
Fターム[5J070BC05]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 態様 (846) | 位置又は方位 (359)
Fターム[5J070BC05]に分類される特許
301 - 320 / 359
測距システム
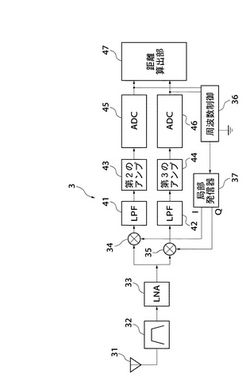
【課題】 パルス列を構成する各パルス信号の到達時間から距離を算出する測距システムにおいて、より誤差を軽減させた高精度の距離測定を実現する。
【解決手段】 互いに等振幅で構成されるパルス信号につき等時間間隔で並べたパルス列を順次生成し、パルス列生成手段により生成されたパルス列を電波として送信する送信装置2と、送信装置2から送信された電波としてのパルス列を受信し、受信したパルス列を構成する各パルス信号の到達時間を求め、パルス信号毎に求めた到達時間につき各パルス信号間で互いに異なる重み付けをして送信装置からの距離を算出する距離算出部47を有する受信装置3とを備え、距離算出部47は、受信したパルス列を構成するパルス信号の振幅が大きくなるにつれて重み付けを重くする。
(もっと読む)
ビーコン受信機及びビュアーシステム

【課題】 ビーコン送信機を持った被写体を探すために、受信装置を見たり、双眼鏡を見たりする煩わしさを解消することができるビーコン受信機及びビュアーシステムを提供する。
【解決手段】 ビーコン受信機は、ビーコン受信部11Aがビーコン電波を受信して複数の方向の電波強度を検出すると、判定部21が検出された電波強度データに基づいて電波強度が最大の方向を判定して最大の電波強度とその方向を含むビーコン受信情報を出力し、情報可視化部15はビーコン受信情報を入力して可視化する一方、風景取り込み部13が所定の被写体の画像を取り込むと、重畳部14が情報可視化部で可視化されたビーコン受信情報と風景取り込み部で取り込まれた画像情報とを重畳し、ビュアー部12は重畳された情報を表示するように構成されている。ビュアーシステムはビーコン送信機と上記のビーコン受信機とでシステムを構成したものである。
(もっと読む)
行動検出システム
【課題】 低コストでかつ日頃の徘徊の程度のような行動パターンを容易に検出可能な行動検出システムを提供する。
【解決手段】 行動検出システムは、人が保持し、トリガー信号に応答してID番号を出力するIDタグと、それぞれが異なる機能を提供する複数の位置にそれぞれ設けられ、トリガー信号を発信するトリガー信号発信部と、IDタグの出力したID番号を受信するトリガー信号受信部と、複数のトリガー信号受信部に接続され、トリガー信号受信部の受信したID番号をその受信時刻とともに保持するデータ保持手段と、データ保持手段の保持するデータの中から、特定の人のデータを抽出する抽出手段と、抽出手段の抽出したデータに基づいて、所望の表示を行なう表示手段とを含む。
(もっと読む)
無線タグ通信装置及び無線タグ管理システム
【課題】 消費電力を抑えて効率的な無線タグ管理を行う無線タグ通信装置及び無線タグ管理システムを提供する。
【解決手段】 無線タグ14との間の通信指向性を順次切り換えるように制御する指向性制御部34と、その指向性制御部34により切り換えられるそれぞれの通信指向性における前記無線タグ14からの返信信号を比較し、その比較結果に基づいてその無線タグ14の移動を判定する無線タグ移動判定部64とを、含むことから、前記無線タグ14との間で必要十分な通信を行うことでその無線タグ14の移動を判定することができる。すなわち、消費電力を抑えて効率的な無線タグ管理を行う無線タグ通信装置12を提供することができる。
(もっと読む)
オブジェクトロケーション
位置決め方法は、無線局(10,20)からの後方散乱信号を使用して、所定の領域内、例えば建物の部屋内の無線局の場所を見つける。その後、測定された後方散乱信号と予想信号との間の相違が見出され、その相違がオブジェクトデータベース(37)内に格納されたデータと比較されることにより、無線局(10,20)の近傍のオブジェクトが特定される。 (もっと読む)
無線局間距離測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,あるいは移動局間の相対的距離を電波で直接測定することを可能とする。
【解決手段】無線局1の送信手段103が第1の波と第2の波を無線局2に送信し,無線局2の周波数位相シフト手段202が,受信したそれぞれの波の周波数と位相をシフトして第3の波と第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信する。無線局1の周波数位相シフト手段105が,受信した第3の波と第4の波から第5の波を生成する。ここでクロック信号発生手段107が第1の波と第2の波から生成した第6の波と同期したクロック信号を生成し,このクロック信号によって動作するフィルタ108を用いて第5の波を抽出する。測定手段106が第5の波と第6の波の位相差に基づいて,無線局1と無線局2の間の電波の伝搬時間を測定する。
(もっと読む)
