
Fターム[5J070AK04]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 検出値の補正 (378)
Fターム[5J070AK04]の下位に属するFターム
温度補正 (28)
Fターム[5J070AK04]に分類される特許
241 - 260 / 350
レーダ装置
【課題】距離やドップラー速度に折返しが発生しても、気象クラッタを十分に抑圧して、正確に目標を検出することができるようにする。
【解決手段】ドップラー速度算出部11により算出されたドップラー速度の中で不連続に変化する点があれば、不連続に変化する点でドップラー速度の折返し補正を実施する速度折返し補正処理部12と、ドップラー速度を空間方向に平滑化するドップラー速度空間平滑処理部14とを設け、フィルタ設定部15が平滑化されたドップラー速度の信号成分を抑圧する帯域制限フィルタを設定し、クラッタ抑圧フィルタ処理部16が当該帯域制限フィルタを用いて、受信信号に含まれている不要信号成分を抑圧する。
(もっと読む)
レーダ装置

【課題】ビームを高速に走査する場合にも角度精度の高い計測を実現する。
【解決手段】送信する波動を送信ビームにすると共に、観測対象とする反射物体からの反射波の到来方向を送信ビームの放射方向と一致させてビーム走査を行い、得られた反射波を受信ビームを用いて、配列した複数の受信素子のいずれかで受信し、ビーム走査速度と反射物体の仮定距離に基づいて送信ビームとその反射波の角度差を算出し、その角度差に応じて複数の受信素子の中から受信ビームを受信した受信素子のみを選択してその受信信号を得る。
(もっと読む)
目標物速度測定装置、目標物速度測定プログラム及び目標物速度測定方法
【課題】SAR(Synthetic Aperture Radar)画像に基づき、目標物の速度を高精度特定することを目的とする。
【解決手段】SAR搭載機の予測移動情報と目標物の移動情報とに基づいたSARと目標物との距離関係情報に基づき、SAR搭載機の速度を画像から推定する。また、SAR搭載機の速度を高次多項式で表現し、各次数の係数を画像から推定することで、より高精度なSAR搭載機の速度を得る。さらに、高精度なSAR搭載機の速度に基づくSAR搭載機の移動情報と目標物の予測移動情報とに基づいたSAR搭載機と目標物との距離関係情報に基づき、目標物の速度を画像から推定する。また、目標物の速度を高次多項式で表現し、各次数の係数を画像から推定することで、より高精度な目標物の速度を得る。
(もっと読む)
波形観測方法と波形観測装置
【課題】同期検波用遅延器を使用せずに測定対象からの反射波を観測することのできる波形観測装置を提供する。
【解決手段】進行波を所定の周期で繰り返し送出する送信器102と、測定対象Mで反射する反射波を受波する受信器103と、反射波の振幅値をその反射波を受波する毎に記憶していく反射波形観測手段104とを移動体に設けた波形観測装置であって、前記移動体と測定対象Mとの相対速度を検出する相対速度検出手段106と、測定対象Mと受信器103との間の伝播経路の経路変化量を、前記相対速度度に基づいて受信器103が反射波を受波する毎に算出する経路変化量算出手段107と、この経路変化量算出手段107が算出する経路変化量に基づいて、前記反射波のサンプリング点間隔を算出するサンプリング周期算出手段108とを備え、このサンプリング周期算出手段108が算出したサンプリング点間隔と、このサンプリング点間隔に対応する前記振幅値とから反射波の波形を観測する。
(もっと読む)
SAR搭載機速度測定装置、画像鮮明化装置、SAR搭載機速度測定プログラム、画像鮮明化プログラム及びSAR搭載機速度測定方法
【課題】SAR(Synthetic Aperture Radar)搭載機速度を高精度に知ることにより、高分解能画像を得ることを目的とする。
