に第2コア35でFFT等の演算を行う。つまり、演算に必要な信号が得られた場合には即座に各コア35、37で演算を行うことができるので、上りビート信号と下りビート信号が得られるのを待って演算を行う必要がない。そのため、各演算処理の負荷(FFT等の演算負荷)が高負荷であっても、レーダ装置1における目標物体の認識のための演算周期を短くでき、よって、車両等の目標物体の検知の応答性を向上できる。
(もっと読む)
レーダ装置
【課題】目標物体の誤検出を起こさないレーダ装置を提供する。
【解決手段】送信部10からFMCW波をレーダ波として送信させ、目標物体に反射したレーダ波を複数の受信アンテナ22で受信し、レーダ波の受信信号及び送信信号と同じ周波数を有するローカル信号に基づいてビート信号を受信器24で生成し、信号処理部30では、ビート信号を所定のサンプリング周期Tsでサンプリングし、アップビート信号Buとダウンビート信号Bdのピークのペアマッチにより、目標物体の位置情報を導出する。このとき、信号処理部30では、サンプリング周期Tsの1/4の時間間隔tcで、複数の受信器24を配列順に選択する。
(もっと読む)
距離測定装置
【課題】計算量が少なく、かつ距離の算出精度を十分に高めることができる距離測定方法を用いた距離測定装置を提供することを目的とする。
【解決手段】受信手段と、測定部21と、記憶部22と、演算部(距離演算部)17と、を備え、演算部17は、記憶部22から取り出した振幅測定値を処理して、隣接チャンネルを含む周辺チャンネルよりも振幅が小さくなる極小値を検出し、隣接チャンネル間で高域側チャンネルの位相から低域側チャンネルの位相を差し引いた隣接チャンネル間の位相差を周波数軸方向に配列してなる位相差曲線において前記振幅極小値が検出されたチャンネル付近の極値が極大値であれば、その時に測定された前記位相差を用いて距離演算を行い、前記極値が極小値であればその時に測定された位相差は距離演算から排除することを特徴とする。
(もっと読む)
レーダ装置
【課題】従来の信号処理方法においては、アップ周波数とダウン周波数のペアを決定するペアリングが困難となる場合がある。
【解決手段】本発明のレーダ装置は、送信した電波が複数の目標物で反射された反射波を受信して受信信号を生成し、該受信信号から複数のアップ周波数ピークと複数のダウン周波数ピークとを検出すると共に、アップ周波数ピーク及びダウン周波数ピークにおける目標物に関する特性値を測定し、複数のアップ周波数ピークの各々と複数のダウン周波数ピークをそれぞれ1つずつ組み合わせ、各々の組み合わせについて、測定された特性値に基づいてマハラノビス距離を算出し、マハラノビス距離が所定のしきい値以下の組み合わせをペアリング候補として決定し、該決定したアップ周波数ピークとダウン周波数ピークに基づき、目標物の距離、相対速度及び角度の少なくとも1つを含む今回のデータを算出することを特徴とする。
(もっと読む)
地中レーダ
【課題】地中の埋設物を探知する地中レーダにおいて、路面上等に埋設物の埋設位置を容易に表示可能にする。
【解決手段】電磁波を送出する電磁波送信部5とこの電磁波の反射波を受信する電磁波受信部6とを備えたレーダ本体2を有し、電磁波受信部5からの受信波データAにより埋設物を探知する地中レーダ1において、レーダ本体2の移動位置を測定する位置測定部3と、レーダ本体2を移動させて埋設物を探知する際の受信波データAと受信波データA取得時に位置測定部3で得られるレーダ本体2の位置データBとに基づいて定まる埋設物の埋設位置データCを記憶する記憶部8と、再度、レーダ本体2を移動させた時に、当該移動の際に位置測定部3で得られるレーダ本体2の位置データBと記憶部8に既に記憶されている埋設位置データCとに基づいて埋設物11の埋設位置を表示する表示部4とを備える。
(もっと読む)
221 - 240 / 1,302
[ Back to top ]