
Fターム[5J070AK15]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 複数物標の識別 (246)
Fターム[5J070AK15]に分類される特許
101 - 120 / 246
フェーズドアレイアンテナ
【課題】DBF手法によってマルチビームを形成する方向を瞬時に切換え選択して出力するフェーズドアレイアンテナを得る。
【解決手段】仰角方向及び方位角方向の2次元にマトリクス状に配列されたアンテナ素子で受信した信号を2分配し、各列(縦方向、すなわち仰角方向)毎、及び各行(横方向、すなわち方位角方向)毎にRF電力合成を行なう。そして、各列毎、あるいは各行毎に合成された信号のどちらか一方を選択することによって2次元のアンテナ開口面においてRF電力合成する一方向を選択するとともに、選択した合成信号を用いてDBF手法によるビーム形成処理を行ない、もう一方の方向に対してマルチビームを形成する。そして、各列毎、あるいは各行毎に合成された信号の選択を切り換えることによって、その方向を電子的かつ瞬時に入れ替える。
(もっと読む)
車両用物体認識装置

【課題】車間距離制御に対する適応性を維持しつつ、道路を横断する歩行者等の所定物体を適切に監視すること。
【解決手段】電磁波を放射すると共に該放射した電磁波の反射波を受信する電磁波放射受信手段(14、20)と、該電磁波放射受信手段が受信した反射波のデータに基づいて物標との距離及び横位置を含むデータを算出する物標位置データ算出手段(27)と、該物標位置データ算出手段の算出結果に基づいて車両周辺の物体を認識する物体認識手段(30)と、を備える車両用物体認識装置(1)であって、前記物体認識手段は、前記電磁波放射受信手段における受信波強度に関する所定条件を満たす所定物体以外の物体については、第1の認識モードで障害物認識を行ない、前記所定物体については、前記第1の認識モードに比して物体接近時の横位置応答性が高い第2の認識モードで障害物認識を行なうことを特徴とする。
(もっと読む)
物体検出装置、物体検出方法および物体検出システム
【課題】歩行者のような弱反射物体であっても最初のレーダ探索で検出すること。
【解決手段】物体種別判定部が、車両に搭載されたカメラによって撮像された画像に基づいて物体の種別を判定し、閾値選択部が、判定された種別に対応付けられた所定の閾値を選択し、画像に対応する範囲について照射した照射波に係る反射波の強度が選択された閾値以上であることを条件として物体を検知するように、物体検出装置あるいは物体検出システムを構成する。
(もっと読む)
レーダシステム
【課題】監視目標に異常が発生した場合に、空港監視レーダ、二次監視レーダそれぞれで取得される目標情報の妥当性を容易に解析できるようにする。
【解決手段】レーダシステムにおいて、空港監視レーダ10では、デジタル変換直後のデジタル信号にタイムスタンプを付与し、タイムスタンプを付与したデジタル信号から検出情報Aを生成し、二次監視レーダ20では、デジタル変換直後のデジタル信号にタイムスタンプを付与し、タイムスタンプを付与したデジタル信号から検出情報Bを生成するものとし、表示装置40において、生成された検出情報A,Bに基づいて目標情報を表示し、この目標情報と同時にタイムスタンプを表示すると共に、表示される目標情報及びタイムスタンプを保存部50に保存する。このように保存されたタイムスタンプを参照することで、各レーダが受信した目標情報のうち、監視目標の目標情報のタイムスタンプと一致するタイムスタンプを付与された目標情報を検索することが可能となる。
(もっと読む)
車両の接触回避支援装置
【課題】障害物の周囲に道路構造物などの多くの物体が存在するときも、それらと区別して障害物を早期に認識して迅速に回避するようにした車両の接触回避支援装置を提供する。
【解決手段】自車の周囲に存在する物体からの反射波が連続してm回あるいは通算してn回受信したとき、その物体を検出する物体検出手段(レーダ装置)と、自車の運動状態を検出して自車の進路を予測すると共に、進路上に物体が存在するとき、障害物と認識して自車との接触の可能性を判定し、t回接触の可能性があると判定される場合、物体との接触回避を支援する接触回避支援動作を実行する接触可能性判定手段を備えた車両の接触回避支援装置において、障害物の認識が困難な環境か否か判定し(S100)、肯定されるとき、m,n,tを減少補正して物体検出手段と接触可能性判定手段の応答性を向上させる(S102)。
