
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
321 - 340 / 350
レーダ装置
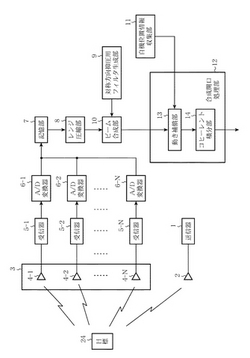
【課題】 走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるようにする。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
(もっと読む)
電子測定方法
本発明よると、電子測定方法の感度は、少なくとも一つのパルス受信周波数を有するパルス電磁放射(ES)の送信、受信信号に変換される反射散乱放射(RS)の受信、受信信号のミキシング、少なくとも一つの出力信号から少なくとも一つの時間パラメータの決定の工程を有するヘテロダイン受信の原理により実行され、改善される。受信信号のミキシングにおいて、少なくとも二つのパルス混合信号が、少なくとも二つの出力信号を与えるために混合され、少なくとも二つの混合信号は互いについて位相シフトしている。 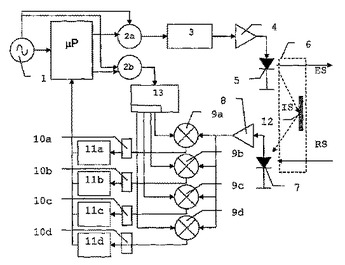 (もっと読む)
(もっと読む)
レーダ装置の制御方法、レーダ装置、プログラム

【課題】 レーダ装置において、対象物の測定精度を向上させる。
【解決手段】 FM−CWレーダ機能とパルスレーダ機能とを併せ備えたレーダ装置において、FM−CWレーダ機能による対象物の測定(ステップ101)と、パルスレーダ機能による対象物の測定(ステップ102)を行い、両者の距離の測定結果を照合し(ステップ103)、この照合結果に基づいて、パルスレーダ機能におけるレンジアンビギュイティの検証(ステップ104)および補正(ステップ105)、FM−CWレーダ機能の誤ペアリングの検証(ステップ106)および補正(ステップ107)、を行うことでレーダ装置による対象物の距離や速度の測定精度を向上させる。
(もっと読む)
ウィンドプロファイラ・システム
【課題】 観測データのうち正常なデータを残し信頼性が低いデータを削除する。
【解決手段】 信号処理装置2は受信した観測データからスペクトルデータを算出しスペクトルデータをモーメントデータに変換する。データ処理装置3はモーメントデータについて品質管理処理を行い、その結果のデータとスペクトルデータとから表示データを作成して観測データの再生を行う。品質管理処理部32は、5方向毎に視線風速の大きさについて高度毎,時間毎に周囲の視線風速の大きさと比較して所定の閾値外のものを排除する時空間チェックと、水平風速の東西成分に対する南北成分の比率について高度毎および時間毎に周囲の正接と比較して所定の閾値外のものを排除する時空間チェックを行う。
(もっと読む)
測角レーダ装置
【課題】2つのアンテナ受信強度に基づいて検知対象物方向の角度を演算する測角レーダ装置において、その角度を精度よく求める。
【解決手段】送信アンテナ4から送信ビームを放射し、検知対象物からの反射ビームを2つの受信アンテナ5a,5bで受信する。受信ビームは、FM−CW送受信装置7及びA/D変換器8を経由して信号処理装置14に入力される。そして、アンテナゲイン差補正部18で、受信リファレンス信号メモリ部17から入力した受信アンテナ5a,5bのゲイン差のデータで受信ビーム強度を補正する。補正された受信ビームは、FFT処理部19で周波数解析され、CFAR処理部20で所定の閾値以上となるビーム強度が検知対象物からの成分として抽出される。周辺ノイズ補正部21は、抽出されたビーム強度から、その周波数近辺におけるビーム強度をノイズ成分として減算する。
(もっと読む)
レーダ装置
【課題】 複数の受信アンテナをスイッチで切り換える構成のレーダ装置において、アンテナ切り換えに起因するノイズの影響を除去する。
【解決手段】 送信増幅器をオフとするなどにより(ステップ1000)、ターゲットからの反射信号がない状態とし、このときのフーリエ変換結果を取り込んで(ステップ1002)、補正値としてメモリに格納する(ステップ1004)。レーダ動作時には、フーリエ変換結果からこの補正値を差し引くことによりアンテナ切り換えに起因するノイズの影響を除くことができる。
(もっと読む)
パルスレーダー装置
【課題】本願発明は、受信パルス波のリークのみならず、パルスレーダー装置内で発生する送信パルスのリークの影響を低減して、リークによる誤検出を防止し、至近距離にある対象物までの距離も精度よく検出することのできるパルスレーダー装置を提供することを目的とする。
