
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
221 - 240 / 350
レーダ装置

【課題】送信切替型DBF方式のレーダにおいて、ビーム合成処理に高速フーリエ変換を用いるようにし、演算量を低減する。
【解決手段】レーダ装置は、受信素子で受信した同一の送信素子から放射された波動から得られた受信信号を抽出し、且つ抽出した受信信号の信号列にフーリエ変換を施すことにより、空間周波数領域の信号を生成するフーリエ変換部と、フーリエ変換部で生成された空間周波数領域の信号を、予め設定した基準位置と用いた送信素子の位置との差により生じる位相差で補償する位相補償部と、複数の送信素子を用いて得られた位相補償処理後の空間周波数領域の信号を、空間周波数毎に加算するコヒーレント積分部と、を備える。
(もっと読む)
高分解能レーダ装置

【課題】 航空機や衛星などの移動プラットフォームに搭載され、地表や海面の高分解能画像を得る高分解能の合成開口レーダ装置において、画像のボケを補償して分解能を改善する従来のオートフォーカス法では推定できなかった画像のレンジ毎に異なる位相誤差を推定することを可能とした高分解能の合成開口レーダ装置を提供する。
【解決手段】 画像を画像分割部4でレンジ方向に複数に分割し、分割した画像毎に位相誤差傾き推定部9で位相誤差を推定し、推定された位相誤差から位相誤差の傾きを推定し、レンジビン毎の位相誤差を求めることにより、レンジビン毎に異なる位相誤差を推定して位相誤差補償部10で補償することにより、レンジ毎に異なる位相誤差を推定して補償し、分解能を改善する。
(もっと読む)
受信アレーアンテナの校正行列の算出方法、受信アレーアンテナの自己校正方法、受信アレーアンテナの校正行列算出装置、および自己校正装置
【課題】アレーアンテナにおけるアレー素子間の相互結合の影響を除去してアレー単体で自己校正する。
【解決手段】複数のアレー素子の端子電流を、アレー素子が単独で存在し動作したときに流れる真の受信電流と、相互結合に起因して流れる再放射電流とに区分して再放射電流が流れる端子対回路モデルを定め、端子対回路モデルのアレー素子の入力インピーダンスZinに再放射電流が流れることで生じる電圧と、他のアレー素子に流れる再放射電流によって誘起される受信開放電圧とを合わせた電圧を求め、求めた電圧とこのアレー素子に流れる再放射電流との間の電圧−電流関係を表す再放射インピーダンス行列を求め、求めた再放射インピーダンス行列と、アレー素子の負荷インピーダンスと、アレー素子の入力インピーダンスを用いて、L個のアレー素子からなるアレーアンテナの校正行列Cを算出する。
(もっと読む)
車載用レーダシステム
【課題】車両の速度が速かったり、旋回半径Rが小さい場合、車載用のレーダ装置のレーダ視野角が狭くなり、レーダ装置の追従性能が低下して障害物の補足が困難となる。
【解決手段】車載用のレーダ装置1と、AFS(適応型照明システム)の照明装置2とを備えた車載用レーダシステムにおいて、レーダ装置1に、照明装置2の照射方向であるスイブル角度に基づいて、レーダ装置1の走査範囲の偏向角度を制御する制御手段16を設け、例えばカーブ走行下でレーダの検出性能が低下することを軽減するようにした。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 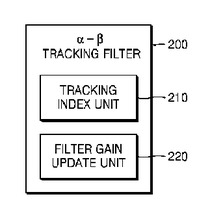 (もっと読む)
(もっと読む)
車載用周波数変調レーダ装置
【課題】観測時間の増加をともなうビート周波数の周波数分解能の向上を行うことなく、雑音の影響を抑制し、かつ雑音による誤推定を回避して精度よく高速にビート周波数が得られる車載用周波数変調レーダ装置を得る。