(もっと読む)
レーダ装置および目標検出方法
【課題】ビーム幅内に回転体の目標と非回転体の目標とが存在する場合であっても、これらを識別できるレーダ装置を提供する。
【解決手段】ΣビームをFFTする第1FFT部41と、このFFTによりフィルタバンク毎に分離された信号から所定のスレショルドレベルを超えた信号を検出するスレショルド検出部42と、ΔビームをFFTする第2FFT部43と、スレショルド検出部からの信号と第2FFT部からの信号とに基づき測角する測角部44と、測角により得られた測角値の幅に対応する周波数軸上のフィルタバンクを抽出する周波数幅分類部45と、抽出されたフィルタバンクの信号を、フィルタバンクの幅を変更しながら逆FFTするIFFT部46と、逆FFTにより得られた値が最大になるフィルタバンクの幅から目標のドップラ周波数幅を決定し、識別情報として出力する周波数幅抽出部47を備えている。
(もっと読む)
航跡割当装置
【課題】組合せ最適化問題を解くメタヒューリスティックス手法を用いて航跡割当問題の一つであるMFA問題の解を高速に求める航跡割当装置を提供する。
【解決手段】測定して蓄積された移動体の航跡に関する観測データに基づき、予め定められた制約条件に違反しない複数の航跡候補を割当パターン群として生成し、この生成された割当パターン群を構成する各割当パターンに対し、航跡の始点に基づくグループに分類し、各グループの各割当パターンに対して一意の番号を付与する航跡候補群生成手段3,4と、各割当パターンに付与された番号に基づき、組合せ最適化を図るメタヒューリスティックス手法によって観測値を航跡に割り当てる航跡割当処理を行う航跡割当処理手段5〜10とを有することを特徴とする航跡割当装置にある。
(もっと読む)
位置判定方法
【課題】GPSによる位置取得やタグリーダの位置等の、絶対的位置が特定できる参照データを用いることなく、物体の位置を特定すること。
【解決手段】物品検索装置100は、検索対象物が指定された場合に、検知記録データに基づいて、検索対象物が最後に検知された最終検知日時を判定し、最終検知日時および検知記録データに基づいて、最終検知日時と同じ日時に検知された物体のうち、検索対象となる物体の所有者とは異なる他人が所有する物体を判定し、判定した物体の所有者のスケジュール表を基にして、検索対象物の位置を判定する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】MUSIC法や最小ノルム法などの固有展開を用いて到来波方向検出を行う際、可変ステップを小さくし、かつ角度検出の演算量を低減することが可能な電子走査型ミリ波レーダ装置及び受信波方向推定プログラムを提供する。
【解決手段】本発明の電子走査型レーダ装置は、移動体に搭載されるレーダ装置であり、送信波を送信する送信部と、送信波のターゲットからの反射波である到来波を受信する複数のアンテナから構成される受信部と、送信波及び反射波の差分の周波数を有するビート信号を生成するビート信号生成部と、時系列にビート信号を予め設定した分解数のビート周波数に周波数分解して複素数データを算出する周波数分解処理部と、複素数データからターゲットの存在する角度範囲を算出する角度範囲設定部と、角度範囲内における角度スペクトラムを算出する方位検出部とを有することを特徴とする。
(もっと読む)
RFIDタグ検出の方法及びシステム
【課題】検出範囲外に存在するはずのRFIDタグがタグ要求やタグ応答のマルチパス効果によって誤検出されてしまうのを防止する。
【解決手段】複数回送出されたタグ要求206,208に対するRFIDタグ202からの応答212,214の回数と前記タグ要求の回数を比較することにより、前記RFIDタグが所定のエリア内に位置するか否かを判断する。
(もっと読む)
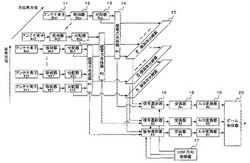
受信機ネットワークを用いた複数の物体の位置特定
