
Fターム[5J070BG27]の内容
レーダ方式及びその細部 (42,132) | 表示 (572) | 補助情報表示 (155) | マップ(地図) (36)
Fターム[5J070BG27]に分類される特許
1 - 20 / 36
レーダ基準方位補正装置、レーダ装置、レーダ基準方位補正プログラム、及びレーダ基準方位補正方法
【課題】レーダ装置の探知方向の基準である基準方位を高精度に補正するレーダ基準方位補正装置を提供する。
【解決手段】レーダ基準方位補正装置は、相対位置取得部と、絶対位置取得部と、演算部と、補正部と、を備える。相対位置取得部は、レーダ装置(レーダアンテナ)に対する物標の相対位置を取得する。絶対位置取得部は、レーダ装置の絶対位置及び物標の絶対位置を取得する。演算部は、相対位置に基づく、レーダ装置に対する物標の方向と、絶対位置に基づく、レーダ装置に対する物標の方向と、の差である誤差角を求める。補正部は、演算部が求めた誤差角に基づいて、基準方位を補正する。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導

【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
干渉除去装置、レーダ装置、及び干渉除去方法
【課題】レーダ映像の分解能を損なわずに、干渉除去する際のメモリ使用量を削減する。
【解決手段】干渉除去装置は、スイープデータ値の数値範囲を区分した複数の級のうち、入力されるスイープデータ値に対応する級を選択する級選択部と、入力されるスイープデータ値と方位方向に隣接するスイープデータ値に対して算出されたフィルタ出力値であって複数の級のいずれかの級により方位方向の相関を示すフィルタ出力値と、級選択部が選択した級とに基づいて、方位方向の相関を示すフィルタ出力値を算出するフィルタ処理部と、フィルタ処理部が算出した入力されるスイープデータ値に対するフィルタ出力値と、予め定められたしきい値とに基づいて入力されるスイープデータ値が干渉であるか否かを判定し、干渉であると判定された場合、予め定められた抑圧値を出力し、干渉でないと判定された場合、入力されるスイープデータ値を出力する干渉抑圧部とを備える。
(もっと読む)
レーダ装置
【課題】反射波の受信信号から反射元の種類を判別可能な技術を提供すること。
【解決手段】レーダ装置の信号処理部は、反射波のパワー(受信電力)Pと、このパワーPに対応する反射波の受信時点から観測周期Tsw=Tm遡った時点で受信された反射波のパワーPbと、に基づき、パワーPbに対するパワーPの変化量Y=log(P)−log(Pb)を算出する(S310)。一方、当該レーダ装置は、判別対象とする反射元の種類毎に、レーダ波が当該種類の反射元で反射して到来する反射波から算出される変化量Yの確率分布を記憶する。そして、算出された変化量Yと、上記反射元種類毎の確率分布とから、今回算出された変化量Yに対応するレーダ波の反射元の種類を判別する。即ち、反射元種類毎に、当該変化量Yが得られる確率Prを算出し(S320)、確率Prの最も高い種類を、今回のレーダ波の反射元であると判別する(S330)。
(もっと読む)
電波発射源推定方向表示装置及び電波発射源推定方向表示方法
【課題】電波発射源による電波を受信した際に、地図上における自己の位置及び自己の位置に対する電波発射源の推定方向を容易に認識することができる電波発射源推定方向表示装置を提供する。
【解決手段】電波発射源からの電波を受信するアンテナ部と、到来方向を推定する到来方向推定処理部7と、アンテナ部の位置情報を取得するGPS受信機10と、アンテナ部の方位情報を取得する方位センサ11と、GPS受信機10により取得された位置情報に基づいてアンテナ部周辺の地図情報を取得するとともに、到来方向推定処理部7により推定された到来方向と方位センサにより取得された方位情報とに基づいてアンテナ部で受信した電波の到来方位を算出し、算出した到来方位とアンテナ部の位置とを取得した地図情報に重ね合わせて出力する地図表示処理部12と、アンテナ部で受信した電波の到来方位及びアンテナ部の位置を示した地図を表示する表示部13とを備える。
