
Fターム[5J070AH31]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | デジタル処理を行なうもの (1,302)
Fターム[5J070AH31]に分類される特許
81 - 100 / 1,302
物体検出装置
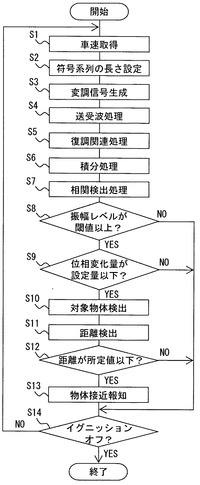
【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
追尾装置

【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
レーダ装置
【課題】各送信側系統間の動作を同期させるための回路構成を追加せずに、簡易な構成により複数のレーダ信号を分離する。
【解決手段】第1レーダ送信部は、所定の符号長の符号系列を、第1符号幅を用いて所定数繰り返した第1変調信号を送信する。第2レーダ送信部は、同じ符号系列を、第2符号幅を用いて所定数繰り返した第2変調信号を送信する。レーダ受信部は、第1符号幅と第2符号幅の差分値よりも小さいサンプリング周期で離散信号に変換するA/D変換部と、A/D変換部からの出力信号を、第1符号幅に応じた所定のサンプル数分遅延させる第1遅延部と、第2符号幅に応じた所定のサンプル数分遅延させる第2遅延部と、A/D変換部と第1遅延部とからの各出力信号とを基に第1相関値を算出する第1相関値算出部と、A/D変換部と第2遅延部とからのからの出力信号とを基に第2相関値を算出する第2相関値算出部とを用いて複数の受信信号を分離する。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 過去のスキャンで発生した雑音信号の影響を抑え、目標の位置を正確に検出することが可能なレーダ装置及び受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部及び積分部を具備する。パルス圧縮部は、無線部で受信したパルス信号に対してパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータに対してドップラフィルタ処理を施す。信号処理部は、ドップラフィルタ処理部で1スキャン毎に取得されるデータを固有データに変換する。予測部は、過去のスキャンで取得された固有データに基づいて次スキャン時の目標の位置を予測し、予測した位置に過去の固有データを累積した予測データを作成する。積分部は、次スキャン時に取得される固有データと、累積される積分数が予め設定された回数に抑えられた予測データとを積分する。
(もっと読む)
アンテナ配置算出装置
【課題】アンテナを2次元空間や3次元空間に配置する場合でも、サイドローブレベルが最小に近いアンテナ配置を効率よく算出することができるようにする。
【解決手段】アンテナ配置保持部3に記録されている評価値が最も良いアンテナ配置を選択し、そのアンテナ配置が示す位置に配置される複数のアンテナの中で、任意のグループに属しているアンテナを選択するアンテナ選択部6や、アンテナ選択部6により選択されたアンテナの位置を変化させて新たなアンテナ配置を生成し、そのアンテナ配置をアンテナ配置保持部3に記録するアンテナ移動部7などを設ける。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
周波数検出方法及び装置
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
追尾装置及びコンピュータプログラム及び追尾方法
【課題】正しい相関決定を実施する。
【解決手段】探知データ取得部110は、時刻ごとにセンサから探知データ512を取得する。航跡データ記憶部120は、航跡データ(航跡群521)を格納する。ゲート計算部131は、航跡データから計算した航跡の予測位置に基づくゲートを計算する。ゲート内外判定部132は、探知データが前記ゲート内に入るかどうかを判定する。相関尤度計算部133は、航跡が初探知データのみから構成される場合は、探知データ取得部110によって取得された前記探知データ情報に基づいて第二探知データとの相関尤度を計算し、航跡が初探知データ以降の探知データからも構成される場合は、航跡の予測位置に基づいて、前記ゲート内に入る探知データとの相関尤度を計算する。
(もっと読む)
二次監視レーダ
【課題】航空機の監視に加え、気象情報を容易に収集する。
【解決手段】モードS二次監視レーダは、航空機に質問信号を送信し、当該質問信号に応答して航空機から送信された応答信号を受信して航空機の飛行を監視する二次監視レーダであって、送信手段と、受信手段と、気象情報取得手段と、位置特定手段と、出力手段とを有する。送信手段は、ロールコール期間にGICBレジスタの気象情報の送信要求を含む質問信号を送信する。受信手段は、航空機から質問信号に応じて送信された応答信号を受信する。気象情報取得手段は、前記受信手段が受信した応答信号から、GICBレジスタの気象情報を取得する。位置特定手段は、前記受信信号が受信した応答信号から、航空機の位置情報を特定する。出力手段は、前記気象情報取得手段で取得された気象情報を、前記位置特定手段で算出された位置情報と関連づけて出力する。
(もっと読む)
レーダ装置
【課題】部品点数の増加を抑えて、ナイキスト周波数による折り返しで発生した信号成分を検出する。
【解決手段】複数のアンテナの送受信波に基づいてターゲットの検出信号を生成する検出信号生成部と、生成されたターゲットの検出信号に対して周波数解析を行い、ターゲットの信号成分を抽出し、該信号成分に対して所定の処理を実行することで、ターゲットまでの距離、ターゲットとの相対速度、ターゲットの方位のうち少なくとも何れか一つを算出する検出信号処理部と、を備え、検出信号生成部は、ナイキスト周波数よりも高い周波数帯域において各アンテナに対応する検出信号に変化を与えるフィルタ部を有し、検出信号処理部は、フィルタ部によって変化が与えられた各アンテナに対応する検出信号から信号成分を取得することで、該信号成分がナイキスト周波数による折り返しで発生した信号成分か否かを判定する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
