
Fターム[5J070AK15]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 複数物標の識別 (246)
Fターム[5J070AK15]に分類される特許
121 - 140 / 246
物体検出装置および物体検出方法
【課題】 検出点の変化に伴う相対速度の誤算出を防止でき、物体の検出精度を高めることができる物体検出装置を提供する。
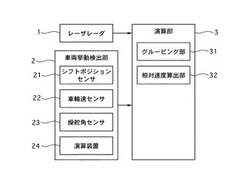
【解決手段】 レーザレーダ1と、生成された複数の検出点のうち、同一物体であると推定される検出点をグループ化するグルーピング部31と、同一グループに含まれる各検出点と自車の距離を平均化し、当該平均距離の時間的差分に基づいて検出物体の自車に対する相対速度を算出する相対速度算出部32と、を備えた物体検出装置において、相対速度算出部32は、同一グループに含まれる検出点の個数が変化した場合、検出点の個数が変化する直前に算出した相対速度を維持する。
(もっと読む)
所在管理システム

【課題】複数の各空間に所在管理リーダが配置され、使用者が所持する無線アクティブタグが前記リーダに一定の時間間隔でユニークな自IDを発報することで、前記各空間における該タグの移動の推移や現在位置を前記リーダ側に管理させる所在管理システムにおいて、消費電力を削減し、タグの内蔵電池の長寿命化を図る。
【解決手段】前記複数の空間に区分されたオフィスから成る第1の空間領域と、廊下から成る第2の空間領域との往来部(ドア)に、前記タグへ質問信号を送信し、応答信号が受信されることでタグの通過を検出する入退室管理リーダを設置するとともに、前記所在管理リーダは、前記自IDが受信されるとそれに対するACK信号を送信するようにし、前記タグは、前記応答信号を送信してから、前記自IDの発報に対するACK信号が受信される間は前記自IDの発報を継続し、前記ACK信号が受信されないと発報を休止する。
(もっと読む)
レーダ装置、その制御方法及び車両
【課題】搬送波の伝播経路にスイッチング素子を設けることなく、探知距離及び探知方位を切り替えられるレーダ装置を提供する。
【解決手段】本発明に係るレーダ装置200は、搬送波221を発生する発振器201と、搬送波221を、擬似ランダム符号M1を用いて拡散する送信回路204Aと、搬送波221を、擬似ランダム符号M2を用いて拡散する送信回路204Bと、送信回路204Aにより拡散された被拡散波224Aを送出する送信アンテナ205と、送信回路204Bにより拡散された被拡散波224Bを、送信アンテナ205と異なる指向特性で送出する送信アンテナ206と、送信アンテナ205及び206により送出され対象物に反射された反射波229を受信する受信アンテナ209と、反射波229を、擬似ランダム符号M1を用いて逆拡散し、かつ反射波229を、擬似ランダム符号M2を用いて逆拡散する受信回路210とを備える。
(もっと読む)
タググループの設定方法及び移動体位置監視システム
【課題】 グループIDコードの設定が不要で、グループからの離脱が確実に検出でき、しかも離脱したタグの位置をユーザーが知ることができるタググループの設定方法を提供する。
【解決手段】 マスタタグは記憶領域として少なくとも、書き換え不能な複数ビットのIDコードを記憶する固定領域と、書き換え可能な複数ビットを有する可変領域を有し、スレーブタグは少なくとも書き換え不能で、且つマスタタグと同一ビットのIDコードを記憶する固定領域を有し、マスタタグの可変領域は、少なくともグループ情報領域を備え、当該グループ情報領域には、複数ビットのIDコードの内、グループIDコードとして使用する領域を指定する情報を設定し、タググループは、各タグ自身のIDコードの内、グループ情報領域でグループIDコード領域と指定されたIDコードの部分が同一のタグとする。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】レーダ装置はできるだけ多くの信号を、できるだけ短時間での処理が要求され、信号の要求精度を落とさずに高精度の高分解能処理の削減で負荷を削減する。
