
Fターム[5J070AK15]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833) | 複数物標の識別 (246)
Fターム[5J070AK15]に分類される特許
41 - 60 / 246
距離測定装置
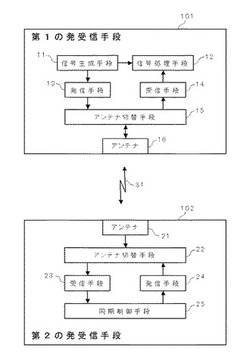
【課題】複数の発受信手段の間で、時分割でかつバースト信号によって相互通信を行う場合に、相互間の距離を高精度で測定することができる距離測定装置を安価に実現する。
【解決手段】第1の発受信手段101から距離測定要求信号を時分割でかつバースト信号として発信し、これを受信した第2の発受信手段102において、前記距離測定要求信号に含まれる起点信号に同期しあるいは直交する距離測定信号を生成して時分割でかつバースト信号として発信し、これを受信した第1の発受信手段101において、前記起点信号をクロック信号とし、積和演算器を用いて前記距離測定信号の位相をリアルタイムで測定し、前記位相の測定結果から、第1の発受信手段101と第2の発受信手段102との間の距離を高精度で算出する。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法

【課題】モードSによる運用を継続しながら、マルチパスの影響で発生するゴースト機のアジマス領域の測定を行い得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴーストターゲットやリアル機からモードA/Cによる応答信号を返送させ、モードAアドレスが重複して検出される方位の分布を測定するようにしている。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】ゴースト応答の判定の確実性を向上し得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】複数のレーダ地上局による重複監視領域をSLO設定領域とし、制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標情報をアドレスとともにメモリ17に記憶しておき、SLO設定領域に対しSLO走査と非SLO走査とを実行し、SLO走査と非SLO走査とにより応答信号を返送する目標のアドレスと、メモリ17に登録されロールコールに移行した目標のアドレスとが一致するか否かを判定し、一致する場合に、SLO質問に対し返送された応答信号をゴースト応答として検出するようにしている。
(もっと読む)
測角装置
【課題】モノパルス測角に加えて、ビーム内に到来する複数の目標信号を分離・測角する能力を有するとともに、高い測角性能と低コスト化を実現可能な測角装置を得る。
【解決手段】到来する目標信号をアンテナ1で受信した受信信号からΣおよびΔビームを形成する第1のΣ&Δビーム形成手段4と、受信信号およびΣビームからΣビームをガイディングセンサとするΣΣキュムラント行列を推定する第1のΣΣキュムラント行列推定手段5と、受信信号、ΣおよびΔビームからΣおよびΔビームをガイディングセンサとするΣΔキュムラント行列を推定する第1のΣΔキュムラント行列推定手段6と、ΣΣキュムラント行列およびΣΔキュムラント行列から目標信号の到来角に応じたモノパルス比を推定する第1のモノパルス比推定手段7と、モノパルス比をモノパルスディスクリパターン9に参照し、目標信号の到来角を測角するモノパルス測角手段8とを備える。
(もっと読む)
目標検出装置
【課題】重複選択に起因する目標画素の広がりの発生を適切に抑制し低SNR環境下における目標検出精度を向上させる。
【解決手段】尤度比算出部3からの尤度比に基づき現フレームの観測画像の各画素に対する加算処理順を決定する加算処理順決定部5と、現フレームの観測画像の各画素に対し、加算処理部6からの加算処理結果に基づいた選択処理を行い、選択対象が他の現フレームの観測画像画素と競合し競合する画素と同じ対象を選択する重複選択が発生する場合は、重複選択を許容するか否かを判定して選択処理を行う選択処理部7とを有し、加算処理順決定部5は、尤度比が大きい画素に対する加算処理が優先的に行われるように加算処理順を決定し、選択処理部7は、対象画素の加算処理結果としてのトラックスコアが競合画素のトラックスコアの最小値よりも大きいか、または対象画素の推移確率が競合画素の推移確率の最小値よりも大きければ、重複選択を許容する。
(もっと読む)
目標追尾装置
【課題】必要最小限のネットワーク通信容量で、各センサにおける送信制御または各センサを管理する管理サーバによる送信要求制御を行うことを可能にし、ネットワーク通信容量の低減を図った目標追尾装置を提供する。