ロボットの走行軌道制御システム
【課題】 ロボットの移動方向を定める上で必要な情報を、ICタグから確実に取得することができる走行軌道制御システムを提供する。
【解決手段】 放射方向に向いた複数のICタグで構成される移動標識モジュールと、走行機能を備えたロボットとからなり、移動標識モジュールをロボットの移動空間内の床、天井、壁、備品、障害物等の物体に取り付けて、移動標識モジュールのICタグに記憶された情報を、いずれの方向からでもロボットが読み取ってロボットが取得した情報に基づいて自律移動するようにする。
(もっと読む)
距離指示システムおよび方法
距離指示システムには、電磁波(CWV)を送出するトランシーバ(100)と、該トランシーバとの間に距離(DST)を有し前記電磁波を受信するトランスポンダ(400)とが含まれる。前記トランスポンダは、前記トランシーバと該トランスポンダの間の距離に応じて、前記電磁波に変調を誘導するよう構成する。さらに、方法(700)を開示する。 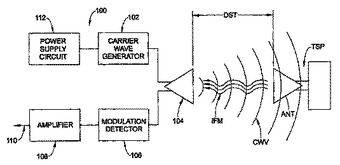 (もっと読む)
(もっと読む)
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
位置測定システムおよび位置測定方法
【課題】 人の足の位置を正確に測定することができるシステムであって、さらに体の向きを推測することにより、装置の消費電力を低く抑えることができる位置測定システムおよび位置測定方法を提供する。
【解決手段】 舞台面上1で、人111が右足にID発信靴右21を、左足にID発信靴左22を装着する。舞台面下2には電波送受信装置31および制御表示装置51が設置され、電波送受信装置31が舞台面上1に向けて電波を発信する。ID発信靴右21およびID発信靴左22が電波を受信し、それぞれのID情報を電波送受信装置31に送信する。電波送受信装置31はID情報と電波送受信装置の位置情報を制御表示装置51に送信する。制御表示装置5は舞台面が表示された画面上に人111の位置と向きを表示する。これを時系列的に繰り返すことにより、舞台上の人の位置と動きを画面上で確認することができる。
(もっと読む)
情報入力方法及び情報入力装置
【課題】対象物の3次元空間における位置情報並びに物性情報を検出して、少なくとも1つのポイントの位置情報または変位情報を検出して、電子機器などの機器に対して、たとえ複数の高精度なデータであっても、その情報入力を行うことができる技術である。
【解決手段】電磁波を発信する電磁波発信手段10からの電磁波に対して、一つ以上の対象物によって反射波が生成され、反射波が電磁波受信手段20で受信される。信号処理手段30で、受信した電磁波の信号に基づき、反射波を生成した対象物の3次元空間における位置情報を算出すると共に対象物をそれと同定する物性情報を検出し、こうして検出した複数の情報に基づき入力信号を一つ以上生成して、入力信号を機器に対して提供する。
(もっと読む)
後方散乱に基くトランスポンダの位置を測定する方法
本発明は、後方散乱に基くトランスポンダの位置を測定する方法に関する。本発明に寄れば、この方法は、基地局(BS1)により不変調搬送波信号(TS)を送信し、トランスポンダ(TR1)が基地局(BS)の応答範囲へ入る時、基地局(BS1)から送信される搬送波信号(TS)の位相変調及び後方散乱により発生される位置測定信号(OS)を、トランスポンダ(TR1)により送信し、位置測定信号(OS)に基いてトランスポンダ(TR1)の位置を測定する段階を含んでいる。例えば物品経済組織における使用。 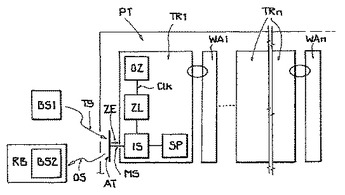 (もっと読む)
(もっと読む)
侵入・障害物検出装置及び無給電応答装置
【課題】侵入・障害物の誤認識を減少させ、低消費電力を可能とする検出装置を提供する。
【解決手段】本検出装置は、検知装置と応答装置とを有し、上記応答装置は、検知装置から受信した電波の周波数のうち特定の周波数以外の周波数をフィルタリングするフィルタと、フィルタを通過した特定の周波数の電波を増幅することなく検知装置に対して送信するアンテナとを有する。また、上記検知装置は、基準となる周波数及び特定の周波数を含む複数の周波数の電波をアンテナから応答装置に対して送信させる発信手段と、特定の周波数の電波の受信の有無と基準となる周波数の電波の受信の有無とに基づき侵入又は障害物の有無を判断する判断手段とを有する。応答装置は増幅することなく特定の周波数の電波を送信するため、消費電力を抑えることができ、無給電でも可能である。さらに、検知装置は、ほとんどのケースを取り扱うことができる。
(もっと読む)
測距システム、及び測距方法
【課題】 距離測定の精度を向上させることができるRTT方式の測距システム、及びこのような測距システムに利用される測距方法を提供する。