【解決手段】上記目的を達成するために、本願発明にかかるパルスレーダー装置は、送信アンテナが出力する送信パルス波やパルス発生回路が出力する送信パルスが受信アンテナや受信回路にリークしている期間は、受信パルスを検出しないように復調回路の出力を遮断する。
(もっと読む)
センシング装置
【課題】侵入者の検出確度を高めたセンシング装置を提供する。
【解決手段】信号波を監視空間に送信する送信部10と、監視空間から受信を行い受信信号として出力する受信部12と、送信部10及び受信部12における送受信に対する複数の伝達関数を記憶する記憶部16と、受信信号を複数の伝達関数に対しそれぞれの逆伝達関数にて演算して複数のデコンボリューション信号を生成するデコンボリューション処理、複数のデコンボリューション信号を合成して合成信号を生成する波形合成処理、合成信号に基づいて監視空間に存在する物体を検出する検出処理を行う信号処理部18とを備えるセンシング装置100によって上記課題を解決できる。
(もっと読む)
車両用のレーダーセンサ
周波数変調されたレーダー信号を送受信する少なくとも1つの送受信器(14、16)と、位置測定された対象物との間隔(di)および相対速度(vi)を計算する評価器(24、48)とを備える、車両用のレーダーセンサにおいて、相対速度(vi’)を独立して測定する統合されたドップラーレーダーシステム(26、42、44)を特徴とする。 (もっと読む)
二次監視レーダシステムとその地上装置
【課題】トランスポンダを確実に捕捉できるようにし、これにより航空機の安全運行への寄与を高め得る二次監視レーダシステムとその地上装置を提供すること。
【解決手段】エラー判定処理においてPIフィールドの値とサイトIDの比較に加え、PIフィールドの値と“0”との比較を行うようにしている。また、サイトIDまたは“0”のいずれと一致したかを区別するための分別情報を、応答信号に付加するようにしている。これにより、モードS専用オールコール質問に対してPIフィールドの値が“0”で応答する不良モードSトランスポンダを捕捉することが可能になる。
(もっと読む)
信号分類装置
【課題】送信源の電波放射停止後に発生する分類の誤りを防止する信号分類装置を得る。
【解決手段】仮説選択手段50からの仮説と信号検出手段10からの信号の時刻情報に基づき電波放射停止と判断された送信源を含む仮説と修正不要仮説を出力する送信停止判断手段60、電波放射停止と判断された送信源に分類されている信号がノイズとして判断された送信源を含む仮説と修正不要仮説を出力するノイズ判断手段70、ノイズと判断された信号をノイズとして分類し直す仮説の修正と評価値を再算出して仮説に付加し修正済仮説として出力する修正手段80、修正済仮説と同一内容の修正済仮説がある場合1つの修正済仮説を残して残りを破棄し、ない場合そのまま出力する修正仮説統合手段90、修正不要仮説と同一内容の修正済仮説がある場合はその修正済仮説を破棄し、残った修正済仮説と全ての修正不要仮説を仮説生成手段20に出力する仮説統合手段100を備える。
(もっと読む)
パルス波レーダー装置
【課題】車載用等のパルス波レーダー装置は、数十cmから数十mまでの広い範囲で対象物を検知する必要があることから、受信回路は大きな信号の受信パルス波から小さな信号の受信パルス波までダイナミックレンジの広い増幅回路が要求される。
【解決手段】本発明に係るパルス波レーダー装置は、近距離にある対象物を測定するとき、即ち、送信パルス波を送出直後は受信回路の増幅度が小さくなるように制御し、遠距離にある対象物を測定するとき、即ち、送信パルス波を送出して時間経過と共に受信回路の増幅度が大きくなるように制御する。
(もっと読む)
対象物検出システムの信号またはデータを評価する方法および装置
殊に自動車用の対象物検出システムを提案する。ここではレーダセンサによって、対象物から反射されたレーダ信号が、対象物の距離(d)および/または相対速度または接近速度(Cv)を求めるために処理される。最初の評価機会が距離信号(d)または接近速度信号(Cv)として生じるまでレーダセンサの少なくとも1つのチャネル(I,Q)のデジタル信号を処理し、距離信号(d)または接近速度信号(Cv)としての評価に対するモード切り換え(4)を行い、当該切り換えによって、どのデータが求められるのかが定められ、レーダセンサと後続接続された制御装置(7)との間のインターフェース(6)に供給される。  (もっと読む)
(もっと読む)
レーダ装置およびレーダ装置のアンテナ指向性調整方法
