
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
201 - 220 / 350
画像レーダ装置
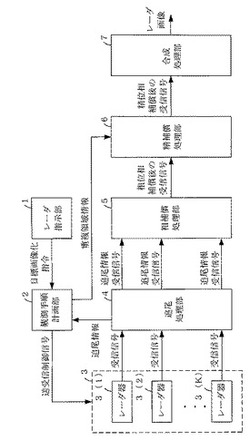
【課題】雑音等の外乱の影響を抑えて補償量を推定し、高分解能なレーダ画像を生成する画像レーダ装置を得る。
【解決手段】複数のレーダ器3により同一の目標を観測して得られる受信信号を合成してレーダ画像を生成する際に、受信信号に基づいて目標の追尾情報を生成する追尾処理部4と、性能要求、レーダ器緒元および追尾情報に基づいて、各レーダ器3の受信信号が空間周波数領域で部分的に重複するように送受信制御パラメータを決定し、重複する空間周波数領域に関する重複領域情報を生成する観測手順計画部2と、追尾情報に基づいて各レーダ器3の受信信号の粗位相補償を行う粗補償処理部5と、重複領域情報に基づいて所定の評価指標を最小化することにより粗補償処理された受信信号の精位相補償を行う精補償処理部6と、精補償後の受信信号を合成し、高分解能なレーダ画像を生成する合成処理部7とを備える。
(もっと読む)
検査方法及び検査装置

【課題】送信アンテナから受信アンテナに直接到来する干渉波の影響を抑制する。
【解決手段】検査装置は、直線S1に沿って配列された送信アンテナ21−1〜21−4、直線S1に平行な直線S2に沿って配列された受信アンテナ22−1〜22−4、送信信号を生成する発振器、送信信号が入力される検波器、スイッチ、画像処理装置を具備する。送信アンテナ21−1は、送信信号に基づいて電波を出力する。受信アンテナ22−2は、受信した電波に基づいて受信信号を出力する。スイッチは、送信アンテナ21−1と発振器が接続されているときに、受信アンテナ22−2と検波器とを接続する。検波器は、受信信号に基づいて検波信号を生成する。画像処理装置は、検波信号に基づいて画像のデータを生成する。送信アンテナ21−1と受信アンテナ22−2との距離は、送信アンテナ21−1と受信アンテナ22−1との距離より長い。
(もっと読む)
地理空間モデルの周波数領域データにおける空隙の非線形修復を提供する地理空間モデリング・システム、及び関連した方法
地理空間モデリング・システム(20)は、地理空間モデル・データベース(21)、及びプロセッサ(22)を含み得る。特に、プロセッサ(22)は、少なくとも一空隙から少なくとも一空隙にコンター・データを伝播することに基づいて、地理空間モデル周波数領域データ(101)における少なくとも1つの空隙(102)にデータを修復し、地理空間モデル周波数領域データを、修復後に、地理空間モデル空間領域データ(110b)に変換するために地理空間モデル・データベース(21)と協調することができる。  (もっと読む)
(もっと読む)
レーダ装置
【課題】受信レベルの大きさを比較することで周波数の正負の判定を可能にして、送信周波数の増加中または下降中の組み合わせ処理を不要にしたレーダ装置を得る。
【解決手段】送信波を送信する送信部と、送信波の反射物体6からの反射波を並列に受信する複数の受信部と、送信波と各受信部で受信された受信波とから、受信部ごとのビート信号を取得するビート信号生成部と、受信部ごとのビート信号を個別に処理するビート信号処理部20と、ビート信号処理結果をDBF処理するDBF処理部23と、DBF処理結果またはビート信号処理結果の周波数成分から、反射物体6の距離、速度、角度の情報を取得する物体検出部24とを備え、ビート信号処理部20は、位相補正処理部22を含む。受信部ごとの位相遅れ量は、相互に異なる値に設定され、位相補正処理部22は、ビート信号処理部20での受信部ごとに対応した位相遅れ量が等しくなるように補正する。
(もっと読む)
移動目標検出装置
【課題】演算処理規模の増加を抑えつつ、結像度の高いSAR画像を得ることができる移動目標検出装置を提供する。