【解決手段】目標物からの反射波をアンテナで受信してA/D変換部でディジタル化し、時間フーリエ変換部でドップラー周波数次元に変換して目標物の相対速度を算出し、ドップラー周波数次元の信号に対しピーク検出部で受信レベルのピーク検出を行い距離ゲートまたは相対速度情報から信号の重要度を重要度判定部で判定して、データ並び替え部で重要度順に並び替え、この各信号と重要度を、異なる複数の高分解能処理方法における演算精度および所定数の信号の処理時間を処理方法との組合せ毎に格納されたデータベースと照合し、各信号と高分解能処理方法とをデータ割当て部で対応させ、高分解能処理部で角度または距離を算出する。
(もっと読む)
動態監視システム
【課題】 狭いスペースにおける移動体の位置把握を細かく分けて認識することが難しく、セキュリティ面での不安もあり、狭い空間範囲においても人などの移動体が、いつ、どの方向に移動したかといった位置把握を可能とする。
【解決手段】 移動体が通過するゲート11の通過方向に第1赤外線センサ12並びに第2赤外線センサ13を設置し、第1並びに第2センサは、移動体がゲートを通過するに伴って第1センサのみが作動し、その後第1並びに第2センサの両方が作動し、その後第2センサのみが作動するようにゲートの位置に設置され、移動体が携行するRFIDタグ15からのID信号並びに第1・第2センサからの出力信号に基づいて移動体の動態を監視する。
(もっと読む)
到来波数推定方法、レーダ装置
【課題】スナップショット数が少ない場合でも、高精度で到来波数を推定可能な到来波数推定方法、及びその方法を利用したレーダ装置を提供する。
【解決手段】レーダ波を反射した物体からの到来波を受信する複数のチャネル間の相関を表した相関行列の固有値の中で最大のものを基準固有値λ1 として、この基準固有値λ1 に対する各固有値λ2 〜λN の比Rλi(=10log10(λi /λ1 ))を求め(S310)、基準固有値λ1、及び固有値λ2 〜λN の中で固有値比Rλiがノイズ閾値THより大きいものを信号空間の固有値、ノイズ閾値TH以下のものを雑音空間の固有値に識別し、信号空間に識別された固有値の数を到来波数Lとしてカウントする(S320〜S360)。
(もっと読む)
二次監視レーダ装置及び制御方法
【課題】モノパルス測角処理において、ガーブル発生時に、測角誤差を小さくして、複数の目標の検出精度を向上し得る二次監視レーダ装置を提供する。
【解決手段】ガーブル検出部16において、波形生成部13で得られる和信号Σ及び差信号Δそれぞれの振幅の変化を利用して、オフポアサイト角計算部17によるオフポアサイト角演算処理に先立ち、複数のターゲットからの応答が重なるガーブル期間を検出し、計算制御部171にて当該検出結果に基づいてガーブル期間を除いた和信号Σ及び差信号Δを抽出して、オフポアサイト角計算部17にて和信号Σ及び差信号Δからガーブル期間以外のオフポアサイト角を求めるようにしている。
(もっと読む)
物品移動管理システム及び物品移動管理方法
【課題】物品の移動方向を検知する、検知精度の高い物品移動管理システム及び物品移動管理方法を提供する。
【解決手段】物品移動管理システム及び物品移動管理方法は、微妙な調整技術等を必要とせずに、物品40の移動方向に対して所定の間隔を置いて直列に少なくとも2箇所に配置されたアンテナ11、12、13、14による、所定の検知時間における、物品40に付されたRFIDタグ41の読取り回数を比較することにより、物品40の移動方向を検知する。
(もっと読む)
事業所内空間座標位置判定システム(SiteCubicPositioningSystem(SCPS))
【課題】個々の物品の探索や名称の確認、棚卸の実行に多大の人員と時間と費用を要しない物品管理方法を提供する。
【解決手段】RFID(Radio Frequency Identification)ICタグに、任意の物品の移動履歴情報を持たせる。移動履歴の情報とは緯度、経度、高度、時間である。RFID(Radio Frequency Identification)は誘導電磁界あるいは電波によって、非接触で半導体メモリのデータを読出し、書き込むために近距離通信を行う。このICタグは回収後再利用が可能であるが、部品に組み込んだままとすることで装置に組み込まれた部品の保守管理にも使用出来る。
(もっと読む)
