
Fターム[5J070AH31]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | デジタル処理を行なうもの (1,302)
Fターム[5J070AH31]に分類される特許
121 - 140 / 1,302
レーダ装置及びアレーアンテナ
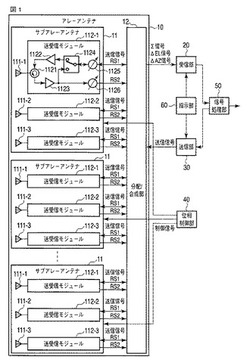
【課題】 原点及び原点近傍の同一座標上に配置されるアンテナ素子へ与える位相が複雑であっても、その位相制御が容易なレーダ装置及びアレーアンテナを提供する。
【解決手段】 レーダ装置は、アレーアンテナ、送信部、受信部、位相制御部及び信号処理部を具備する。アレーアンテナは、アンテナ素子と送受信モジュールとが予め設定された数だけ整列されて成る第1及び第2のサブアレーアンテナを複数備え、アンテナ開口の中心線近傍では、第1及び第2のサブアレーが混同して配置される。送信部は、送信信号を生成してアレーアンテナへ出力する。受信部は、アレーアンテナで受信された受信信号に対して受信処理を行う。位相制御部は、第1のサブアレーと、第2のサブアレーとが逆位相となり、アンテナ開口でのΔ信号の振幅分布がアンテナ開口の中心線近傍で小さくなるように送受信モジュールを制御する。信号処理部は、受信信号から所望信号を取得する処理を行う。
(もっと読む)
電波装置

【課題】複数の構成品を備える電波装置に関して補正データの更新忘れを防止する。
【解決手段】電波装置は、複数の構成品と、信号処理部とを備える。複数の構成品の各々は、不揮発性メモリを備え、その不揮発性メモリには、構成品の個体毎に異なる特性を補正するための補正データが格納されている。コンフィグレーション作業において、信号処理部は、複数の構成品の各々の不揮発性メモリから補正データを取得し、取得した補正データに基づいて各々の構成品の特性を補正する。
(もっと読む)
自動水栓装置
【課題】電波の導波経路からの電波の漏れを無くして、誤検知を発生しない自動水栓装置を提供する。
【解決手段】吐水口、及び取付面に設置するための取付部、を有するスパウト本体と、スパウト本体内に隣接して配置された通水路及び導波路と、導波路を通して電波を送受信する電波センサであって、取付部に対して吐水口とは反対側にスパウト本体から露出した状態で導波路の端部に取り付けられており、導波路の端部に取り付けられた状態で取付面のスパウト取付孔を通過可能に構成された電波センサと、が一体的に組合わされたスパウトユニットと、電波センサの検知信号に基づいて、通水路に接続された電磁弁を駆動して吐水口からの洗浄水の吐水及び止水を実行する制御部と、を有する自動水栓装置において、導波路と通水管との間に、導波路の振動を吸収する弾性部材が設けられている。
(もっと読む)
車載レーダ装置
【課題】自車の走行に支障をきたす障害物と、障害になり得ない停止物とを精度よく区別して、衝突回避装置若しくは衝突被害軽減装置に於ける誤作動を防止させることのできる車載レーダ装置を得ることを目的とする。
【構成】所定の演算周期毎に前記物体の識別を行う物体識別部と、前記物体識別部が識別した前記物体と前記車両との間の相対的状態を判定するとともに、その判定結果に基づいて、次回の前記演算周期に於いて前記第1の角度検出部と前記第2の角度検出部とのうちの一方から他方へ切り替えて前記物体識別部に前記入射角度の値を入力する切り替え制御を行なう状態判定部とを備えた。
(もっと読む)
パルスレーダ装置及びその制御方法
【課題】対象物情報を常時検出可能にするとともにノイズ信号のレプリカ信号を逐次更新することで対象物の情報を高精度に検出することが可能なパルスレーダ装置及びその制御方法を提供する。
【解決手段】ステップS5で距離データの組数n1が全距離データの組数Nrを超えたと判定されると、対象物情報検出の処理が終了したと判定してレプリカ信号作成の処理に進む。ステップS13、S15、S16でレーダ機能を動作させてステップS17で距離データ毎ノイズ信号を取得する。その後、ステップS19、S21、S23でそれぞれ第1、第2、第3バックグラウンド信号を作成した後、ステップS23でレプリカ信号を作成する。
(もっと読む)
ホログラフィックレーダ
【課題】物標が移動している場合には、総経路長差に差が生じ、ホログラフィック合成ができないという問題が生じていた。
【解決手段】本発明のホログラフィックレーダは、第1及び第2の送信波を送信する送信部(S)と、第1及び第2の反射波を受信する受信部(R)と、第1の送信波を送信してから第2の送信波を送信するまでの時間間隔である送信周期を変えて、第1及び第2の送信波を複数回送信するように第1及び第2の送信アンテナを制御する送信波制御部(50)と、送信波を複数回送信した場合の物標からの反射波の検出状況から求められる各周波数ピークに含まれる物標の相対速度に基づき、物標が複数であった場合にその相対速度差から最も適している送信時間間隔の送信周期を選択し、選択した送信周期で第1及び第2の送信波を送信した場合の第1及び第2の反射波を合成して物標の検出を行う方位演算部(11)と、を有することを特徴とする。