【解決手段】センサ側からセンサ観測情報を集約した再追尾センサ航跡をネットワークに流すことにより、センサ観測情報を全て出力する従来方式に比べネットワークに流すデータ量を低減させる。センサ側において、送信判定処理部1107により、自律的に自センサの再追尾センサ航跡が融合航跡の航跡精度に寄与するか否かによりネットワークに送信するか否かの送信判定を行い、寄与する場合のみ、再追尾センサ航跡を伝送することにより、必要最小限のネットワーク通信容量で、融合航跡の追尾精度を確保する。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
距離測定装置
【課題】トランスポンダの応答効率を容易及び正確に算出し、トランスポンダの監視を正確に行う。
【解決手段】質問信号に応答する応答信号と、局識別符号を出力するトランスポンダ12と、トランスポンダ12に制御信号を出力し、局識別信号送信中信号を生成する制御部15と、質問信号を出力するトランスポンダ検査手段131、応答信号を入力するとトランスポンダ12の異常を判定する動作判定手段137及び制御部15から局識別符号送信中信号を入力する期間、応答効率算出停止信号を出力する局識別符号判定手段138を有する監視処理部13と、航空機から受信した質問信号をトランスポンダ12に出力するとともにこの質問信号に対する応答信号を送信し、監視処理部13から入力する質問信号をトランスポンダ12に出力するとともにこの質問信号に対する応答信号を出力し、局識別符号を航空機及び監視処理部に出力するスイッチ回路14とを備える。
(もっと読む)
レーダ制御装置、該装置に用いられるレーダ監視覆域設定方法及びレーダ監視覆域設定プログラム
【課題】限定された数のレーダを用いて多数の目標を探知する場合に、目標の出現が予想される地点が効率的に含まれるようにレーダの監視覆域を設定するレーダ制御装置を提供する。
【解決手段】監視覆域候補計算手段20により、目標予想点情報fcに対してレーダR1 ,R2 毎に階層的クラスタリングが行われ、クラスタリング結果のクラスタからレーダR1 ,R2 の監視覆域の組合せの候補caが算出される。監視覆域組合せ計算手段30により、監視覆域の組合せの候補caの中から、一方のレーダで探知され、かつ他方のレーダで探知されない目標予想点が探知される監視覆域から優先的に漸次決定することにより、レーダR1 ,R2 の監視覆域が算出される。最急降下法計算手段40により、監視覆域組合せ計算手段30で算出された全てのレーダの監視覆域に対応するパラメータを初期値として、最急降下法を用いて評価関数の値が最大となる監視覆域のパラメータmaが算出される。
(もっと読む)
レーダ装置
【課題】複数目標の方位角及び仰角を時分割で計測するレーダ装置において、複数目標の方位角及び仰角の対応付けを正しく行うことを目的とする。
【解決手段】複数の反射波受信部で得た反射波信号を合成する信号合成手段5a、5b、複数の反射波受信部で異なる複数の位相中心配置を得るため各反射波受信部から信号を切替て信号合成手段に出力する手段4a,4b、合成信号の位相検波、A/D変換をする手段6a、6b、そのデジタル信号から目標信号を検出する目標検出処理装置7、目標信号から上記位相中心配置のうちの所望位相中心配置での複数目標の角度と位相変化量を求める測角処理装置8、所望位相中心配置での複数目標の角度θiと別の所望位相中心配置での複数目標の角度φiとの対応付けを所望位相中心配置での複数目標の位相変化量γiと別の所望位相中心配置での複数目標の位相変化量ηiで行うペアリング処理装置9を有す。
(もっと読む)
無線IDタグのマッピングデータ作成装置及び方法
【課題】本発明は、多数の無線IDタグが配列されたシート体について無線IDタグのマッピングデータを効率よく行うことができる無線IDタグのマッピングデータ作成装置を提供することを目的とするものである。
【解決手段】複数の無線IDタグが配列されたシート体Sを搬送し、読取部10において所定の読取位置に位置決めされた読取素子により搬送移動中の無線IDタグと個別に交信してIDデータを取得し、測定部30において搬送移動中のシート体の搬送距離を測定し、読取部10おいて取得されたIDデータ及び当該IDデータの取得時に測定された搬送距離に基づいて無線IDタグのマッピングデータを作成する。
(もっと読む)
レーダ装置及びそれを用いた電波到来方向の計測方法