【解決手段】合成開口を分割するマルチルック処理によって得られた複数の画像間の差を用いた移動目標検出処理により移動目標存在領域を抽出し、該抽出した移動目標存在領域のマルチルック間の移動ベクトルとマルチルック間の観測時間差とにより速度ベクトルを算出し、該算出した速度ベクトルに基づきクロスレンジ方向の参照信号の補正値を算出する補正値処理部5と、補正値処理部で算出された補正値を用いて補正された参照信号を生成する参照信号処理部6と、参照信号処理部からの補正された参照信号を用いて移動目標存在領域に対する合成開口画像を算出し、この合成開口全体の合成開口画像と合成する処理部1〜4、7を備える。
(もっと読む)
踏切障害物検知装置
【課題】踏切道内の障害物の誤検知を防いで確実に障害物を検知する。
【解決手段】踏切遮断機8の近傍に設けたセンサユニット2の面センサ5から標準反射体4にミリ波ビームを照射する。標準反射体4からの反射ビームの受信信号から反射強度計測部12で標準反射体4からの反射強度を計測し、計測した反射強度と検知条件記憶部11に記憶した基準反射強度に対する変化を反射強度判定部14で判定する。この反射強度の変化に応じて面センサ5の受信信号から障害物を検知するための閾値を閾値補正部15で補正して面センサ5の水平方向の検知領域を踏切道内に絞り、障害物検知の死角をなくすとともに踏切遮断機外の物体や遮断桿を障害物として検知することを防ぐ。
(もっと読む)
合成開口レーダ装置
【課題】演算処理規模の増加を抑えつつ、結像度の高いSAR画像を得ることができる合成開口レーダ装置を提供する。
【解決手段】画像信号のピーク値を抽出するピーク値抽出手段5と、ピーク値抽出手段で抽出されたピーク値が第1レベルL1以上の場合は、逆フィルタ(ピーク)法を適用するための補正値を算出し、第1レベルL1未満であって第2レベルL2(L1>L2)以上の場合は、逆フィルタ(平均)法を適用するための補正値を算出し、第2レベルL2未満の場合は、逆フィルタ(レンジ毎)法に適用するためのレンジセル毎の補正値を算出する補正値処理部5と、補正値処理部で算出された補正値を用いて参照信号を補正する参照信号処理部6と、参照信号処理部で補正された参照信号を用いて合成開口処理を行う処理部1〜4とを備える。
(もっと読む)
情報処理装置及び情報処理方法及びプログラム
【課題】航空機や人工衛星等の移動プラットフォームに搭載され、地表面の高分解能画像及び高度情報を得る干渉型合成開口レーダ装置において、自機高度の測定誤差による地表面の高度情報の誤差を推定して補償することを可能とした干渉型合成開口レーダ装置を提供する。
【解決手段】機体の機軸と直交する平面内で直線状に3つ以上のアンテナ1〜3を配置し、この3つのアンテナで受信されたパルス信号及び動揺センサ4の計測結果を用いて3つの合成開口レーダ画像7を取得し、更に、3つのレーダ画像から2つの観測領域の高度情報9を取得し、2ベースラインによる誤差推定部10が、この得られた高度情報の差分から誤差を推定して補償し、インタフェロメトリ再処理部11が、再度干渉型合成開口レーダの処理を行うことにより、地表面の高度誤差が抑圧された誤差抑圧後の観測領域の高度情報12が得られる。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートの検出信号と車速の検出信号とから自車の進行方向に沿う中心線の曲率を推定する手段23、自車の進行方向に沿う曲率とその中心線に与える水平方向の車線幅とから自車進行路の車線形状を設定する手段25、前方車との距離および角度を検出する手段21、自車の進行方向に沿う曲率と前方車との距離に応じて車線形状の水平方向の車線幅を変更する手段(図8のS8)、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、を備える。
(もっと読む)
目標自動検出処理方法および装置
【課題】目標からの反響信号の認識率を確保した上で、ノイズ信号に対する誤警報率を低下させて、トータルとしての自動目標検出性能を向上させる。
【解決手段】認識率向上のために受信信号から生成したスペクトルパターンの重心補正処理を行う前に、重心補正の要否を判定する処理を追加し、本来重心補正が必要ないデータに対しては重心補正しないようにする。重心補正の要否はスペクトルレベルの分布度合いを考慮して決定する。そのため、送信信号と相関のある領域内を指定範囲として事前設定しておき、目標からの反響音の可能性のある信号は指定範囲内に沿った形で高スペクトルレベルを持つが、ノイズ信号は指定範囲内に添う形で高スペクトルレベルが分布しないことに着目して、この指定範囲内でスペクトルレベルのヒストグラムを作成し、あるレベル以上のスペクトル分布の合計値が閾値を越えるかどうかで重心補正の要否を判定する。