ID発信装置設置位置情報の登録システム、装置、方法およびプログラム
【課題】ID発信装置と管理システムの間にネットワークを有しないシステムにおいても、設置位置情報の登録を支援可能とするID発信装置設置位置管理システムを提供する。
【解決手段】実際に作業者がID発信装置100の設置時やID発信装置100の動作確認の際に、ID発信装置100から送信されるID情報を受信可能で、かつ、登録操作を行うことが可能な作業者端末200を用いることにより、その場で設置位置情報の登録を可能とする。
(もっと読む)
個体管理装置及びプログラム
【課題】複数の個体の位置情報を正確に管理することが可能な個体管理装置を提供する。
【解決手段】複数の個体それぞれが保有する位置検出器(無線ICタグ52)を用いて検出される位置情報に応じた第1の行動履歴を保持する第1の保持手段(行動ログ収集サーバ50)と、第1の行動履歴とは異なる種類の、各個体に関する第2の行動履歴を保持する第2の保持手段(出退勤管理サーバ18)と、第1の行動履歴と第2の行動履歴とに基づいて、各個体と各個体が保有する位置検出器(無線ICタグ52)との関係を評価する評価手段(行動ログ収集サーバ50)と、を備える。
(もっと読む)
レーダ信号処理装置及びレーダ信号処理方法
【課題】単一または複数のレーダにより検出された複数の測定点の測定情報に基づいて、測定点を正確に求め、且つ、処理時間を要することなくグループ化することのできるレーダ信号処理装置及びレーダ信号処理方法を提供する。
【解決手段】単一または複数のレーダにより検出された複数の測定点の各相対速度ベクトルに基づいて各測定点を含む仮想物体の合成相対速度ベクトルを算出する速度ベクトル演算部31と、算出された複数の仮想物体の合成相対速度ベクトルが等しい仮想物体を実物体としてグループ化するグループ化処理部32と、グループ化された実物体の合成相対速度ベクトルを平均処理した平均相対速度ベクトルを算出する平均相対速度ベクトル演算部33と、算出された平均相対速度ベクトルに基づいて各測定点の距離を補正する距離補正部34を備えて構成される。
(もっと読む)
ロケット追尾レーダ装置
【課題】ロケットから分離した小物体や爆破によるロケットの破片を探知、追尾し、落下範囲を予測可能にする。
【解決手段】分離・爆破判定部がロケットの分離、爆破の状態を表す信号を基に分離、爆破を判定し、閾値制御部が破片データベースの対象の破片情報に基づいて推測したサイズの破片を目標として検出するように目標検出部の検出閾値を変更し、追尾制御部が対象の破片情報に基づいて破片のまとまりを目標として一つの追尾ビームにより追尾できるように追尾部の追尾フィルタの変更し、追尾部は対象の破片情報に基づいて追尾フィルタを変更して追尾処理を行うと共に、破片のまとまりに対する追尾ビームを形成するよう送受信装置を制御し、落下範囲予測部は破片のまとまりに対応した追尾結果データおよび対象の破片情報に基づいて破片の予測落下範囲を算出する。
(もっと読む)
物体位置特定システム、物体位置特定方法、物体位置算出装置、及びコンピュータプログラム
【課題】複数の物体が混在する室内環境であっても、対象となる物体の位置を精度良く特定することができる物体位置特定システム、物体位置特定方法、物体位置算出装置、及びコンピュータプログラムを提供する。
【解決手段】センサが移動状態である旨を検知した時刻情報及び識別情報を外部へ送信することが可能な電子タグ、人間の存在する位置に関する位置情報を外部へ送信することが可能な人間位置特定手段、及び電子タグを装着した物体の位置を算出する物体位置算出装置を備える。物体位置算出装置は、人間の位置変化の加速度を算出し、算出した加速度の変化に応じて人間が移動している時間帯を推定する。センサが移動状態と検知した時間帯に人間が移動している時間帯が含まれる場合、移動状態と検知した時間帯の最終の時刻での人間の位置情報を、電子タグを装着した物体の位置情報として記憶する。
(もっと読む)
多目標追尾装置
【課題】センサから得られる属性情報を利用しつつ、その属性の急変が起きた場合でも正しい相関決定を行うことができる多目標追尾装置を得る。