【解決手段】ピーク信号の周波数fnに周波数補正量δを加算して、補正後の周波数fn+δを算出する周波数補正手段S22と、補正後の周波数fn+δに基づいて目標物体までの距離または相対速度を演算するCPUとを備えている。FFT演算部において、窓関数の性質に基づいて真のピーク信号の周波数ftを算出し、算出結果に基づいて誤推定と判定される場合は真のピーク信号の周波数をさらに補正する。
(もっと読む)
位相同期発振器及びその制御方法
【課題】VCO回路の特性バラツキや温度変動によらず、簡単な構成及び制御で常に高安定なVCO出力が得られることを課題とする。
【解決手段】位相比較器と、ローパスフィルタと、主制御を行う制御部と、該制御部出力の制御電圧で駆動されるVCO回路と、その出力を分周する可変分周器とからなるPLLループを備える位相同期発振器であって、制御部は、PLLループを複数周波数でロックさせて各ロック時の制御電圧を測定し、該測定した各制御電圧に基づき、VCO回路のリニアリティー校正された変調感度を求めると共に、該PLLループを所定周波数でロックさせた後、該PLLループを開放した状態で、前記求めた変調感度に基づきVCO回路に所定周波数を中心とするリニアリティー補正された周波数変化を発生させるための制御電圧信号を生成する。
(もっと読む)
レーダ信号処理装置及びレーダ信号処理装置の調整支援方法
【課題】レーダ設置場所から見た移動目標の方位・距離のずれ調整作業を人手を少なくして迅速かつ適切に行えるようにし、これにより作業の精度向上と作業時間短縮を図ることを可能とするレーダ信号処理装置を提供する。
【解決手段】太陽ノイズ表示制御部106において、月日ごとの日の出時刻または日の入時刻を示す情報と、レーダ送受信装置の緯度経度情報及び磁針偏差情報とをもとに、太陽ノイズの方位情報を求め、比較処理部108にてこの太陽ノイズの方位情報を利用して、実際にレーダ送受信装置にて得られる受信処理結果から航空機の方位・距離のずれ量を求めるようにしている。また、レーダ送受信装置の探知領域内にある山や島といった固定目標の経度緯度情報を入力部112により指定入力するだけで、固定目標の経度緯度情報を利用して、レーダ送受信装置にて得られる受信処理結果から航空機の方位・距離のずれ量を比較処理部109で求めるようにしている。
(もっと読む)
目標位置確認システム及びレーダ信号処理装置
【課題】レーダ設置場所から見た移動目標の方位・距離のずれ調整作業を迅速かつ適切に行えるようにし、これにより作業の精度向上と作業時間短縮を図ることを可能とする目標位置確認システムを提供する。
【解決手段】滑走路RWY周辺に既知のGPS装置200を設置するだけでよく、またGPS装置200にPAR100への計測位置情報の送信機能を持たせることで、PAR100において自装置の経度緯度情報とGPS装置200の計測位置情報とを利用して、PAR100から見た航空機の方位・距離のずれを容易に調整できるようにしている。
(もっと読む)
軸調整装置
【課題】見栄えが悪くなることを防止することができる軸調整装置を提供すること。
【解決手段】車両の取付面にボルト30b〜30cを介して取り付けられたレーダー装置10のレーダー軸をドライバー50によってボルト30b〜30cを操作することにより調整する軸調整装置であって、表面が塗装された金属からなり、ドライバー50が挿入される挿入孔21b(21c)を有し、その挿入孔21b(21c)に挿入されたドライバー50をボルト30b〜30cが操作可能な位置に導くガイド部材20b〜20cと、表面が塗装されていない部材からなり、挿入孔21b(21c)に対応するドライバー50が挿入される挿入孔63を有し、少なくともガイド部材20b〜20cの挿入孔21b(21c)の周囲を覆う保護カバー60とを備えるものである。
(もっと読む)
車載レーダ装置
【課題】簡易な構成でありながら車両探知時に適切な補正を行って早期かつ確実に前方車両の探知を行うことができる車載レーダ装置を提供することを課題とする。