【解決手段】SAR搭載機の予測移動情報と目標物の移動情報とに基づいたSAR搭載機と目標物との距離関係情報に基づき、SAR搭載機の速度を画像から推定する。また、SAR搭載機の速度を高次多項式で表現し、各次数の係数を画像から推定することで、より高精度なSAR搭載機の速度を得る。高精度なSAR搭載機の速度に基づき画像を再生する。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、障害物(静止物体)が検知された時点で算出された、該障害物の進行路中心線からのずれ量に基づいて、該障害物の自車両に対する相対移動位置を推定する場合に、その相対移動位置を正確に推定できるようにする。
【解決手段】レーダ装置1により障害物が検知された時点で算出された上記ずれ量を、該障害物の自車両に対する相対移動位置を推定する際に、該障害物が検知されてから所定時間経過した時点で検出された旋回半径に基づいて補正する。
(もっと読む)
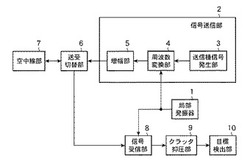
電波輻射制御装置
【課題】 逆探知される危険性があるため電波輻射禁止領域内でも、作戦遂行のため必要最小限の電波輻射については継続して行う。
【解決手段】 目標情報をリスト登録する目標情報データベースと、目標情報データベースから目標情報リストを取得する目標情報取得部と、目標情報取得部から送出される目標情報リストの目標種別から、自システムへの目標脅威度を判定し脅威度が所定基準以上の場合に目標情報リストを出力する脅威度判定部と、目標情報リストの観測時刻、目標速度から目標予測位置を算出する目標位置予測部と、電波輻射禁止範囲情報を電波輻射禁止範囲リストとして格納される電波輻射禁止範囲データベースと、電波輻射禁止範囲データベースから電波輻射禁止範囲リストを取得し、目標位置予測部から取得する目標予測目標位置と比較し、予測目標位置が電波輻射禁止範囲内の場合にこの禁止範囲を修正可能な電波輻射範囲制御部とを備えた。
(もっと読む)
地中探査装置
【課題】埋設物からの微弱な反射波の識別性に優れた地中探査装置を提供する。
【解決手段】地中探査装置100は、地表面を移動する台車10と、台車10に搭載され地中に探査用電磁波を放射する送信アンテナ11と、送信アンテナ11と異なる距離離間して台車10にそれぞれ搭載され埋設物からの反射波を受信する第1及び第2の受信アンテナ(12,13)と、両受信アンテナの受信信号をそれぞれ記憶するバッファメモリ21と、記憶された少なくとも一方の受信信号から埋設物の深度を算出する深度算出回路24と、両受信信号を比較し、台車10の移動方向距離と深度の両者に基づいて受信信号の埋設物同定を行う同定回路22と、同定された埋設物の両受信信号の台車移動方向偏差を深度値から補正する補正回路23と、補正された両受信信号を合成する合成表示回路25と、を備えている。
(もっと読む)
方位検出装置
【課題】 構成が簡易で少ない処理量にて位相折り返しに起因する誤検出を防止可能な方位検出装置を提供する。
【解決手段】 レーダ波を用いて検出された対象物標の距離,相対速度,方位に基づいて、CCDカメラ16で撮像される撮像画面上で対象物標が検出されるべき位置を算出し、その算出された位置に物標が存在するか否かを判断する(S210〜S230)。物標が存在しなければ、対象物標の方位の算出に用いた受信信号の位相差Δθに、位相の折返しがあったものとして改めて方位を算出し、この方位を用いて撮像画面上で対象物が検出されるべき予測位置を算出して、その予測位置に物標が存在すれば、その予測位置の算出に使用した方位を対象物標の方位とする方位補正を行う(S240〜S260)。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
レーダ画像処理装置
【課題】参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償できるレーダ画像処理装置を得る。