(もっと読む)
物体変位監視装置、及び物体変位監視方法
【課題】物体の変位を精度の良く監視する物体変位監視装置、及び物体変位監視方法を提供することを課題とする。
【解決手段】物体変位監視装置は、互いに高さの異なる複数の反射板に照射されたレーダの反射波に基づき生成された測定データから、互いに高さの異なる複数の反射板からの反射波による領域データを抽出し、抽出された領域データを所定の範囲ごとにグループ化し、グループ化された領域データに基づき測定対象物の変位を監視する。
(もっと読む)
偽像低減装置、レーダ装置、偽像低減方法、および偽像低減プログラム
【課題】画像処理により偽像を低減する偽像低減装置を提供する。
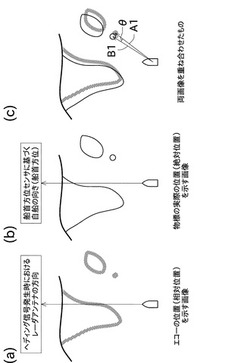
【解決手段】偽像低減処理部17は、自船に最も近く、物標と判断できる程度の高いエコーレベル(所定のしきい値以上のエコーレベル)を有するエコーの反射物(鏡)とする。偽像低減処理部17は、物標のエコー画像を細線化し、線画像に変換する。偽像低減処理部17は、このようにして得られた線画像の端点を2点抽出し、反射物をこの2点の座標で表すベクトルとして設定する。偽像低減処理部17は、自船の位置と上記端点(端点Aおよび端点B)を結ぶ直線(ラインAおよびラインB)を設定する。そして、反射物の直線とラインA、ラインBで囲まれた領域を偽像領域とする。偽像低減処理部17は、以上の処理を行った後、偽像領域内のエコーレベルを低減する(顔像輝度値を下げる)処理を行い、偽像を低減する。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】サイドローブによる偽像を抑圧することができる信号処理装置を提供する。
【解決手段】レーダ指示機3は、物標存在領域検出部21と、過去スイープ蓄積部22と、偽像抑圧部23と、を備えている。物標存在領域検出部21は、物標が存在する領域を検出する。過去スイープ蓄積部22は、方位方向に連続したレーダエコーを取得可能である。偽像抑圧部23は、方位方向に連続したレーダエコーから得られる情報に基づいて、前記レーダエコーに含まれる偽像を抑圧する処理を行うことが可能である。そして、偽像抑圧部23は、物標が存在する領域のレーダエコーに対しては、それ以外の領域のレーダエコーに対する処理とは異なる処理を行っている。
(もっと読む)
レーダ情報表示装置
【課題】投影方法を切り替えてもレーダ情報や地図情報が表示されるまでの遅延を少なくすることができるようにする。
【解決手段】レーダ情報記憶バッファ210および地図情報記憶バッファ220は、それぞれが2つの記憶バッファ211(221),212(222)と、当該記憶バッファの一方を記憶情報の読み出し状態にした場合に他方を更新情報の書き込み状態となるように切り替えるバッファ切り替え手段213(223)とを有しており、座標変換手段240と画像生成手段230による表示画像生成処理は、所定の周期で、かつ当該周期内の一定の期間に割り当てて繰り返して行い、レーダ情報記憶バッファ210および地図情報記憶バッファ220の更新情報の書き込み処理は、所定の周期内の残りの期間に割り当てて任意の時期に行う。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】受信信号の種類に応じて柔軟に信号処理を行うことが可能な信号処理装置を提供する。
【解決手段】レーダ指示機3は、受信信号取得部13と、種類識別処理部18と、種類別信号処理部20と、を備える。受信信号取得部13は、レーダアンテナ11が受信した受信信号を取得する。種類識別処理部18は、受信信号の種類を識別する。種類別信号処理部20は、受信信号を種類ごとに抽出する。また、前記種類別信号処理部20は、抽出された受信信号に対して、受信信号の種類ごとに個別の信号処理を行う。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