【解決手段】入力された最新観測時刻における観測値と各航跡のゲート内外判定を属性に関して行う属性相関決定部1と、各航跡の位置情報に関するゲートを算出し、入力された観測値の位置情報が前記ゲート内にあるかどうかを調べ、入力された観測値がどの航跡と相関可能であるかを決定する位置情報相関決定部2と、観測値と航跡の属性、位置情報に関する相関結果を元に、最新観測時刻の目標の運動諸元を推定する航跡を生成する統合航跡生成部3と、生成された航跡を組合せて仮説を生成し、属性の急激な変動が起きる確率である属性変動確率パラメータを用いて各仮説の信頼度を計算する統合相関仮説生成部4と、計算された信頼度の低い仮説の削除し、似た仮説の統合によって仮説群を縮小する仮説選択統合部5とを設けた。
(もっと読む)
レーダ装置
【課題】MTI処理による追尾目標の探知においてブラインド速度領域にある探知困難な移動目標が存在した場合にも、初探知を含め探知・追尾を容易に行えるようにする。
【解決手段】目標の探知を探索走査時にはビデオ積分処理系行い、また追尾走査時にはMTI処理系で行うようにし、処理系のビデオ信号にプロット生成処理、目標の予想位置、速度の算出を行い、目標情報作成・管理部により、速度が閾値を超えた目標を追尾の対象目標として抽出して目標情報を作成すると共に、ブラインド速度領域に入る速度を持つ対象目標を抽出し、追尾PRF算出部により当該対象目標の速度のドップラ周波数を算出し、当該ドップラ周波数の1/2程度の値を追尾ビームの送信PRFとして算出して励振受信部に与える。
(もっと読む)
タグ情報処理装置、タグ情報処理方法、およびプログラム
【課題】従来のタグ情報処理装置においては、RFIDタグの位置等の属性を、容易に検出できないという課題があった。
【解決手段】複数のRFIDタグ100が配置されている空間内において、読み取り対象とする空間を変更して複数回行われた、RFIDタグ100に記録されている情報の読み取り結果を受け付ける受付部13と、受付部13が受け付けた複数回の読み取り結果において、複数のRFIDタグ100内の1以上のタグである対象タグの少なくともいずれか一つと同時に情報が読み取られた、複数のRFIDタグ100内のタグに対して、同時に読み取られた回数に応じて、対象タグのそれぞれとの隣接関係を示す値である隣接度を設定する隣接度設定部14と、隣接度設定部14が設定した隣接度を出力する出力部16とを具備するようにした。
(もっと読む)
SSRモードSにおけるパーシャル検出航空機の監視方法及び装置
【課題】極力電波環境の悪化を避け、管制に必要なレベルまでパーシャル検出航空機の検出率を上げ、2つのレポート(モードA/CとモードSターゲットレポート)の出力を抑制又は防止する。
【解決手段】信号処理部4は通常はSSRモードSで運用し、パーシャル検出航空機がレーダの覆域又はセクタ等の所定アリアに存在することを自動検出した際、アラームを発出し、そのエリアに対しMIIPモード又はモードSモード等、パーシャル検出航空機からもモードA/C応答が得られるモノパルス形式の質問を含むモードで運用する。必要なエリア等においてのみ各航空機からモードA/C応答を得ることにより、パーシャル検出航空機の検出率を上げることができ、かつ、不要なモードA/C応答を最小限にすることができる。
(もっと読む)
測距システムおよびその測距方法
【課題】測定対象が特定されていない多数の被測定物までの測距を、正確に行うことが可能な測距システムおよびその測距方法を提供する。
【解決手段】被監視者が携帯する無線タグ20と、無線タグ20までの距離を測定する測距装置30とを測距システム10において、測距装置30は、無線タグ20に、応答要求通知をブロードキャストにより送信し、応答要求通知に対する返信通知を受信すると、返信通知を送信した無線タグ20のアドレスを指定して測距要求通知を送信し、測距要求通知を送信してから測距要求通知に対する測距応答通知を受信するまでの時間を計測することで、距離を算出する。無線タグ20は、応答要求通知を受信すると、無線タグ20ごとに設定された異なる時間が経過した後に、割り当てられたID情報をアドレスとして含めて返信通知を送信し、測距要求通知にて指定されたアドレスが、自アドレスであるときには、測距応答通知を送信する。
(もっと読む)
121 - 140 / 246
[ Back to top ]