
Fターム[5J070AK15]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 複数物標の識別 (246)
Fターム[5J070AK15]に分類される特許
81 - 100 / 246
位置検知システム及び位置管理サーバ
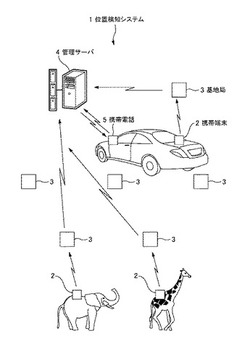
【課題】サファリパーク内の動物の位置情報を自動車に乗った見学者にリアルタイムに提供する。
【解決手段】位置検知システム1は、携帯端末2、基地局3、管理サーバ4及び携帯電話5を備える。携帯端末2は、サファリパーク内の動物や自動車に着設され、携帯端末2に固有の端末IDを発信する。基地局3は、サファリパーク内の各箇所に設置され、通信可能範囲の携帯端末2から端末IDを受信し、端末ID及び自らの基地局IDを管理サーバ4に送信する。管理サーバ4は、サファリパークの管理事務所に設置され、各基地局3から端末ID及び基地局IDを収集し、サファリパーク内の動物及び自動車の位置を示す地図情報を作成し、外部から閲覧可能とする。携帯電話5は、見学者が動物や自車の位置を確認するためのものであり、管理サーバ4から地図情報を受信、表示し、見学者のアイコン選択を受けて、管理サーバ4から動物の属性データを受信、表示する。
(もっと読む)
レーダ装置、測定方法、及び測定プログラム

【課題】FM−CW方式を用いたレーダで目標対象物の検出を行う場合に、複数の目標対象物が存在するときに、上昇区間及び下降区間の各ビート信号を正確に組み合わせることができるレーダ装置等を提供する。
【解決手段】周波数を時間的に変移させた送信波を送信し、目標対象物によって反射された反射波を受信し、送信波と受信した反射波とを混合したビート信号を用いてUP区間とDOWN区間の周波数ピークのペアを決定した結果に基づいて目標対象物の位置と速度を求めるレーダ装置において、異なる測定時間におけるUP区間、又はDOWN区間の一方のピーク対を抽出し、周波数差、及び測定時間間隔から目標対象物の移動距離と速度を算出する。算出した移動速度に対して、同方位測定時間において前記周波数差を満たす、対となるピーク(前記一方のUP区間、又はDOWN区間と異なる他方のUP区間、又はDOWN区間)のペアを決定する。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
レーダ装置
【課題】相対速度が0の物体があった場合でも、検出できるとともに、測定誤差を低減できるレーダ装置を提供することにある。
【解決手段】ランプ波形発生手段120A,120Bは、時間と共にその出力電圧が変化するランプ電圧を発生する。ランプ波形発生手段は、任意電流を発生する任意電流発生手段122と、任意電流発生手段が出力する電流を積分してランプ電圧を発生する積分手段124,126とを備える。スイッチ手段140は、ランプ波形発生手段120Bの出力と基準電圧とを交互に切り替えて出力する。合成手段150は、ランプ波形発生手段120Aの出力と、スイッチ手段140の出力とを合成する。高周波発生手段は、合成手段150の出力電圧を周波数信号に変換し、高周波信号を出力する。制御手段11は、任意電流発生手段122及びスイッチ手段140を制御する。
(もっと読む)
物体検知装置、物体検知システム及び物体検知方法
【課題】位置情報を保有することのない簡単な構成によって、物体の位置、状態等の検知情報を得ることができる物体検知システムを提供する。
【解決手段】 パッシブICタグ12を貼付した一つまたは複数の被検知物体10と、前記タグ12からの電波を受信して前記被検知物体10の被検知情報を検知する一つまたは複数の探索装置20と、前記探索装置20とネットワーク40を介して接続され、前記複数の探索装置20を制御するとともに前記探索装置20が取得した前記被検知情報を得て管理する管理サーバ30と、前記管理サーバ30が取得した情報を格納するデータベース34とで構成され、前記探索装置20は、指向性アンテナ21と、指向性を変更するアクチュエータ22と、方位センサ23、傾斜センサ24と、コントローラ25と、前記指向性アンテナ21の発信電波強度および受信電波強度を制御する電波強度制御部26とを備える。
(もっと読む)
レーダ装置
【課題】複雑な処理をせずとも、互いに略等しい相対距離に存在する対象物の数を検出することのできるレーダ装置を提供する。
【解決手段】画像処理部10は、放射された電磁波が、カメラ101によって撮像された画像に撮像されている他車両で反射した反射波を受信するまでの受信時間を算出する。さらに、画像処理部10は他車両との相対距離を算出し、算出した相対距離と略同じ相対距離に存在する他車両の数を計数し、計数した数と算出した受信時間とを対応づける。レーダ処理部11は、放射された電磁波と反射波との相関を演算しながら、相関がピーク値を生じたときの反射波の受信時間と画像処理部10によって算出された受信時間とを比較して、略等しい受信時間に対応づけられた他車両の数を特定する。レーダ処理部11は、ピーク値を生じた相関の受信時間に基づき相対距離を算出し、特定した他車両の数を対応づける。
