
Fターム[5J070AK15]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 複数物標の識別 (246)
Fターム[5J070AK15]に分類される特許
61 - 80 / 246
信号処理装置、及びレーダ装置
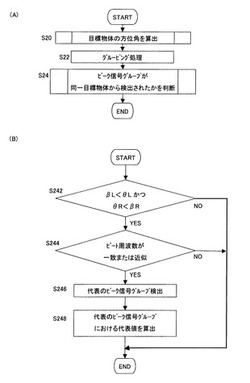
【課題】 個々のピーク信号グループが目標物体ごとに検出されたか否かを判断し、目標物体の誤検出や検出もれを回避する。
【解決手段】 周波数変調したレーダ信号を探索領域内の方位角ごとに送受信し、送受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、方位角ごとにビート信号の周波数スペクトルにおけるピーク信号を検出し、隣接する複数の方位角で周波数が一致または近似し、かつ極大値を形成するピーク信号グループを検出し、前記ピーク信号グループに基づき相対距離もしくは相対速度、及び方位角を含む目標物体情報を検出する際に、前記探索領域の撮影画像から認識された前記目標物体の方位角に複数のピーク信号グループの方位角が対応する場合には、当該複数のピーク信号グループにおける代表ピーク信号グループに基づき前記目標物体情報を検出する。
(もっと読む)
状況表示装置

【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置でターゲットを一旦ミスペアリングした場合に、正しいペアリングのデータを遅滞なく出力して制御の応答性を高める。
【解決手段】 今回ペアリング候補選定手段S9は、今回相対関係および前回相対関係が同一の物体に基づくものか否かを判定し、同一の物体に基づくものと判定された場合に、今回相対関係の算出および前回相対関係の算出に用いられたペアリング候補を正しいペアリング組み合わせとして確定する。ペアリングフィードバック処理手段S10は、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、組み合わせが確定していないペアリング候補に基づいて前回相対関係を更新する。このように、今回相対関係および前回相対関係が同一の物体に基づくものではないと判定された場合に、前回相対関係に遡って今回相対関係の正誤を検証するので、正しい今回相対関係を速やかに確定させて制御の応答性を高めることができる。
(もっと読む)
RFIDタグを用いた位置確認システム
本発明は、RFIDタグを利用したU(ユビキタス)−安心サービスであって、従来のRFIDを利用したシステムが空間的な制約を多く受け、一つのアパート団地、テーマパークなどのように、局所的に使われていたことに対して、本発明は、広い認識範囲を有するRFIDリーダを街頭の所々に位置させ、前記RFIDリーダを通じて位置情報を受信しつつ、また、携帯電話に設置されたまた他のRFIDリーダを通じて、RFIDをクリックする回数に応じて、予め保存されたメッセージとともに運営サーバに伝送することによって、使用者が無事であるというメッセージを通じて使用者の保護者を安心させることができ、また、保護者は、使用者の位置情報を運営サーバを通じて随時把握することができ、危急な状況が発生した場合には、社会的セーフティネットに直ちに連結するようにすることで、危急な状況に迅速に対処できるようにするシステムを提供する。 (もっと読む)
電波源識別装置
【課題】振幅対位相特性を過不足なく抽出して電波源の識別をする。
【解決手段】信号検出部12は未知電波源からの受信信号BSの信号諸元を検出し、記録保存装置16は受信機雑音の分散σn2及び既知の送信装置名と関連付けられた複数の振幅対位相特性APCrefを記録する。平均電力出力部13aは移動窓を用いて受信信号BSを部分的に抽出し、部分信号の平均電力PSを算出する。検定部13bは平均電力PSが受信機雑音の分布と合致するか否かの棄却検定を行い、受信信号の立ち上がり始点kus及び立下り終点kdeを抽出し、端点抽出部13cは受信信号の立ち上がり及び立下りの区間Γu,Γdを決定する。波形抽出部13dは区間Γu及びΓdに対応する振幅変化部分AF及び位相変化部分θFを抽出し、特徴量抽出部14は線形変換により振幅対位相特性APCを抽出し、照合部15は振幅対位相特性APC,APCrefを照合する。
(もっと読む)
レーダ装置
【課題】ターゲットの方向や個数を正しく算出できるレーダ装置を得る。
【解決手段】方向算出部32は、ターゲット40の複数変調区間のピーク周波数が0付近である場合に、ピーク周波数が0付近のピーク周波数スペクトラムから生成される共分散行列の加算を禁止する共分散行列加算禁止部33を有し、ピーク周波数が0付近外のピーク周波数スペクトラムから生成される共分散行列を加算した加算共分散行列に基づいてターゲット40の方向を算出する。
(もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
信号処理装置
【課題】センサでの観測データにより未知パラメータを推定する方法に用いる信号数の推定には、従来、経験則による閾値を用いるため、高精度な未知パラメータの推定ができない。