【解決手段】車載レーダ装置2には、ライト制御ECU3、ACC装置4、電動パワーステアリングECU(EPS)5、ナビゲーションシステム6が電気的に接続されている。ライト制御ECU3は、ヘッドライトのON/OFFに関するライトスイッチ情報を取得する。また、ヘッドライトやテールライトの点灯、消灯を行ういわゆるオートライト機能に用いられる照度センサから自車両周囲の照度値を取得する。ライト制御ECU3は、さらに、サスペンションの荷重状態、伸縮度合いから自車両の傾き情報を得るべく縦方向指示情報を取得する。この縦方向指示情報は、車両の前後方向の傾斜を把握する際に利用される情報で、この情報を用いて測定情報の補正を行い、ターゲットの判断に用いる。
(もっと読む)
レーダ装置
【課題】絶対位相を求めることにより位相変化を補正する手段を備えたレーダ装置。
【解決手段】図1は、レーダ装置の受信チャンネル部を示すブロック図である。信号線路L1、L2、L5、L6から入力する信号は位相が同期している。信号線路L1より入力した周波数77GHzの信号を、信号線路L6より入力した周波数5MHzの信号を用いてオンオフ変調させる。その後信号線路L2より入力した周波数77GHzの信号とミキサ13で混合し、信号線路L5より入力した周波数5MHzの信号を用いて直交復調し、位相値を検出する。反射波の受信による受信信号の検出位相から、この位相値を引くことで位相値を補正している。
(もっと読む)
距離測定方法及び距離測定装置
【課題】間に障害物があっても距離測定を可能とする距離測定装置を提供する。
【解決手段】図示した状態で、第1の送受信機1100から第2の送受信機2000へ、周波数f1/Nの矩形波DTで変調された周波数f1の搬送波を送信する。第2の送受信機2000は、受信波から周波数f1の搬送波を再生し、矩形波を復調する。この後周波数f1の搬送波から周波数f2の搬送波を生成して、復調した矩形波で周波数f2の搬送波を変調し、第2の送受信機2000から第1の送受信機1100へ逆送信する。第1の送受信機1100はここから周波数f1/Nの矩形波DRを復調し、矩形波DTとの位相差を検出する。位相差は、第1の送受信機1100から第2の送受信機2000までの距離の2倍を電波が通過した時間差である。内部回路での時間差(位相差)の補正のために、第2の送受信機2000と同一特性の第3の送受信機3000を用意しておく。
(もっと読む)
レーダ装置
【課題】AD変換におけるサンプリングの粗さが原因で発生する距離誤差が、検出対象物の位置で変動しないようにすることができるレーダ装置を提供する。
【解決手段】受光信号における実際のピーク中心の発生時間がAD変換部87のサンプリングから外れることによって発生する、ピーク中心推定時間の推定誤差を補正する誤差補正部89を備え、距離算出部90では誤差補正部89によって補正された補正後ピーク中心推定時間から反射物までの距離を算出する。
(もっと読む)
レーダ装置
【課題】ハードウェアや処理量が少なく、予め運動を想定することが困難な高機動目標に対する目標検出性能の改善を行うことのできるレーダ装置を提供する。
【解決手段】レーダ装置は、受信ビデオ信号をパルス圧縮し、パルス圧縮により生成された信号から目標までの距離を算出し、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出し、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を目標との相対速度または目標との相対距離を用いて算出し、位相補償量を用いて受信ビデオ信号の位相を補償し、位相補償された受信ビデオ信号をパルス圧縮する。
(もっと読む)
送受信システム,無線型伝送装置,および送受信方法
【課題】無線型伝送装置の存在位置を検知する。