(もっと読む)
レーダシステム
【課題】レーダ反射断面積を精度よく演算するレーダシステムを提供する。
【解決手段】本発明は、目標物に向けて電波を送信して、反射してきた電波を受信して信号として出力するレーダ装置18と、前記信号を入力し、前記信号に基づき目標物までの距離と目標物のレーダ反射断面積を演算する演算手段と、前記演算したレーダ反射断面積を前記目標物までの距離に応じて補正する補正手段10を備えたレーダシステムである。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートセンサおよび車速検出手段の検出信号に基づいて自車の進行方向に沿う曲率を推定する手段23、自車進行路の車線幅を設定する手段24、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段25、前方車の位置を検出する手段21、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、ヨーレートセンサの検出誤差を補正する手段(ヨーレートの検出値=推定曲率に対応するゲイン×ヨーレートの出力値に補正する手段31)、を備える。
(もっと読む)
干渉判定方法,FMCWレーダ
【課題】FMCWレーダにおいて、他レーダとの干渉判定の精度を向上させる。
【解決手段】オーバーサンプリングされたビート信号のサンプリングデータを周波数解析した結果に基づき、ターゲットの検出範囲に対応する検出周波数領域より周波数の高い高周波数領域内で、過大判定値を超えるピーク周波数成分を検出する(S210)。検出されたピーク周波数成分の周波数を中心とする周波数幅fdの範囲を過大領域として設定し(S230)、設定された過大領域毎に、その過大領域の一対の領域端での信号強度の平均値を補間値として求め、その過大領域に属する全ての周波数成分の信号強度を補間値に置き換えた後(S240)、高周波数領域の全体に渡って周波数成分の強度を積分し(S250)、その積分値に基づいて、他レーダとの干渉の有無を判定する。
(もっと読む)
車載用レーダ装置
【課題】前方のターゲット存在有無や走行環境に依らずに、車載用レーダ装置のアンテナ及び受信系の位相誤差を検出・補正し、レーダの検出精度の低下を防ぐことができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置は、ターゲット以外から副次的に到来する受信波の位相を予め記憶する位相記憶手段12と、電波の送信タイミングにより決定される電波受信タイミングに基づいて受信波を取り込む受信波取り込み手段13と、この受信波取り込み手段により取り込まれた受信波の位相を求める位相検出手段14と、位相記憶手段12により予め記憶した位相と位相検出手段14より検出した位相とを比較して素子アンテナ毎の位相補正量を抽出して記憶する位相補正量抽出手段15と、この位相補正量抽出手段により得られた位相補正量に基づき各素子アンテナの受信信号の位相を補正する位相補正手段16とを備えている。
(もっと読む)
車両用障害物検知装置
【課題】車両のフロントエンド部分に配置されたレーダユニットの基準検知軸の方向が所期方向からずれている場合に、その基準検知軸を自動的に確実に補正し調整することができる、車両用障害物検知装置を提供する。
【解決手段】カメラユニット3で撮像された車両前方の特定障害物OSの画像情報に基づいて、その特定障害物OSの位置を検知し、この検知された特定障害物OSの位置とレーダユニット2で検知された同特定障害物OSの位置が一致するか否か判定し、その判定を受けて特定障害物OSの位置が一致しない場合に一致するように、レーダユニット2の基準検知軸BArを自動的に補正する。
(もっと読む)
背景画像作成装置
【課題】本発明は自動車等の移動体を検出する際使用する、移動体検出領域の背景画像を作成する背景画像作成装置に関し、特に車両で渋滞した道路や停止時間が長い車両が存在する場合でも、精度のよい背景画像の作成を行うことができる背景画像作成装置を提供するものである。