【課題】 機械的な軸ずれ調整を行うことなく、アンテナ指向性を調整することが可能なレーダ装置を得る。
【解決手段】 少なくとも1個のアンテナ(10)と、周波数変調された信号を生成しアンテナ(10)を介して送信する送信機(31)と、送信された信号の物体による反射波をアンテナ(10)を介して受信する受信機(33)と、送信された信号と受信された信号とに基づいて前記物体までの距離および物体の移動速度を演算する演算処理部(60)とを備えるレーダ装置において、送信機(31)の送信周波数を調整する周波数調整器(80)を設け、この周波数調整器(80)によって送信周波数を変更し、アンテナ指向性を調整する。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 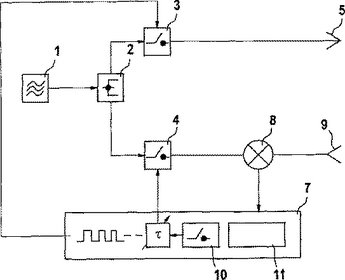 (もっと読む)
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
気象予測システム及び気象予測方法
【課題】 雨水量のレーダデータ同化を終了した後に予測計算を継続しても、モデル領域内での降雨状況を模擬し続けられるようにする。
【解決手段】 気象予測モデルに対して雨水量のレーダデータ同化を行って雨水量を算出した後(S21)、モデル領域内のある定義点の周囲に同化された雨水量が既定値以上存在する(水蒸気が豊富に存在する)かどうかの水蒸気量の推定計算を行い(S22)、周囲にレーダ同化された雨水が存在するか否かを判定する(S23)。この判定で、雨水が存在すると判定された場合には、水蒸気ボーガスを作成してモデル内にデータ同化する(S24)。これにより、モデル領域内でレーダデータ同化された雨水が直ちに落下しても、空中に漂う水蒸気をモデル領域に残すことができる。降雨地点は周囲も含めて擾乱が激しいので、その水蒸気が凝結して雲や雨を生成することが期待され、モデル領域内で「雨を降り続かせる」ことが可能になる。
(もっと読む)
移動物体検出装置
【課題】 自車両が走行している場合に、静止物体から反射された反射信号成分を抑制して、効率よく移動物体のみを検出する。
【解決手段】 レーダ装置1により自車両の周囲の移動物体を検出するに際して、信号処理部4は、FFT処理部32により周波数差信号の周波数スペクトルを算出すると共に、周波数オフセット量算出部33により、自車両速度に応じたドップラシフト量を算出する。そして、周波数オフセット部34は、送信周波数上昇期間の周波数スペクトルをドップラシフト量だけ正方向にオフセットさせると共に、送信周波数下降期間の周波数スペクトルをドップラシフト量だけ負方向にオフセットさせ、物標認識部35は、正方向にオフセットされた周波数スペクトルと、負方向にオフセットされた周波数スペクトルとを差分演算して得られる周波数スペクトルに基づいて、移動物体を検出する。
(もっと読む)
合成開口レーダ画像処理装置
【課題】 合成開口レーダ画像の分解能を劣化させることなくスペックル雑音を低減し、画質の向上を図る。
【解決手段】 シングルルック画像の段階で、飛行プラットホームの測定速度に対して、前処理部7にて異なる速度バイアス(時間によって変化するバイアスを含む)を与えた複数の速度データより画像を複数生成し、これらを加算処理部8で加算することで、分解能の劣化を招くことなくスペックル雑音が低減された合成開口レーダ画像を生成し、またこれと従来技術と組み合わせることで効果的にスペックル雑音が低減された合成開口レーダ画像生成を実現する。
(もっと読む)
全国合成レーダ雨量情報提供システム
【課題】隣接するレーダ雨量計の観測結果と合成する場合、個々のレーダ雨量計における観測特性の差を補正しきれないため、互いの接合部に段差が現れてしまうといった問題があり、連続的なレーダ雨量を精度良く求めることができない。
【解決手段】レーダ雨量計の全国合成手段1と、災害履歴検索手段2と、全国合成手段1より得られた精度の高い実況のオンライン合成レーダ雨量を用いる流出予測手段3と、レーダ雨量計補正手段4とを備える。全国合成手段1は、オンラインデータ、記録データを用いて、個別のレーダ雨量計が観測した雨量と地上雨量とを基に1kmメッシュ単位で、日本全土の連続的な雨量として定量的精度を高めた雨量値を算出し、雨量分布画像を作成表示する。全国26基のレーダ雨量計の観測値を収集し、時々刻々、地上雨量を用いた定量的補正と連続的な合成を行い、全国の3次メッシュ毎の合成レーダ雨量を作成する。
(もっと読む)
321 - 340 / 350
[ Back to top ]