【解決手段】レーダ波の波長を格納する観測パラメータ格納部1と、レーダ観測により得られた受信信号を格納する受信データ格納部2と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部3と、前記プラットフォームの軌道情報から直線状の参照軌道として設定し、受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、合成開口中の各パルス送受信位置で、実軌道上のアンテナ位置と前記基準点の第1の距離、及び前記参照軌道上のアンテナ位置と前記基準点との第2の距離を、前記プラットフォームの移動を考慮しながら求め、第1及び第2の距離の差分である距離変化を算出し、前記波長と距離変化に基づき前記受信信号を補償する動揺補償部20とを設けた。
(もっと読む)
合成開口レーダ画像のオルソ補正装置及びオルソ補正方法
【課題】 従来、オルソ補正画像を等間隔の格子でブロック分割し、ブロック毎に、かつ複数の標高の基準面毎に、歪みのモデル式を求めていたため、各格子点で、オルソ補正画像とSAR画像の対応関係を複数の基準面毎に算出する必要があった。又、SARでは、衛星方向に向いた斜面は明るく、逆方向の斜面は暗く撮像される。オルソ補正画像ではこの縮まった明領域は引き伸ばされ、暗領域は縮められるため、SAR画像とオルソ補正画像を比較すると、画像全体の輝度値が保存されなかった。
【解決手段】 オルソ補正画像を等間隔の格子でブロックに分割し、ブロックの各格子点において、オルソ補正画像とSAR画像の対応関係の算出を1回に減らすことにより、処理時間の短縮を実現するとともに、輝度の補正を行い、画像全体の輝度値を保存する様にした。
(もっと読む)
測位装置
【課題】 センサの配置やセンサ自体の移動などに対応してセンサ間の同期をとるためのケーブル接続を不要とし、また、時計誤差を補正するための送信局を不要とするために、測位装置内の処理でセンサ間の時計誤差の補正を可能にする。
【解決手段】 目標から放射もしくは反射された電波を複数のセンサで受信し、受信した電波の到来時間差に基づいて目標の位置を算出する測位装置において、各センサで複数回受信された電波の到来時間差を算出する到来時間差算出部と、各センサ間の電波の到来時間差を基に、センサ間の時計誤差と電波を受信した各時刻における目標位置を測位する測位部を備える。
(もっと読む)
距離計測装置・撮像装置、距離計測方法・撮像方法、距離計測プログラム・撮像プログラムおよび記憶媒体
【課題】精度の高い距離情報を取得すること。
【解決手段】本発明にかかる距離計測装置1は、撮像部10から出力された画像信号群に基づいて撮像視野内に位置する物体までの距離を演算する演算部24と、所定の検出範囲内に位置する物体までの距離を検出するレーダ60と、レーダ60における検出値に基づいて演算部24における演算値が正常または異常であるかを判定する判定部22と、判定部22が異常であると判定した演算値を修正する修正部23と、を備える。本発明にかかる距離計測装置1によれば、判定部22が異常であると判定した演算値を修正した距離データを出力するため、精度の高い距離情報を取得することができる。
(もっと読む)
パルスレーダ装置及び測距方法
【課題】 ターゲットからの反射信号である一次エコーだけを出力する帯域合成処理を用いたパルスレーダ装置を得る。
【解決手段】 送信信号に2PRI周期で0度/180度の位相変調を施して送信する。ターゲットからの反射信号を送信信号と同一符号で復調することで、一次エコーは送信の位相変調が消えるのに対し、二次エコーはPRI毎に0度/180度の位相変調が加えられる。受信信号を合成帯域処理することで全セル数の半分に相当する距離だけ移動することを利用して、二次エコーの識別を行う。一次エコーと二次エコーのドップラ周波数の差分によって一次エコーが同様に移動してしまうことがあるため、処理フレーム毎に変調を施すフレームと変調を施さないフレームを交互に送信することで、ドップラ周波数によらず2フレームに1回は必ず一次エコーと二次エコーの分離を可能とした。
(もっと読む)
車載用レーダ装置
【課題】ターゲットの有無によらず距離計測誤差を検出し、補正を行うことができる信頼性の高い車載用レーダ装置を提供することにある。