【課題】レーダの検出視野内に複数の物体が存在し、それらによる反射波のドップラー周波数が同一となる状況でも、各ターゲットの方位を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】レーダで観測されるドップラー信号を、同一のドップラー周波数を発生させるターゲットごとに分類し、レーダとターゲットとの相対的な位置関係が異なる時刻の反射波のデータを平均化した相関行列を作成し、前記相関行列を用いてレーダ受信器の受信強度パターンの方位角依存性を変化させることによって、ターゲットの方位を計測するレーダ装置。
(もっと読む)
検出システム及び検出方法
【課題】RFIDタグを検出することができる。
【解決手段】検出システム1はRFIDタグを内蔵するICカード2の周囲に配置され、RFIDタグとの間で信号をそれぞれ送受信する少なくとも3つのリーダライタ部3と、検出処理装置4とを有する。検出処理装置4は、リーダライタ部3にRFIDタグへ第1信号をそれぞれ送信させ、第1信号を送信した送信時刻と、第1信号の受信に応じてRFIDタグから送信された第2信号をリーダライタ部3が受信した受信時刻とをリーダライタ部3ごとに計測させる。また、送信時刻と受信時刻とを取得して、送信時刻と受信時刻とに基づきリーダライタ部3からRFIDタグまでの距離を伝搬する信号の伝搬時間をそれぞれ測定し、伝搬時間を基に距離をリーダライタ部3ごとに演算し、距離からRFIDタグの位置を演算する。
(もっと読む)
目標表示装置
【課題】目標の位置精度に関する詳細な情報を得ることができる目標表示装置を提供する。
【解決手段】目標の誤差範囲境界線の倍率を設定する操作部1aと、外部から入力される目標の推定値および該推定値の誤差を示す誤差共分散行列と、操作部で設定された倍率とに基づき、目標の誤差範囲境界線を算出する制御部2aと、制御部で算出された目標の誤差範囲境界線を表示する表示部3を備える。
(もっと読む)
レーダ装置
【課題】受信アンテナの個数を多くすることなく、多くの物体の方位を高精度に検出する。
【解決手段】レーダ装置1の制御部11は、複数個の送信信号を生成し、各送信信号を、それぞれ、送信部12を介して互いに相違する領域に向けて送出する送信指示部111と、受信部13を介して、前記複数個の送信信号にそれぞれ対応する受信信号を受信し、受信された受信信号毎に、MUSIC法等を用いて、物体の存在する方位(=前記受信信号の到来する方位)を高分解能で検出する受信信号処理部114と、を備える。
(もっと読む)
レーダシステム
【課題】単体で方位の異なる複数目標の同時観測を行い、各目標の高分解能画像を取得できるレーダシステムおよび信号処理方法を提供する。
【解決手段】航空機11が観測目標4を追尾し画像化するシステムにおいて、ビーム12を次々に切替えながらLPRF以上のパルスを送信する。すなわち、現状では送信した後ずっと目標方向を見ていたビーム12を、他方位の観測目標にも向けて観測を行う。ISAR画像解析において、本当に必要なのは観測目標4からの反射波だけであるので、受信ゲート14を開くタイミングを制御することで、受信ゲート14を従来の1目標あたりのPRI17よりも十分に小さくすることができる。このように、ビーム制御機能とタイミング制御機能を付加することで、多方位の複数の目標を同時に観測することができる。
(もっと読む)
管理システム、対象物、対象物管理方法、および対象物管理プログラム
【課題】 比較的安価で、ユーザに対し所定の報知を行うことのできる管理システムを提供する。
【解決手段】 本発明の管理システムは、対象物の位置を検知する位置検知手段と、検知した前記位置から求めた隣接する対象物との距離に対する判別を行う判別手段と、前記判別の結果に応じて、前記対象物に予め配置された報知手段を制御する報知制御手段とを備える。
(もっと読む)
物体検出装置および物体検出方法
【課題】レーダ装置が検出した物体を精度良くグループ化することのできる物体検出装置および物体検出方法を提供する。
【解決手段】物体検出装置は、車両周辺の物体を検出することによって得られた捕捉点を示す信号を用いて、当該捕捉点それぞれの移動方向を算出する移動方向算出手段と、予め検出対象となる物体の形状に応じた枠および当該物体で想定されている進行方向として当該枠に進行基準方向を設定し、上記捕捉点のうち、上記移動方向に当該進行基準方向を合わせた当該枠内に存在する捕捉点を同じ物体の捕捉点として判定する判定手段とを備える。
(もっと読む)
レーダ追尾装置、レーダ追尾方法及びプログラム
【課題】探知能力を向上させることが可能なレーダ管制装置、レーダ追尾方法及びプログラムを提供する。
【解決手段】PARを用いたレーダ管制装置において、外部システム1から入力した航空機の飛行情報に基づいて、時刻毎の着陸誘導機数を算出し、前記着陸誘導機数に応じてPAR3の時刻毎の追尾ビーム数を制御する制御手段2を備える。
(もっと読む)
41 - 60 / 246
[ Back to top ]