レーダ装置、検査システム、及び検査方法
【課題】レーダ装置の検査を実施する環境として適切であるか否かを判定可能とすること。
【解決手段】レーダ装置30で実行する信号解析処理では、動作モードが環境検査モードであれば(S210:YES)、比較固有値λMの各々について固有値比SlMを算出する(S220)。この固有値比SlMは、強い相関を有する到来波に対応する固有値λ同士の間で導出されたものであれば小さな値となり、到来波に対応する固有値λと熱雑音に対応する固有値λとの間で導出されたものであれば大きな値となる。そして、基準閾値Th以下となる固有値比SlMが存在しなければ(S230:NO)、軸検査を実施する環境として適している旨を出力し(S240)、基準閾値Th以下となる固有値比SlMが1つでも存在すれば(S230:YES)、軸検査を実施する環境として不適である旨を出力する(S250)。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
地下探査装置および地下探査方法
【課題】電磁波を利用して長い探査距離を実現し、かつ地下水面以下でも探査を行うことが可能な地下探査装置および地下探査方法の提供。
【解決手段】電磁波Wを地中に送信する送信機2と、送信機2から送信され、地中を透過した電磁波Wを受信する受信機3と、受信機3により受信した電磁波の速度および振幅の測定値から地中の物性を判定する判定装置としてのPC5とを有し、送信機2または受信機3の一方は地表に配置され、他方は地中の埋設管P内に配置される。
(もっと読む)
車両の監視方法及び監視装置
【課題】新規な原理を用いた車両の周辺を監視する装置を実現する。
【解決手段】車両のボディを励振信号で励振する送信装置と車両のボディに近接して電磁波を受信する受信装置とを有する。受信装置は、復調器30と、目標周波数設定レジスタと、目標位相設定レジスタを有する。目標周波数と目標位相とに一致した周波数と位相の基準信号を出力するパルス発振器と、基準信号と送信監視信号との位相差を示す位相差信号を出力する位相比較器32を有する。位相差信号の時間変動から基準信号と送信監視信号の周波数差をもとめ、パルス発振器の目標周波数を制御する周波数制御装置と、位相差信号の示す位相差に基づいてパルス発振器の目標位相を制御する位相制御装置を有する。目標位相を、異なる時刻で検出し、その変動量が所定値以上か否かを判定し、変動量が所定値以上であると判定された場合には、車両の周辺に異常が発生したとして、警報する。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
パッシブレーダ装置、誘導装置及び電波検出方法
【課題】 目標からのレーダ波の開始周波数を高い精度で検出し、その開始周波数を用いてパルス圧縮を行うことが可能なパッシブレーダ装置、誘導装置及び電波検出方法を提供する。
【解決手段】 パッシブレーダ装置は、受信部、パルス圧縮部、ピーク選択部、フーリエ変換部、パラメータ抽出部及び再パルス圧縮部を具備する。受信部は、電波を受信し、受信信号に変換する。パルス圧縮部は、チャープレート及び開始周波数の概算値に基づいて、受信信号に対してパルス圧縮を行う。ピーク選択部は、パルス圧縮波形に含まれるピークから所定のピークを抽出する。フーリエ変換部は、抽出したピークに対してフーリエ変換を行う。パラメータ抽出部は、フーリエ変換後のパルススペクトルに基づいて開始周波数を検出する。再パルス圧縮部は、検出された開始周波数とチャープレートとに基づいて受信信号に対して再度のパルス圧縮を行う。
(もっと読む)
情報表示装置
【課題】所定の地点の近傍の詳細な情報と当該地点の遠方の情報とを同時に表示可能な情報表示装置を提供する。
【解決手段】レーダ指示器(情報表示装置)は、取得部と、制御部と、を備える。取得部は、移動体(他の船舶)、移動時(航海時)の目印となるランドマーク、及びユーザに登録されたポイント(ユーザ登録ポイント)のうち少なくとも1つからなる表示対象の位置情報を取得する。制御部は、自船の位置情報及び自船の周辺情報をレーダ映像表示領域35aに表示するとともに、表示対象の位置がレーダ映像表示領域35aの外側となる少なくとも1つの表示対象を、表示対象が位置する方向に対応させて、レーダ映像表示領域35aの外周部35bに表示する。
(もっと読む)
向き推定方法、向き推定装置及び端末装置
【課題】利用者の向きを推定することを課題とする。
【解決手段】向き推定サーバ10は、利用者によって携帯される端末装置30に搭載された角速度センサ33Bの出力から得られる相対方位角を記録する。さらに、向き推定サーバ10は、利用者の向きを特定可能な第1の地点における利用者の向きを特定する。さらに、向き推定サーバ10は、記録した相対方位角のうち第1の地点に対応する相対方位角および第1の地点と異なる第2の地点の相対方位角と、第1の地点で特定された利用者の向きとを用いて、第2の地点における利用者の向きを推定する。
(もっと読む)
移動体の速度計測装置
【課題】移動体の移動速度を検出できる範囲を大きく確保でき、かつ、打撃前後の移動体の移動速度、移動体を打撃する物体の速度を同時に計測する。
【解決手段】ドップラーセンサ14を用いて打撃領域の前方から打撃領域に向かって移動するボール2と、打撃領域でボール2を打撃するバット4と、打撃されたあとのボール2とに向けて送信波W1を送信し、バット4とボール2とで反射された反射波W2を受信してドップラー信号Sdを検出する。ドップラー信号Sdから変換された中間データは蓄積部30に時間経過に従って順番に予め定められた蓄積期間分蓄積される。計測部18は、蓄積部30に蓄積された中間データに基づいて打撃時点を特定し、ボール2がアンテナ12に接近する方向に移動する接近速度、ボール2がアンテナ12から離間する方向に移動する離間速度、バット4の速度である物体速度を算出する。
(もっと読む)
81 - 100 / 1,302
[ Back to top ]