
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
281 - 300 / 350
物体検知装置および方法

【課題】検知領域の上下の傾きが生じる場合でも、簡単に、かつ確実に物体を検知することができるようにする。
【解決手段】車両11のレーザレーダは、垂直領域81乃至85にレーザ光が照射するようにレーザ光をスキャンする。レーザ光は、車両12によって反射され、車両11のレーザレーダによって受光される。レーザレーダは、垂直領域81乃至85のそれぞれの領域毎の受光量の中から、受光量が最大となる垂直領域(例えば、垂直領域84)を検出する。レーザレーダは、検出された垂直領域84の位置が垂直領域81乃至85の中心の領域83に位置するように、光軸ズレを補正する。本発明は、車両用レーザレーダに適用することができる。
(もっと読む)
車載レーダ装置

【課題】消失した物標の位置を適正に補完できる「車載レーダ装置」を提供する。
【解決手段】物標検出部2は、T1、T2、T3においてレーダ計測信号処理部13によって検出されていた物標Aが、T4において検出されなくなった場合、T4において自車が停車中であれば、最後の物標Aを検出したT3において物標Aが停車中であり、T3以前において物標Aが所定頻度で検出されていたかどうかを調べる。そして、T3において物標Aが停車中であり、T3以前において物標Aが所定頻度で検出されていた場合、自車が発車するか物標Aは発射して物標Aが再検出される(T8)までの間(T4、T5、T6、T7)、T3において最後に物標Aを検出した位置に、物標Aの位置を補完する。
(もっと読む)
車載用レーダ装置
【課題】車両走行状態と位置センサの出力とから得られる軸ズレを補償してアンテナの方向を制御することで、検知精度を向上させた車載用レーダ装置を提供する。
【解決手段】電磁波を送信するとともに、反射波を受信するアンテナ2と、送受信波から物体を検知する物体検知手段(ECU7)と、車両の走行状態を取得する走行状態取得手段(ECU7)と、走行状態から電磁波の照射方向を設定する照射方向設定手段(ECU7)と、照射方向からアンテナ2の方向を変更するアンテナ駆動用アクチュエータ4と、アンテナ2の位置を検知する位置センサ3と、走行状態とアンテナ2の位置とからアンテナ2の方向と電磁波の照射方向との軸ズレを求める軸ズレ算出手段(ECU7)と、アンテナ2の基準位置を記憶するとともに、軸ズレを記憶する記憶手段(ECU7)とを備え、照射方向変更手段は、軸ズレを補償してアンテナ2の方向を変更するものである。
(もっと読む)
レーダ装置
【課題】応答性の劣化を抑制しつつ精度良く物標位置の算出を行うことのできる「レーダ装置」を提供する。
【解決手段】物標位置補正部24は、物標位置予測部23によって今回の予測相対位置Pftが予測されているときに、レーダ測位部10によって今回の計測相対位置として図中のPOtが算出されると、今回の相対位置Ptとして、計測相対位置POtと予測相対位置Pftとを結ぶ線分上の位置を算出する。ここで、物標位置補正部24は、計測相対位置POtまでの距離Qが小さいほど、また、物標の今までの追尾回数Rが少ないほど、また、計測相対位置POtの方向角と予測相対位置Pftの方向角の差dθの絶対値の今までの平均値φが大きいほど、計測相対位置POtよりの位置となるように相対位置Ptを算出する。
(もっと読む)
レーダ装置とその信号処理方法
【課題】観測対象の速度分布のばらつきが大きい場合でも、高い精度で観測対象の速度を算出する。
【解決手段】パルス繰り返し周波数(PRF)を切り替え可能なレーダ装置にあって、レーダエコーから観測される速度スペクトルをそれぞれ位相差ベクトルに変換する。そして、PRFごとの位相角が観測対象のドップラ速度に比例するということに基づいて、それぞれのPRFの位相差ベクトルにより得られる位相角を基準値であるPRFに基づく値に補正するようにする。これによりPRFによらず速度算出に係る受信データを統一的に扱えるようにし、より多くの受信データを用いてターゲットのドップラ速度を算出するようにする。
(もっと読む)
気象レーダ装置
【課題】送信系の特性変化によらず、正確な雨雪量を算出可能とする。