(もっと読む)
FMCWレーダ装置
【課題】実際には存在していない目標物を誤検出することなく、遠方に存在している目標物についても、正確に距離及び相対速度を算出することができるFMCWレーダ装置を得ることを目的とする。
【解決手段】FMCW信号源1がPLLで構成されて、高周波信号の周波数の時間変化が直線的に上昇するアップチャープと、高周波信号の周波数の時間変化が直線的に下降するダウンチャープとが実行されるものであり、アップチャープにおけるPLLの設定周波数の切替間隔が、ダウンチャープにおけるPLLの設定周波数の切替間隔と異なっている。
(もっと読む)
データ収集装置、データ収集方法および計測装置
【課題】センサからの計測信号を高速かつ正確にA/D変換を行うことができるデータ収集装置およびデータ収集方法、およびデータ収集装置を組み込んだ計測装置を提供する。
【解決手段】データ収集装置は、計測センサにおいて第1クロック信号に基づいて計測条件が順次周期的に切り替わることで得られる、前記計測条件に対応する計測信号が連なった一連の計測信号の入力を受け、第2クロック信号のタイミングでA/D変換を行い順次レジスタに重ね書きして一時記憶するA/D変換ユニットと、前記第1クロック信号に基づいて生成されるサンプリングパルスのタイミングで、レジスタに一時記憶した計測信号を読み出し、前記サンプリングパルスのパルス発生回数に応じて定まる格納位置に記憶するメモリと、を有する。計測装置は、例えば、計測センサとして用いるレーダと、上記データ収集装置とを含むレーダ装置である。
(もっと読む)
方位測定装置
【課題】電磁波を目標物に照射し、目標物によって反射された電磁波を受信して目標物の方向を測定する方向測定装置において、構成を簡素にすること。
【解決手段】発振器10はパルス波である信号を生成し、送信アンテナ11は漏れ波アンテナである。この漏れ波アンテナは周波数によりビーム方向が変化する。パルス波は周波数的に広がりを持っているため、信号の放射方向も周波数により異なることとなる。その結果、目標物によって反射されて受信アンテナ12により受信された信号は、目標物の方位によって異なる周波数スペクトルを有する。受信した信号をBPF14A〜Cにそれぞれ透過させて信号強度を測定することで、目標物が3方向のいずれの方位にあるかを検知することができる。
(もっと読む)
レーダ装置及び該レーダ装置に用いられるレーダ信号処理装置
【課題】複数の受信データを同時に処理可能な信号処理部を有する場合の信号処理の効率が改善されるレーダ装置を提供する。
【解決手段】空中線装置11からビーム受信信号r1 ,r2 ,…,rN が出力され、受信処理端末121 ,122 ,…,12N で処理が行われ、受信データ(IQデータu1 ,u2 ,…,uN )が生成される。IQデータu1 ,u2 ,…,uN のうち、たとえばIQデータu1 ,u2 のみが信号処理負荷調整手段(ネットワークスイッチ13)を経て信号処理端末141 へ送出され、目標検出データv1 ,v2 が生成されて表示処理装置4へ送出される。また、IQデータuN のみがネットワークスイッチ13を経て信号処理端末14M へ送出され、目標検出データvN が生成されて表示処理装置4へ送出される。表示処理装置4では、目標検出データv1 ,v2 ,…,vN に基づいて処理されて表示される。
(もっと読む)
レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラム
【課題】軸ずれ判定に用いる物標の条件に拘束されないレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【解決手段】物標の方向をアンテナ3の受信信号に基づいて特定するレーダ装置1用の演算装置15であって、前記アンテナ3を搭載した移動体が移動中に前記受信信号によって測位される物標のデータから、前記移動体の進行方向に対する物標の横方向への相対的な移動の大きさを算出し、前記レーダ装置1の走査方向の基準軸と前記移動体の進行方向の基準軸との相対的な傾きを前記移動の大きさに基づいて評価する演算部6を備える。
(もっと読む)
パルスレーダ装置及びその制御方法
【課題】多ピンコネクタを用いて装置を小型に実現しつつ、受信強度を超過する干渉ノイズ信号を低減し、かつ、該干渉ノイズ信号のレプリカを高速に更新し、物体検出を確実に実施することが可能なパルスレーダ装置及びその制御方法を提供する。
【解決手段】対象物情報検出処理を行うときは、高周波送信部110で送信信号を生成するパルス繰返し周期Tplsに第1のパルス繰返し周期Tpを設定し、レプリカ信号作成するときは、周期Tpより短いパルス繰返し周期Tplsに第2のパルス繰返し周期Tzを設定し、処理を行う。
(もっと読む)
ビーム管理装置及びこれを備えたレーダ装置並びにビーム管理方法及びプログラム
【課題】 特定のAPAAに割り当てられた追尾目標が増加した場合でも、他のAPAAの捜索性能を保ちながら、追尾目標に対する追尾ビームの照射頻度を維持する。