(もっと読む)
監視装置
【構成】管理品無線通信タグ(200)および管理者無線通信タグ(300)に基づいて管理対象品(100)の監視を行う監視装置であって、管理品無線通信タグに基づいて管理対象品の存在を検出する第1検出手段(16、34)、管理者無線通信タグに基づいて前記管理者の存在を検出する第2検出手段(16,34)、管理品無線通信タグからの電波に基づいて管理対象品の位置の変化量に応じた値を特定する特定手段(34e)、変化量に応じて時間を計測する計時手段(27)、第1検出手段の検出結果、前記第2検出手段の検出結果、前記特定手段の特定結果、および前記計時手段の計時結果の少なくとも1つに応じて警報を出力する制御手段(16、36、28e)を備える。
【効果】状況に応じて的確な警報を出力することができる。
(もっと読む)
飛しょう体のレーダ装置
【課題】追跡目標を見失った時や複数の追跡目標が生じた時にも高精度に目標を追跡できる飛しょう体のレーダ装置を提供する。
【解決手段】複数のビームを形成して追跡目標の捜索を行う第1の信号処理部及び単一のビームを形成して追跡目標の追跡を行う第2の信号処理部及び受信信号から複数の追跡目標の方向を推定する第3の信号処理部と、を備える。アンテナ制御部60が、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43のうちいずれが信号を処理するかを択一的に切り替え、第3の信号処理部43がMUSIC法を用いて受信信号から複数の追跡目標の方向を推定する。また、第1の信号処理部41及び第2の信号処理部42及び第3の信号処理部43が並行して追跡目標70の判定と追跡を行う。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置で、演算処理量や処理時間を最小限に抑えながら物体の距離や相対速を精度良く算出できるようにする。
【解決手段】 FM・CW型のレーダー装置Rにおいて、物体候補情報記憶手段M5が、各検知エリアにおける上昇側および下降側のピーク信号の組み合わせに基づいて求められる物体との距離または相対速を物体候補情報として記憶すると、グルーピング手段M7が、任意の検知エリアにおいて求められるピーク信号1とその他の検知エリアにおいて求められるピーク信号2との周波数差が所定値以下であり、かつ前記物体候補情報記憶手段M5に記憶されているピーク信号1による物体候補情報とピーク信号2による物体候補情報とが略等しい場合に、両ピーク信号をグルーピングし、更に物体情報算出手段M8がグルーピング処理後の上昇側および下降側のピーク信号の組み合わせに基づいて物体との距離または相対速を算出する。
(もっと読む)
適合領域検出装置
【課題】二次元以上の領域を検出する場合でも、演算の場合分けを行うことなく、高速に適合な領域を検出することができるようにする。
【解決手段】方向を識別する再帰識別子と方向別の各端点の位置に対応する特徴からなる再帰索引レコードを生成する再帰索引生成部1と、相互に領域の重複関係がある複数の再帰索引レコードを取得し、複数の再帰索引レコードから新たな再帰索引レコードを演算する再帰索引演算部4とを設け、再帰索引検索部5が再帰索引蓄積部2に蓄積されている再帰索引レコードの中から、特徴に関する検索条件に合致する再帰索引レコードを検索する。
(もっと読む)
レーダ信号処理装置
【課題】 追尾レーダによる目標検出において、同レンジに2目標検出された際に、両目標をトラッキングし、そのレンジ及び受信信号強度の挙動を継続して観測する事により真の目標とJEMの判別をすることが可能なレーダ信号処理装置を得る。
【解決手段】 目標で反射された受信電波を観測し、前記目標の検出信号とJEM(Jet Engine Modulation)により変調された検出信号とを判別して、前記目標を検出するレーダ信号処理装置であって、前記受信電波の振幅の比較に基づき前記目標の候補として複数検出された同一レンジセル内にある検出信号の各々について所定時間その強度変化を計測し、前記強度変化が所定の範囲内である検出信号を前記目標の検出信号であると判断し、前記強度変化が所定の範囲を越える検出信号を前記JEMにより変調された検出信号であると判断する目標判別部を備える。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
レーダ装置
【課題】 レーダ部における個々の周波数帯域や観測する角度を制御して、任意の周波数帯域を選択可能なレーダ部を使用した場合においても、目標の推定姿勢及び各レーダ部の使用可能帯域から各レーダ部の空間周波数領域上の観測領域を算出し、空間周波数領域での所望の信号領域を観測する新規なレーダ装置を提供すること。