【解決手段】IF送信信号発生部11に対して指示する送信信号の各種特性に基づいて、送信信号計測部17で計測される計測結果の変化量が許容値を外れる場合に、データ解析部21で特性計測結果に基づいてレーダ定数を自動的に補正することで、送信信号の特性変化に合わせて気象レーダ方程式の精度を高め、正確な雨雪量を算出可能とする。
(もっと読む)
画像レーダ装置
【課題】不要な距離変化を推定する際に、同じレンジに存在する複数の反射点間の干渉の影響で増大する補償量の推定誤差を低減する。
【解決手段】レンジヒストリから時系列データを抽出する時系列データ抽出手段201と、短時間フーリエ変換を適用してドップラヒストリを生成するドップラヒストリ生成手段202と、短時間ドップラヒストリを切り出すヒストリ切出し手段203と、短時間ドップラヒストリからドップラ周波数の変化率を推定するドップラ変化率推定手段204〜206と、ドップラ周波数の変化率に基づいて目標とレーダとの間のレンジの変化を推定するレンジ変化算出手段207と、レンジの変化に基づいて補償量を算出する補償量算出手段208と、補償量に基づいてレンジヒストリの不要なレンジおよび位相の変化を補償する運動補償器21とを有する2次元フーリエ変換補償回路20を備えるものである。
(もっと読む)
無線LAN位置検知サーバ
【課題】 被位置検知端末と無線LANアクセスポイントの間に遮蔽物等がある場合でも位置検知精度を保証することができる位置検知サーバを提供する。
【解決手段】 無線LAN位置検知サーバにおいて、被位置検知端末130の移動範囲内に設置された複数のICタグ140の固定位置情報を格納し、無線LANの通信情報により被位置検知端末130の位置情報を検知する際、被位置検知端末130がICタグリーダ132により読み取ったICタグ140の情報および複数のICタグ140の固定位置情報に基づいて、被位置検知端末130の位置情報を補正する。
(もっと読む)
対地速度測定装置
【課題】、取り付け角度による対地速度の算出の影響を受けず、精度良く直接的に自動車の対地速度を算出することが出来る対地速度測定装置を提供すること
【解決手段】 ドップラセンサ10と、そのドップラセンサから出力されるドップラビート信号fdと、そのドップラセンサが備えたアンテナ12,13の角度に基づいて対地速度を算出する速度検出部20と、所定間隔で配置された反射体の上を通過したときに得られるドップラビート信号の信号強度のレベル変化に基づいて較正速度を求める較正速度検出部30と、速度検出手段で算出される対地速度と、前記較正速度検出手段により求められる較正速度が同じになるようにドップラセンサの入射・反射角を決定する実角度算出部40と、を備え、較正速度に基づいて実角度算出部が実角度を求めた場合には、速度検出手段は、求めた実角度に基づいて対地速度を算出する。
(もっと読む)
干渉型レーダ
【課題】 受信アンテナによる空間分解能を上げずに、感度を向上させた干渉型レーダを提供する。
【解決手段】 目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する大口径アレイアンテナを備えた受信部Rとを有している。前記送信部Tは、目標対象物の方位及び距離を検出するためのFMCW信号を送信アンテナから出力する機能を有している。前記受信部Rは、前記大口径アレイアンテナ2を複数の等しい小ブロックに分割した干渉ブロック9c毎に受信する受信信号に相関処理を行う複数の相関処理部15と、前記複数の相関処理部15から出力される信号の相等しい信号成分同士をベクトル合成する合成器19とを含んでいる。
(もっと読む)
目標物体との距離を確定するための方法および装置
【課題】この発明は、目標物体(200)との距離(R)を確定するための方法に関する。
【解決手段】この方法では、電磁波を送信信号(120a)の形態で送信器(111a)によって送信し、目標物体(200)で反射された送信信号(120a)の少なくとも一部分を、受信信号(120c,120d)の形態で受信器(111b)によって受信し、受信信号(120c,120d)の評価を基準信号(120b)に従って行なう。この基準信号(120b)は、送信信号(120a)に対する周知の位相差および送信信号(120a)と同一の周波数を有する。基準信号(120b)および受信信号(120c,120d)の周波数を、分周器(113)で、基準信号(120b)と受信信号(120c,120d)との間に存在する位相差を維持しつつ、同じ事前設定可能な分周率xだけ減少して、減少された周波数を有する基準信号(120b´)および減少された周波数を有する受信信号(120d´)を得ること、および減少された周波数を有する基準信号(120b´)と、減少された周波数を有する受信信号(120d´)との間の位相差を評価して、距離(R)を確定する。