【解決手段】キュムラント行列演算手段で求めた、センサでの観測データの高次統計量に基づくキュムラント行列から、固有値固有ベクトル演算手段が固有値と固有値に対応する固有ベクトルに分解し、符号判定手段が分解された固有値の符号が反転するときまでの固有値数を検出して信号数を推定し、パラメータ推定手段で、符号が反転するときまでの固有値に対応する固有ベクトルを用いて、未知パラメータを推定する。
(もっと読む)
レーダ信号処理装置、及びレーダ信号処理方法
【課題】本発明は、複数の比較的明るいターゲットが互いに近接する場合に、そのターゲットによる検出精度への影響を抑えることができるとともに、処理負担を軽減させることができるレーダ信号処理装置、及びレーダ信号処理方法を提供する。
【解決手段】セル積分回路部101は、レーダ信号の平均化セル領域内の振幅値を積分し、振幅値積分データを算出する。最大振幅値比較部102は、平均化セル領域内でのレーダ信号の最大振幅値を取得する。最大振幅値比較部102は、取得した最大振幅値の情報を除去データとして最大振幅値記憶部103に記憶させる。閾値基礎データ算出部104は、振幅値積分データに基づく積分値から、除去データに基づく最大振幅値を差し引く。これによって、閾値基礎データ算出部104は、最大振幅値除去後の振幅積分データである修正積分データを算出する。
(もっと読む)
車両周辺監視装置
【課題】レーダからの反射波を受信して物標を検出する場合に、物標の検出精度を向上させる。
【解決手段】車両周辺監視装置1のECU30に、レーダ10が取得した他車両からの反射波の反射ピークに基づいて物標を検出するとともに、所定のグルーピング条件を満たす複数の物標をグルーピングし、この物標が所定の確定条件を満たす場合に、この物標の検出を確定して追跡するトラッキング部31と、物標が確定条件を満たさない場合に、前回の予測値に基づいて物標の補間処理を行う補間処理部32と、警報を発生させる警報処理部33とを備える。そして、補間処理部32は、物標が確定条件を満たさない回数が所定回数を超えると、物標の予測周波数範囲f’における反射ピークの数が所定の閾値以上であって、予測周波数範囲f’における反射ピークのパワー平均値が所定の閾値以上であった場合に限り、補間処理を延長する。
(もっと読む)
航跡割当装置
【課題】多スタート局所探索においてMFA問題の最適解探索を精度良く効率的に行うことのできる航跡割当装置を得る。
【解決手段】観測値情報取得部1と、観測値情報格納部2と、航跡候補生成部3と、航跡候補格納部4と、初期解生成部5と、最良解格納部6と、新規解生成部7と、新規解格納部8と、最良解更新部9と、ビルディングブロック候補情報格納部10と、ビルディングブロック判定部11と、ビルディングブロック情報格納部12と、終了判定部13と、探索結果出力部14とを備えている。新規解生成部7は、ビルディングブロックと判定された構成要素が必ず含まれるように新規解を生成する。最良解更新部9は、多スタート局所探索時にK個の最良解のうちのL個以上の最良解に同じ構成要素が含まれる場合に、当該構成要素をビルディングブロック候補と判定して登録する。
(もっと読む)
モノパルスレーダ装置
【課題】マルチパス干渉状態で適切な信号処理を実行できるように、マルチパス干渉が起こっているか否かを精度良く判定することが可能なモノパルスレーダ装置を提供する。
【解決手段】モノパルスレーダ装置101は、送信部104から電波を放射し、その反射波を複数の受信部105(a)、105(b)で受信して、自車両201の前方に存在するターゲット車両301〜306を検知するものであって、予め設定された時間間隔を空けて検知した複数回の検知結果に基づいて、マルチパス干渉が起きているか否かを判定するマルチパス干渉判定手段を備える。かかる構成により、1回の信号強度比較結果に基づいてマルチパス干渉が起こっているか否かを判定する場合と比較して、精度良く判定することができ、マルチパス干渉が起こっている場合に、干渉時の特性に応じた信号処理を用いて、より適切な処置を行うことができる。
(もっと読む)
人分布計測システム及び人分布計測方法
【課題】平面上の人の分布を計測可能な人分布計測システムを提供する。
【解決手段】それぞれ識別可能な電波を送受信する複数の送受信機5A-5L、送受信機5A-5Lの複数の対のそれぞれについて、受信電波の変動をモニタする変動モニタ301、送受信機5A-5Lの複数の対のそれぞれについて、人の存在が電波に与える影響度の平面分布を保存する影響度記憶部402、送受信機5A-5Lの複数の対のそれぞれについて、影響度に電波変動の大きさを乗じて算出される、人の存在可能性の平面分布を算出する存在可能性算出モジュール302、及び送受信機5A-5Lの複数の対のそれぞれについて算出された存在可能性の分布を足し合わせる足し合わせモジュール303を備える。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】複数の目標物体から得られたレベルの異なるビート信号の周波数が近接する場合であっても、それぞれの目標物体を検出する。