【解決手段】 リソース管理部から出力される各レーダ部の観測可能な方位・時間・送信周波数・周波数帯域から目標姿勢推定処理部が推定した目標が観測された時刻以降の所定の時刻毎に前記目標の姿勢と前記各レーダ部とのアスペクト角をそれぞれ算出し、観測条件算出部に入力された観測条件を満たす空間周波数領域上の信号領域である要求領域に対し、目標の姿勢となすアスペクト角が一致するレーダ部の観測領域の割り当てを決定し、この割り当てに基づいて複数のレーダ部に目標を観測させる観測計画算出部とを備えたことを特徴とする。
(もっと読む)
レーダ情報表示装置
【課題】 管制情報と気象情報とをこれらの予測を含め関連づけして把握することが可能な、航空管制の安全性向上に寄与するレーダ情報表示装置を得る。
【解決手段】 管制レーダ等により取得された管制レーダ情報と、気象レーダ等により取得された気象レーダ情報を受けとって、それぞれに順次記憶し、航跡及び気象状況としてその履歴を保持する。また、これらの記憶に基づき所定時間経過後までの航跡及び気象状況を予測する。そして、表示に際しては、これら履歴及び予測結果の所定時間遡った時刻から所定時間経過後の時刻にわたる時間幅分に対して、管制レーダ情報及び気象レーダ情報を同一画面上に重畳して統合表示する。
(もっと読む)
レーダ装置
【課題】
カメラを用いずに、自車の前方に存在する二台の車両の中間地点に車両が存在している、という誤検知を回避することを目的とする。
【解決手段】
レーダシステムは、自車左前方に設置された第1のレーダ装置と、自車右前方に設置された第2のレーダ装置と、を備え、前記第1及び第2のレーダ装置は、それぞれ、前方に存在する複数の物体を分離して検出するための分解能の間隔をおいて設置される。第1及び第2のレーダ装置の電波照射範囲は、それぞれ、自車の走行路上で重複し、かつ、左右の隣接車線路上で重複しないように調整されてもよい。又、第1のレーダ装置の電波照射範囲から得られる検出結果、及び、第2のレーダ装置の電波照射範囲から得られる検出結果との差異に基づいて、自車の前方に存在する複数の物体を分離して検出してもよい。
(もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
物体位置認識システムおよび方法
【課題】 リーダアンテナ51などの構成を簡単にすることができるとともに、電子タグ23の物体情報を正確に素早く読み取ることができる物体位置認識システムを提供する。
【解決手段】 アンテナ形成対象部材14に配置されることができかつ複数個の電子タグ付き位置認識対象物体11が行列状に配されることができる物体配置用ラック12を備え、アンテナ形成対称部材14に配設されているリーダアンテナ51が行方向にほぼ沿って配されている複数個の位置認識対象物体11の物体情報を各行ごとに読み取ることができる行方向読み取り用のアンテナ状態と、リーダアンテナ51が列方向にほぼ沿って配されている複数個の位置認識対象物体11の物体情報を各列ごとに読み取ることができる列方向読み取り用のアンテナ状態とが得られるように、アンテナ形成対象部材14に対する物体配置用ラック12の相対的な配置を変更し得るように構成されている。
(もっと読む)
レーダー装置
【課題】低い演算負荷で測定範囲の対象物との相対速度や相対距離などを測定することができるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物で反射した反射波のレベルを予め定めた閾値と比較する。そして、予め定めた閾値以上となる反射波のみに基づいて対象物との相対距離として測定し、当該反射波をフーリエ変換処理することによってドップラー周波数を算出し、算出したドップラー周波数に基づいて対象物との相対速度を算出する。
(もっと読む)
フェーズドアレイアンテナ
【課題】DBF手法によってマルチビームを形成する方向を瞬時に切換え選択して出力するフェーズドアレイアンテナを得る。
【解決手段】仰角方向及び方位角方向の2次元にマトリクス状に配列されたアンテナ素子で受信した信号を2分配し、各列(縦方向、すなわち仰角方向)毎、及び各行(横方向、すなわち方位角方向)毎にRF電力合成を行なう。そして、各列毎、あるいは各行毎に合成された信号のどちらか一方を選択することによって2次元のアンテナ開口面においてRF電力合成する一方向を選択するとともに、選択した合成信号を用いてDBF手法によるビーム形成処理を行ない、もう一方の方向に対してマルチビームを形成する。そして、各列毎、あるいは各行毎に合成された信号の選択を切り換えることによって、その方向を電子的かつ瞬時に入れ替える。
(もっと読む)
81 - 100 / 246
[ Back to top ]