【解決手段】 無線信号を互いに送受信するアクセス端末と送受信端末とを備えた測距システムにおいて、応答信号の送信を要求する要求信号を送信し、要求信号が送信されてから応答信号が受信されるまでの時間を測定し、その測定された時間に基づき送受信端末までの距離を算出するアクセス端末と、アンテナ301により受信された無線信号から中間周波数信号を生成するRFIF変換部304と、その中間周波数信号の信号レベルを検出する受信信号強度計測部307と、その検出された信号レベルに基づいて応答信号をアンテナ301から送信する応答送信制御部312とを備えた。
(もっと読む)
測距システム,送信端末,受信端末,測距方法,およびコンピュータプログラム
【課題】 マルチキャリア伝送方式において測距の誤差を軽減することが可能な,測距システム送信端末,受信端末,測距方法,およびコンピュータプログラムを提供する。
【解決手段】 上記測距システム送信端末,受信端末,測距方法,およびコンピュータプログラムのうち,マルチキャリア伝送方式における端末間の距離を測定する測距システムは,パケットの送信時及び/又は受信時のデータが高速離散フーリエ変換され,さらに所定処理後の周波数領域のデータに対して,スペクトル推定アルゴリズムを適用することで,インパルスレスポンスを取得する周波数領域データ処理部(212)とを備えている。
(もっと読む)
航空機騒音データ分析処理方法
【課題】航空機騒音のデータ分析において、騒音を自動測定するとともにかぶり音の除去を効果的に行う方法を提供する。
【解決手段】任意の日の任意の測定局の騒音データを騒音レベル波形の大きい方から順にソートして、最も大きい騒音レベル波形から表示装置に表示、及び/又は、音響再生装置で再生させると共に、WECPNL値又はLAeq等の値の騒音評価値に一定の寄与率を設定して乗じた数値以上の騒音レベル波形のみをオペレータが目視して航空機騒音以外の騒音を判断して削除する航空機騒音データの分析処理方法。
(もっと読む)
監視システム及び監視方法
【課題】
高齢者介護等で利用可能な監視システムを安価で簡単な装置により実現するとともに、操作が容易で実用性の高いシステムを提供する。
【解決手段】
携帯可能で且つ特定のタグIDを選択して電波信号を送受信する親機1を所定位置に設置するとともに、携帯可能で且つ親機1から受信した電波信号に応じて電波信号(応答信号)を送受信する子機2を監視対象物に取付け、監視モードにより子機2からの電波信号の受信状態を表示又は音響出力することによって、所定領域内への監視対象物の進入を監視し、捜索モードにおいて親機1を移動させつつ、監視モードにおける通常時の電波強度よりも強い電波強度から段階的に電波強度を弱くしていくことにより監視対象物を捜索する。
(もっと読む)
無線タグの位置推定システム
【構成】無線タグの位置推定システムは、所定空間に配置された複数の無線タグ読取機14を含む。この所定空間に配置された読取機14による検出に基づいて、その検出時刻における所定空間内の無線タグの位置が推定される。その位置の推定された無線タグを目標として移動型ロボット16の移動が制御させる。移動型ロボット16には無線タグ読取機18が設けられている。この読取機18によって目標とされた無線タグが検出されたとき、読取機18による検出に基づいて、当該検出時刻における当該無線タグの推定位置座標が算出されて記録される。
【効果】無線タグの位置をより正確に推定することができる。
(もっと読む)
ICタグリーダ位置特定装置およびICタグリーダ位置特定方法
【目的】本発明は、複数のICタグをもとに位置を特定するICタグリーダ位置特定装置およびICタグリーダ位置特定方法に関し、空間内に複数の位置情報等を書き込んだICタグを配置することで、移動するリーダの位置およびICタグから読み取った情報(商品情報、場所情報などの情報)を簡易かつ高精度に表示等することを目的とする。
【構成】 位置情報を書き込んで空間内の該当位置に配置する複数のICタグと、ICタグから情報を読み取るリーダと、リーダによって信号強度を可変して送信しICタグから情報を読み出させたときあるいは読み取れなくなったときの信号強度からICタグまでの距離を算出する手段と、算出した複数のICタグまでの距離および複数のICタグからそれぞれ読み取った位置情報をもとにリーダの位置を算出する手段とを備える。
(もっと読む)
二次監視レーダ装置とその質問送信方法
【課題】 SSRモードSの質問送信方式において、余分な質問を減少させ、他の質問を送信できる時間を確保する。
【解決手段】 質問送信の予測角度範囲をアンテナビーム幅と比較し(S1,S2)、質問を送信する予測角度範囲がアンテナビーム幅より狭い場合には、毎ロールコール期間、質問を送信する(S3)。これに対し、質問を送信する予測角度範囲がアンテナビーム幅より広い場合には、応答が受信できるまで、質問を送信する期間、質問を送信しない期間をそれぞれ設けるようにし(S4,S5)、応答が受信できた後、毎ロールコール期間、質問の送信を行う(受信エラーやダウンリンクが発生した場合も含む)(S6)。このように質問送信方式を変更した結果、応答が返る可能性の少ない方位への質問の送信を減少させることができるため、この時間を他の目標に対するトランザクションのスケジュールに使用することができるようになる。
(もっと読む)
301 - 320 / 359
[ Back to top ]