【解決手段】周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置のピーク信号検出手段は、前記周波数スペクトルのレベルの周波数方向における変化率に基づき、前記極大値を形成する第1のピーク信号から所定周波数範囲内で極大値を形成しない第2のピーク信号をさらに検出するので、第1のピーク信号とそのサイドローブに埋もれて極大値を形成しない第2のピーク信号のそれぞれに対応する目標物体を検出することができる。
(もっと読む)
パルスレーダ装置
【課題】目標数が多数の場合であっても、少ない数のPRIを用いて目標までの相対距離を求めることのできるパルスレーダ装置を得る。
【解決手段】PRI設定器1、複数のPRIごとにパルス列Bを目標Aの方向に送信し、反射信号Cを受信してレンジビンごとの受信ビデオ信号を生成する送受信部100と、複数のPRIごとに、複数の受信ビデオ信号を同じレンジビンごとにフーリエ変換して、複数の距離速度マップを生成する複数距離速度マップ生成器17と、複数のPRIごとに生成された複数の距離速度マップごとに目標を検出する目標検出器18と、異なるPRIに対する距離速度マップで検出された複数の目標の間の同一性を、複数の目標の速度情報を用いて判定する同一目標判定器19と、同一目標に対するPRIごとに生成された距離速度マップのレンジビン情報とPRI情報とを用いて、同一目標の相対距離を求める測距器20とを備えている。
(もっと読む)
位置測定システム、無線通信装置及び位置測定方法
【課題】屋内などのエリアに配置された物品の位置管理を少ない消費電力で実現する。
【解決手段】RFID及び無線通信機を含む端末と、RFIDと通信する読み取り装置と、無線通信機と無線によって通信する基地局と、を備え、所定のエリアにおける端末の位置を測定する位置測定システムで、読み取り装置は、所定のエリアに端末が入った場合には、端末に含まれるRFIDに、端末が所定のエリアに入ったことを示す第1の信号を送信し、RFIDは、第1の信号を受信すると、無線通信機を起動させ、基地局は、無線通信機と通信することによって、端末の位置情報を取得し、読み取り装置は、所定のエリアから端末が出た場合には、端末に含まれるRFIDに、端末が所定のエリアから出たことを示す第2の信号を送信し、RFIDは、第2の信号を受信すると、無線通信機を停止させる。
(もっと読む)
物標検出装置
【課題】アンテナ素子数を増加させることなく、静止した複数物標の検出性能を向上させる。
【解決手段】FMCW波の送受信動作を必要なスナップショットの必要数だけ繰り返すと共に、送受信動作毎に、FMCW波の中心周波数を変化させる(S110〜S130)。送受信動作(スナップショットSSi,i=1〜4)毎に、ビート信号データをFFT処理することで周波数スペクトラムを求め、その周波数スペクトラム上でピークとなる対象周波数kのデータx1(k)〜xN(k)を、全受信チャンネルCH1〜CHNから抽出し,配列した受信ベクトルXi(k)を生成し、受信ベクトルXi(k)のそれぞれについて相関行列Rxx_ssi(k)を求める。更に、相関行列Rxx_ssi(k)を、対象周波数k毎に平均(時間平均)した平均相関行列HRxx(k)を算出し、平均相関行列HRxx(k)から求めたMUSICスペクトラムにより、物標が存在する方位を求める(S140〜S180)。
(もっと読む)
個別認識装置及び個別認識システム
【課題】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置と個別認識システムを提供する。
【解決手段】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置であって、センシング中央にセットしてセンサ周囲の環境形状を測定するレーザーレンジファインダと、各物体に貼付されたICタグに記録された情報を蓄積したデータベースと、システム中心から各物体の距離を読み取れるICタグリーダと、レーザーレンジファインダで得た環境形状変化と、ICタグリーダで得たICタグ情報と、システム中心から前記各物体までの距離変化から、データベースに蓄積した情報を元に、各ICタグが添付された対象物情報、位置、移動ベクトルを算出し、各対象物の移動予測を行ない各対象物を認識する判別器から構成した個別認識装置及び個別認識システムである。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
リーダライタ、及び物品位置検出システム
【課題】ある時刻tにおけるタグの位置(x,y)を高精度に推定することができるリーダライタ、及び物品位置検出システムを提供する。
【解決手段】このPC(制御手段)9は、リーダライタ1と情報の授受を行なう通信部10と、リーダライタ1から得られたプロファイル7を記憶するプロファイル記憶部(プロファイル記憶手段)11と、プロファイル記憶部11に記憶された基準となるタグに係る基準プロファイルと物品の情報を記録したタグに係る物品プロファイルとを比較するプロファイル比較部(プロファイル比較手段)13と、ベルトコンベア10に係る基準位置を算出する基準位置算出部14と、制御部12と、を備えて構成されている。
(もっと読む)
61 - 80 / 246
[ Back to top ]