【解決手段】信号処理部11に、距離算出部21と、反射地面距離算出部22と、幾何学的距離算出部23と、距離誤差算出部24と、距離補正および報知部25とを備える。反射地面距離算出部22において、受信電波のうち地面から反射した成分のみを抽出し、処理することで、車載用レーダ装置1から地面までの距離を算出する。幾何学的地面距離算出部23において、送信電波が地面に接するまでの最短距離を算出する。距離誤差算出部24において、車載用レーダ装置1から地面までの距離と、送信電波が地面に接するまでの最短距離とを比較することで距離誤差を算出する。距離補正および報知部25において、距離誤差に応じて、距離算出部21が算出した距離を補正する。
(もっと読む)
電子走査式レーダ装置
【課題】時分割受信型電子走査型レーダにおいても、方向性を利用した干渉抑圧が可能な、電子走査式レーダ装置の提供
【解決手段】サンプリングされたビート信号RDを、各アンテナ素子について時間方向に複数の短時間データSDに切り出す。短時間データSDの周波数スペクトルから、干渉波の干渉成分周波数を検出する。干渉波の干渉成分周波数から、干渉波の折り返し前周波数の候補(fBB)を複数生成し、各候補について位相補正を行う。補正後の周波数に対してデジタルビームフォーミング処理を行って、方位方向の電力の最大ピーク(図10のP1,P2,P3,P4)をそれぞれ抽出し、最大のピーク電力(図10のP2など)を示す周波数候補を選択して、干渉成分の到来方位を推定する。推定された干渉成分の到来方位から、当該干渉成分を抑圧するフィルタを作用させ、干渉成分を抑圧する。
(もっと読む)
パルスレーダ装置
【課題】 ストレッチ処理パルス圧縮による測距とビームフォーミングによる測角を行うレーダ装置において、送信信号帯域が大きくても、目標までの相対距離が大きい場合の測角精度の劣化が抑えるレーダ装置を得る。
【解決手段】 チャープ周波数変調され、目標に反射されたパルスの受信信号13を、局部発振信号16を用いて位相検波し、複素ビート信号を出力する受信器21と、複素ビート信号を時間方向にフーリエ変換し、目標までの相対距離情報を含む複数の高分解能レンジビン26bを出力するストレッチ処理パルス圧縮器25と、複数の高分解能レンジビンを空間方向にフーリエ変換することによってビーム形成し、形成したビームと前記複数の受信素子アンテナの配置とに基づいて目標の方向を求めるビーム形成器17とを備えた。
(もっと読む)
レーダ装置とその信号処理方法
【課題】観測対象の速度分布のばらつきが大きい場合でも、高い精度で観測対象の速度を算出する。
【解決手段】繰り返しレーダパルスを送信しレーダエコーを受信しつつレーダ覆域をスキャンするレーダ装置であって、複数のスキャンごとに速度スペクトルを位相差ベクトルに変換する。そして、複数のスキャンの1つを基準スキャンにして、複数のスキャンの位相差ベクトルを、基準のスキャンに相当する位相差ベクトルにそれぞれ補正する(ステップS2a〜S2c)。さらに、補正された位相差ベクトルを含む複数のスキャンの位相差ベクトルを連続するようにし(ステップS2d,S2e)、この連続する複数のスキャンの位相差ベクトルをもとに前記ターゲット領域の速度を算出する(ステップS2f)。これにより、観測対象の速度分布のばらつきが大きい場合でも、多くのデータを用いて、高い精度で観測対象のドップラ速度を算出できるようになる。
(もっと読む)
測距システム
【課題】 パルス列を構成する各パルス信号の到達時間から距離を算出する測距システムにおいて、より誤差を軽減させた高精度の距離測定を実現する。
【解決手段】
受信したパルス列を構成するパルス信号数をカウントすることにより、パルス信号を生成する発振器につき、発信装置2と返信装置3との間で相対的な時間差を求め、さらに発信装置2から返信装置3までの距離を算出するとともに、算出された相対的な時間差に基づいて上記算出した距離を補正する。
(もっと読む)
241 - 260 / 350
[ Back to top ]