【解決手段】 ビーム管理装置10は、予め定められた捜索ビーム及び追尾ビームの照射タイミングからなる基本照射スケジュールaを記憶する基本照射スケジュール記憶手段11と、APAAに割り当てられた追尾目標bを入力する追尾目標入力手段12と、割り当てられた追尾目標bの数が増加し、予め定められた追尾ビームの数を越えた場合に、捜索ビームの照射に要する時間を短縮し、余った時間を追尾ビームの照射に利用するように照射スケジュールcを算出する照射スケジュール算出手段13と、を備えたことを特徴とする。
(もっと読む)
受信機
【課題】回路規模の増大化を抑え、受信利得を計測可能とした受信機を提供する。
【解決手段】受信機において、受信モードのとき、レーダ装置の信号発生部で生成されるレーダ送信信号が物体から反射されて受信アンテナに受信された受信信号と、レーダ送信信号とを混合し周波数差信号を生成すると共に、検査モードのとき、計測用信号と信号発生器で生成される基準信号とを混合し周波数差信号を生成する第1のミキサと、信号発生器で生成される基準信号に基づき計測用信号を生成し、受信信号として入力する計測用信号生成部とを備える。
(もっと読む)
物標を探知して表示する装置
【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
誘導装置
【課題】 従来の誘導装置は、目標に向けて垂直偏波と水平偏波の電波を送信して、目標から反射してきた信号を受信し、受信信号を偏波信号処理することでクラッタ信号の中から偏波特性の違う目標信号を検出して追尾する。しかし、海上の波が複数の周期性を含む場合には、クラッタの偏波特性があいまいとなって、偏波信号処理によるクラッタ抑圧効果が得られず、目標信号を検出できないという課題があった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、誘導装置が偏波信号処理によってクラッタ信号の中から目標信号を検出する際に、予めドップラ信号処理によってクラッタの周波数成分を分解してクラッタの偏波特性のあいまいさを低減する。これにより、偏波信号処理時の目標検出性能を向上することを可能とした。
(もっと読む)
物標を探知して表示する装置
【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
FM−CWレーダ装置及びそれに用いる移動目標信号検出方法
【課題】 同一距離に不要信号が存在する環境下でも移動目標信号を検出可能なFM−CWレーダ装置を提供する。
【解決手段】 FM−CWレーダ装置は、連続波信号と反射信号とを混合した信号から一定の時間毎に得られるスペクトラムを同じビート周波数毎に時間方向にそれぞれ正規化処理を行う正規化処理器(20)と、正規化処理器にて得られた時間対ビート周波数の2次元平面において線分検出を行う線分検出器(21)と、線分検出器にて検出された線分から所定の時刻のビート周波数を推定する周波数推定器(22)と、周波数推定器にて得られたビート周波数から目標の距離と速度とを計算する距離・速度検出器(23)とを有する。
(もっと読む)
目標検出装置
【課題】 複数種類のセンサを組み合わせて双方の目標検出情報に基づいて目標検出の閾値を可変調整することにより、目標からの反射波あるいは物理的なエネルギー波の強度が低い目標の場合でも、目標の検出を可能にする。
【解決手段】 第1のセンサからの受信信号を入力し、該受信信号より目標を検出し、第1の目標検出情報を出力する第1の目標検出器と、第1の目標検出器とは異なる物理的性質をもつ第2のセンサからの受信信号を入力し、該受信信号より目標を検出し第2の目標検出情報を出力する第2の目標検出器と、第1の目標検出器及び第2の目標検出器からの目標検出情報を入力とし、最終的に目標が存在するか否かを判定し、判定結果を出力するとともに、判定結果に基づき、修正された目標検出のための閾値を第1の目標検出器並びに第2の目標検出器に対して出力する目標探知判定器を備える。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及びプログラム
【課題】精度の良い方位検出ができる電子走査型レーダ装置、受信波方向推定方法及びプログラムを提供する。
【解決手段】同じビート周波数として示される周波数ポイントであって、第1の方位スペクトルを算出した周波数ポイントに対応する周波数ポイントにおいて、第1の方位スペクトルを算出する処理において定めた次数より低い次数に定めた第2の方位スペクトルが算出される。ターゲット抽出部が、第1の方位スペクトルが算出された周波数ポイントに対応する複数のピーク間の相対角度と、第2の方位スペクトルのピークが示すピーク角度とから複数のピーク間の相対レベル差を算出する。そして、電子走査型レーダ装置は、複数のピーク間の相対レベル差に基づいて、ターゲットを検出する。
(もっと読む)
121 - 140 / 1,302
[ Back to top ]