(もっと読む)
無線方向探知機の較正方法および較正システム
方向探知機で用いる較正データを提供するための較正方法および較正システムを提供する。前記方法は、相互に所定距離離れた較正送信機に対して、較正受信機が円を描くように相対的な動きを行うようにするステップを含む。前記方法はまた、所定の周波数一覧から、特定の周波数を送信するために用いられる通信周波数信号を準備し、送信するステップを含む。前記準備するステップは、(a)前記通信周波数信号の前記ドウェル時間範囲の値を所定値に設定するステップと、(b)前記較正送信機と前記較正受信機との間の前記ドウェル時間範囲を、共通する同期源のクロック信号により時間同期させるステップと、(c)前記周波数を送信するために前記ドウェル時間範囲内にホップ持続期間を設けるステップと、(d)前記ホップ持続期間の間、前記周波数に対応する前記通信周波数信号を生成するステップとを含む。前記較正受信機側では、前記方法は、前記所定の周波数一覧を走査するステップと、前記ドウェル時間範囲内の前記ホップ持続期間の間に送信された周波数信号を傍受するステップと、前記ドウェル時間範囲内で前記ホップ持続期間以外で前記受信機が受信したその他の周波数信号すべてを除去するステップとをさらに含む。  (もっと読む)
(もっと読む)
ネットワークレーダ装置
【課題】 目標検出性能を向上するネットワークレーダ装置を得る。
【解決手段】 レーダアンテナ1a,2aの各々の位置を検出する位置検出部1b,2bと、レーダアンテナ1a,2aの各々のビーム指向方向を制御するビーム制御部1c,2cと、レーダアンテナ1a,2aの各々の位置とビーム指向方向とに基づいてレーダアンテナ1a,2aからの受信信号の到来時刻差を求め、レーダアンテナ1a,2aからの受信信号の到来時刻をその到来時刻差に応じて補正する目標距離補正部11,12と、補正されたレーダアンテナ1a,2aからの受信信号の相関処理を行い、それら受信信号の振幅値に応じて目標の有無を検出するバイナリ積分型目標検出部21とを備えた。バイナリ積分型目標検出部21において、レーダアンテナ1a,2aからの受信信号の相関処理での相関ゲートサイズを小さくすることができ、目標検出性能を向上することができる。
(もっと読む)
情報処理装置、情報処理方法、反射体、および通信システム
【課題】従来の情報処理装置においては、精度良く所定の位置に存在するRFIDタグに選択的な処理を実行させることができないという課題があった。
【解決手段】RFIDタグ1から送信される1つのフレームからなる信号である反射信号を、受信アンテナ4を介して受信する受信処理部6と、受信処理部6において受信した反射信号から、RFIDタグ1の位置に関する情報である位置情報を取得する位置測定部208と、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定し判定結果を取得する位置判定部210と、判定結果に基づいて所定の処理を行なう処理部212とを具備する。
(もっと読む)
複数のレーダをコヒーレントに組み合わせるシステム及び方法
レーダをコヒーレントに結合するシステム及び技法は、各レーダで受信されるコンポジット物標エコーがモノスタティックエコー及びバイスタティックエコーからの寄与分を有することになるように、複数のレーダのうちの1基から送信されたパルスの時間遅延及び位相を調整する位相及びレンジの較正値及び初期化値を生成することを含む。この方法は、引き続き各レーダでコンポジット物標エコーが受信されるように、複数のレーダのうちの1基により後続して送信されるレーダパルスの時間遅延及び位相をさらに調整する位相及びレンジの補正値を予測することをさらに含む。この方法は、コンポジット物標エコーをコヒーレントに加算することをさらに含む。 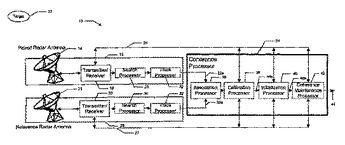 (もっと読む)