【解決手段】外部発信受信装置10において、搬送波が振幅変調される(送信信号が送信される)。無線型伝送装置では、距離情報を含む返信信号が順次生成される。また、返信信号に含まれる距離情報に応じて、無線型伝送装置20における変調度が順次設定される。さらに、返信信号の各々に基づいて外部発信受信装置10からの搬送波が負荷変調される。これにより、振幅レベルが互いに異なる複数の返信信号が順次送信される。返信信号の距離情報が示す予測距離は、外部発信受信装置10からの搬送波の送信レベルおよび外部発信受信装置10における返信信号の受信状態の各々が所定条件を満たしているときの通信距離に相当する。外部発信受信装置10は、返信信号の受信状態が所定条件を満たしていると、返信信号の距離情報が示す予測距離を通信距離として取得する。
(もっと読む)
船舶用レーダ
【課題】搭載される船舶の動揺に応じて変化するレーダアンテナの姿勢変化に起因するアンテナ方位角の誤差による問題を解消して、小型船舶に搭載する場合でも物標の探知精度および追尾精度を確保する。
【解決手段】姿勢角センサ2は船体のローリング角およびピッチング角をそれぞれ検出し、方位誤差補正部6は船体の進行方向である船首尾方向に平行で且つ正横方向に平行な船体基準面内でのビームの指向方向であるアンテナ方位角と姿勢角(ローリング角,ピッチング角)とに基づいて、アンテナの方位角を水平面に投影した角度を補正アンテナ方位角として求める。レーダ映像データ生成部7および物標追尾部8では、この補正後のアンテナ方位角を用いて処理を行う。
(もっと読む)
物体識別装置および物体識別方法
【課題】物体から放射される電磁波の電波領域での放射強度に基づいて物体を検出して識別する物体識別装置において、環境変化や経時劣化により受信素子の感度特性が変化した場合でも精度高く物体識別を行うことが可能な物体識別装置を提供する。
【解決手段】物体から放射される電磁波の電波領域での放射強度を検出する複数の受信素子130と、受信素子130の出力信号に基づき放射強度画像を生成する放射強度画像生成部150と、放射強度画像に基づき検出した物体の位置と形状および放射強度とに基づき物体の識別を行う物体識別部200と、受信素子130に対し電波領域において電磁波を放射する放射部160と、受信素子130の出力信号が所定値以下である場合に放射部160から電磁波を放射し、受信素子130の出力信号に基づき受信素子130の感度特性が均一であるように出力信号の補正を行う出力補正部140とを備える。
(もっと読む)
画像レーダ装置
【課題】雑音や他の反射点の影響を低減しながら、位相やレンジの補償誤差を低減することができる。
【解決手段】移動する目標に対して電波を送信し、前記目標からの反射波を受信して、レンジプロフィールの時間履歴であるレンジヒストリを生成し、前記レンジヒストリのクロスレンジ圧縮により前記目標の画像を得る画像レーダ装置であって、レンジヒストリのドップラ周波数の時間変化の原因となる位相変化を推定して補償するための位相補償量を推定するための参照データ列を切り出しする低干渉参照データ抽出手段8を備え、低干渉参照データ抽出手段8は、参照データ列を切り出しする際に、レンジヒストリをレンジ方向に補間して、補間後のデータから最適な参照データ列を抽出するレンジ補間手段を有している。
(もっと読む)
画像レーダ装置
【課題】画像レーダ装置において誤差の少ない高さの分布図を得る。
【解決手段】観測対象領域の地形情報を予め格納する地形データ格納手段と、地形情報に基づいて観測対象領域の傾斜を算出する傾斜算出手段と、傾斜算出手段で算出された傾斜を持つ平面上の散乱点に対応する平面位相を算出する平面位相算出手段と、位相差算出手段で算出された2枚のレーダ画像の位相差から平面位相算出手段で算出された平面位相を減ずる位相補償手段と、位相補償された位相差の折り返しを開いて繋ぎ合わせる位相アンラップ手段と、繋ぎ合わせた位相差を地形の高さに換算して観測対象領域の高さの分布図を得る位相・高さ変換手段と、算出された高さの分布図に、傾斜算出手段で算出された観測対象領域の傾斜を加える高さ補正手段を備える。
(もっと読む)
221 - 240 / 350
[ Back to top ]