【解決手段】本発明はレーダ4によって検出領域1の情報を取得し、移動体検出部5に当該情報を送り、検出領域1上に存在する移動体2の位置を検出し、移動体2周辺の一定範囲を除く領域を非存在領域特定部6によって特定する。また、この時の検出領域1の情報を取得し、背景画像生成部7によって移動体2を含まない領域を背景画像として精度よく生成する。その後、カメラ3によって検出領域1の情報を取得し、上記生成の背景画像と差分処理部9において両画像の差分を検出することによって移動体2の正確な位置を検出することができる。
(もっと読む)
レーダ装置
【課題】方位方向に加えて仰角方向の角度誤差を測定でき、プラットフォームが移動していても角度誤差を測定できるレーダ装置を得る。
【解決手段】移動するプラットフォーム1に搭載され、基準目標3に対し電磁波ビームを放射し基準目標からの散乱波を観測する送受信アンテナ2、放射ビームを制御するビーム制御手段8、送受信アンテナに送信信号を送信すると共に、送受信アンテナにより受信される基準目標の信号強度の観測値を得る送受信機9、アンテナ利得の角度特性を記憶した第1のデータベース10、基準目標の座標と電気的特性を記憶した第2のデータベース11、ビーム制御手段による制御値、第1及び第2のデータベースの記憶値、プラットフォームの座標及び姿勢角に基づき基準目標からの信号電力を予測する予測手段12、信号強度の観測値と予予測値との照合に基づき送受信アンテナの取付誤差角度を推定する照合手段13を備える。
(もっと読む)
SAR画像の3D形状算出装置及びSAR画像の歪補正装置
【課題】SAR画像について精度の高い形状推定を行うことも目的とする。また、SAR画像のレイオーバーについて補正を行うことを目的とする。
【解決手段】同一方向からスクイント角を変えて撮像を行うことで得た、同一個所を撮像した2枚以上のSAR画像を入力画像として用い、SAR画像の3D形状の推定を行う。また、推定した3D形状と、入力画像とに基づき、フォアショートニングと光学の倒れこみの補正を行うとともに、複数の入力画像における対応点の相関から、歪補正後の画素の輝度を算出し、レイオーバーを補正する。
(もっと読む)
センサのバイアス誤差推定装置
【課題】バイアス誤差を、センサを中心とした直交座標系においてオイラー角で定義する場合、バイアス誤差推定方式で定式化した際に観測行列の階数が足りず、正則とならないため、3次元の位置の観測値だけではバイアス誤差を推定することができない。
【解決手段】センサで観測した3次元の観測値からX、Y、Z軸の回転角のうち、1軸バイアス誤差補正器5により、1軸の回転角について取り得る範囲で複数パターン想定し、あらかじめ1軸の回転角のみ補正した観測値を求め、この補正後の観測値を用いて、2軸バイアス誤差補正器7により残りの2軸の回転角を推定する。2軸バイアス誤差補正器群8で推定した2軸の回転角と、1軸バイアス誤差補正器5で補正した1軸の回転角を1つの組合せとして、その中から最適なX、Y、Z軸の回転角を選択する推定値評価器9を設けて、バイアス誤差を推定するようにした。
(もっと読む)
標高モデル生成装置、標高モデル生成方法および標高モデル生成プログラム
【課題】航空機、人工衛星等の移動プラットフォームに搭載した合成開口レーダによって取得した画像データ及び地表面表層データ(地物を含んだ標高)を使って、地物を抽出及び除去して、地表面標高データ(地物を除いた標高)を作成する。
【解決手段】データ格納部110は画像データ及び地表面表層データを複数セルに分割して、セル毎に画像データの強度情報と地表表層データの高度情報を記憶装置190に格納する。データ選択部120は所定の強度以上のセルを抽出する。地物背面セル選択部130はデータ取得時の撮像方向を参照して、地物背面セルを選択する。地物セル生成部140はデータ選択部120が抽出したセルと地物背面セル選択部130が選択した地物背面セルとをもとに地物の輪郭線を生成する。データ置換部150は地物セルの標高データを地物セル周辺の標高データの平均値に置換して地表面標高データを生成する。
(もっと読む)
201 - 220 / 350
[ Back to top ]