(もっと読む)
レーダの軸ずれ量決定装置
【課題】 静止物標の分布に基づくレーダの水平方向軸ずれ量決定において、直線走行からカーブ走行に移行する際にも正確に軸ずれ量を決定する。
【解決手段】 検出された静止物標の2次元的な分布のデータおよび直線走行かカーブ走行かを示すフラグを現在から所定時間前まで時系列的に保持することによって(ステップ1002〜1018)、所定時間前の分布データおよびフラグをそれぞれT_Map(4)およびT_Flag(4)として保持する。現在および所定時間前のいずれにおいても直線走行していたと判定されるときのみ(ステップ1020)所定時間前の分布データT_Map(4)をA_Mapに積算し(ステップ1022)、積算値A_Mapに基いて軸ずれ量を演算する(ステップ1026)。
(もっと読む)
レーダ装置
【課題】 複数本の受信アンテナビームを合成処理することによって、単一の受信ビームの場合と同一の合成開口時間でより広帯域な受信信号を生成し、再生画像のアジマス分解能を改善する。
【解決手段】 受信ビームの中心方向がアジマス方向に異なる複数のアンテナから得られる複数の受信信号から、マルチビームを形成するビーム形成手段と、上記ビーム形成手段で得られたマルチビームを用いてスペクトル合成を行うスペクトル合成手段と、上記スペクトル合成手段の合成信号を逆フーリエ変換した信号に基づいて、Polar Formatアルゴリズムを用いて画像再生処理する画像再生手段とを備える。
(もっと読む)
電波到来方向推定装置及び方法
【課題】 高い相関を有する複数到来波の到来方向を精度良くかつ高速に推定することができる電波到来方向推定装置及び方法を提供する。
【解決手段】 この電波到来方向推定装置は、複数のアンテナ素子から構成されるアレーアンテナと、その各アンテナ素子を介して到来波を受信する受信機と、各受信信号から相関行列を演算する相関行列演算器22と、演算された相関行列に、適当な修正値を特定の行列要素にのみ持つ修正行列を加算する修正行列加算器24と、修正行列が加算された相関行列の逆行列を演算する逆行列演算器26と、演算された逆行列に基づいてウエイトベクトルを演算するウエイトベクトル演算器28と、演算されたウエイトベクトルを用いて角度スペクトラムを演算する角度スペクトラム演算器30と、演算された角度スペクトラムのピーク波形から到来波の到来方向を推定する到来方向推定器32と、を含む。
(もっと読む)
先行車認識装置
【課題】 レーダー装置が電磁波を送信および受信する検知エリアの端部における物体の横方向位置の検知精度を簡単な演算で高める。
【解決手段】 レーダー装置は扇形の検知エリアに入った物体からの反射波の中心を物体の位置として検知する。レーダー装置の検知エリアの端部にターゲットの一部だけが入って検知された場合に、その検知位置はターゲットの中央位置であるB位置からずれたA位置になるが、ターゲットである車両の車幅の半分に相当する距離(例えば0.9m)だけ、前記A位置を横方向外側に移動させたB位置をターゲットの検知位置として算出することで、ターゲットの一部だけが検知エリアに入った場合でも、そのターゲットの横位置を正しく算出することができる。
(もっと読む)
高炉内原料レベル測定装置
【課題】電磁波を利用した高炉内原料レベル測定装置の校正を、高炉に装着したたまの状態で簡単に実施できるようにすること。
【解決手段】電磁波を発振部1から伝播管2を通して高炉B内に放射し、高炉内原料C上面からの反射波を受信することによって発振部1から高炉内原料C上面までの距離を測定する高炉内原料レベル測定装置Aにおいて、伝播管2から高炉Bの途中の箇所であって、発振部1から測定不能距離L以上離れた位置に校正用反射板3aを挿入・退避可能な機構を設ける。通常のレベル測定時には校正用反射板3aを退避させておき、校正時に校正用反射板3aを伝播管2から高炉Bの途中の箇所に挿入させて校正処理を行う。校正用反射板3aとしては、スライド式ゲート弁3のゲート板を用いる。スライド式ゲート弁3の開閉操作は遠隔操作で行う。
(もっと読む)
281 - 300 / 350
[ Back to top ]