送信機によって放出され、物体によって複数の受信機に反射される信号を処理することによって複数の物体の正しいロケーションを求めるための技法を説明する。角度情報も高度情報も使用されない。物体−受信機対の到達時間差測定値を作成して、各物体から各受信機−受信機対において受信された信号間の到達時間差を計算する。次に、双曲線の位置特定を実施して、物体毎の可能なロケーションを識別する。受信機−物体対毎に直接・反射信号受信時間測定値を作成して、送信機からの直接信号の受信機による受信と、物体によって反射された信号の受信機による受信との時間差を計算する。直接・反射信号受信時間測定値は、物体−受信機対の到達時間差測定値に関連付けられ、その結果を使用して、双曲線の位置特定によって求められたロケーションを直接・反射信号受信時間測定値に関連付けることによって、正しい物体位置を識別する。 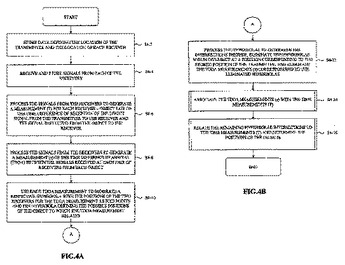 (もっと読む)
(もっと読む)
二次監視レーダ装置
【課題】従来の監視方法では監視が困難であったモードS機の応答状態を把握しやすくする。
【解決手段】オールコール期間とロールコール期間とを設定して、航空機を捕捉するモードS二次監視レーダ1であって、オールコール期間にロールコール質問を送信する送信手段122と、ロールコール質問に対応したロールコール応答を受信する受信手段123と、予めオールコール期間に設定されたタイミングで受信したロールコール応答を解読する解読手段132とを備える。
(もっと読む)
測角装置
【課題】高精度に測角できる測角装置。
【解決手段】サブアレイ信号に基づき位相モノパルスビーム(Σ、Δ)を形成するモノパルスビーム再形成部41と、ΣビームをFFTする第1FFT部42と、第1FFT部からの信号から所定のスレショルドを超えたフィルタバンクの信号のみを抽出し、抽出した信号のバンク番号の平均値または重心値を算出し、そのバンク番号のΣビームを出力するスレショルド抽出部43と、ΔビームをFFTする第2FFT部44と、スレショルド抽出部からのΣビームと第2FFT部からのΔビームに基づき測角する測角部45と、測角により得られた測角値で示される目標方向がビーム中心方向にない場合は指向角を指示するレーダ制御部46を備え、モノパルスビーム再形成部は、指示された指向角をビーム中心方向とする位相モノパルスビームを再形成し、測角部は、再形成された位相モノパルスビームに基づき測角する。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体方向検知システムおよびデータ構造
【課題】安価な構成で、物体の方向を検知することができる物体方向検知システムを提供する。
【解決手段】物体方向検知システム11は、互いに直交する3つの方向になるように物体に取り付けられたRFIDタグ15a、15b、15cと、互いに直交する2つの方向になるように設けられ、複数のRFIDタグ15a〜15cからの返送波の受信が可能なアンテナ16a、16bと、アンテナ16a、16bのそれぞれによって受信したRFIDタグ15a〜15cの返送波の強度、および返送波に含まれる取り付け位置のデータから、物体の方向を算出して検知する制御部18とを備える。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
無線タグシステムおよび無線タグ
【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
物品管理システム
【課題】どの作業者が何処でどの物品を運搬したかを管理することを可能にする。
【解決手段】物品が運搬中であるか所定の場所に置かれたかの状態の遷移を検知して、その状態遷移のタイミングで物品と人物の位置を測位しその測位結果に基づいて物品と人物とを紐付ける。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
無線タグの位置検出システム、操作端末、及び無線タグ通信装置
【課題】複数の無線タグ通信装置による通信結果を用いて、無線タグの位置を精度よく詳細に求める。
【解決手段】無線タグの位置検出システム1は、互いにネットワーク接続可能に配置され、リーダアンテナ5からの通信領域20内に位置する無線タグTに対しそれぞれ情報送受信可能な複数のリーダ2A,2Bと、これら複数のリーダ2A,2Bを操作可能な操作端末3とを有し、各リーダ2A,2Bは、通信領域20が他のリーダ2A,2Bと互いに一部重なるように配置されており、操作端末3は、無線タグTからリプライ信号を受信できた各リーダ2A,2Bからの通信結果に基づき、少なくとも2つのリーダ2A,2Bの通信領域20に関する情報を合成して検出対象の無線タグTの位置を算出する。
(もっと読む)
101 - 120 / 246
[ Back to top ]