レーダ画像処理装置および気象レーダ装置
【課題】本発明は、雨量と、風速または風向との地理的分布をそれぞれ示す画像を生成するレーダ画像処理装置と、そのレーダ画像処理装置が搭載された気象レーダ装置に関し、多様に刻々と変化し得る所望の地域の雨量・風速・風向を地理的に対応づけて容易に観測できることを目的とする。
【解決手段】気象レーダ装置が与える雨量の地理的分布を示す第一の画像と、前記気象レーダ装置が与える風速または風向の地理的分布を示す第二の画像とにそれぞれ乗じられるべき2つの重みの設定および可変を実現する重み設定手段と、前記第一の画像および前記第二の画像と前記2つの重みとの積和として、前記雨量および前記風速、または前記雨量および前記風向の地理的分布を示す合成画像を生成する画像合成手段とを備える。
(もっと読む)
レーダ信号処理装置
【課題】本発明は、気象レーダの観測局から引き渡された観測データに基づいて3次元における雲の分布を求めるレーダ信号処理装置に関し、雷監視システムから通知された情報を活用することにより、雲放電や対地放電が発生した地点や空間を的確に識別できることを目的とする。
【解決手段】雷監視システムから与えられ、かつ雲放電が発生した位置を示す雷監視情報を取得する雷情報取得手段と、気象レーダの観測局から引き渡され、かつ地理的な位置毎に前記観測局によって計測されたエコー強度の鉛直方向における分布に、前記雷監視情報で示される位置におけるエコーの頂部を印す雷マーク手段とを備える。
(もっと読む)
地盤変化の調査方法
【課題】より正確な調査結果が得られる地盤変化の調査方法を提供する。
【解決手段】本発明は、地盤上の複数の調査ポイントPSiの座標の生の変化量ΔBX(PSi)、及び、地盤上の少なくとも1の参照ポイントPRiの座標の生の変化量ΔBX(PRi)を提供する工程と、参照ポイントの座標の真の変化量ΔRX(PRi)を決定する工程S110と、調査ポイントの座標の生の変化量、参照ポイントの座標の生の変化量、及び、参照ポイントの座標の真の変化量に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)を算出する工程S130と、を備えている。
(もっと読む)
移動軌跡算出装置および移動軌跡算出方法
【課題】少ない計算量かつ高精度で、移動体の軌跡を算出する。
【解決手段】本発明の移動軌跡算出装置は、観測エリアを観測して得た、観測時刻と複数の観測値とを含む複数のセンサデータを記憶する手段と、前記観測エリアを分割した複数の区間における隣接区間同士毎に一方から他方の区間およびこの逆方向の移動コストを記憶する手段と、直前の観測時刻までに特定された第1〜第Lの観測値系列毎に、前記観測値系列の最新の観測値を含む区間からの合計移動コストが所定コスト以下である次の時刻の観測値群を第1〜第Lの観測値群として選択する手段と、前記第1〜第Lの観測値系列に対して第1〜第Lの観測値群からそれぞれ異なる1つの第1〜第Lの観測値を選択して割り当てる複数のパターンを生成する手段と、前記第1〜第Lの観測値系列の前記パターンの各観測値に対する尤度の合計をパターン毎に計算する手段と、尤度の合計が最も高いパターンを選択する手段とを備える。
(もっと読む)
追尾処理装置
【課題】追尾処理装置において、予測経路上の等高線本数に基づく簡便な方法で予測位置への移動可否を判定する。
【解決手段】開示される追尾処理装置は、観測員用端末装置等1から提供される目標の種類と位置情報をもとに、目標の位置情報と航跡の予測位置とを位置相関する相関処理部2と、現在の平滑化位置・平滑化速度を算出する平滑化処理部4と、次の目標の位置情報入力時に得られる位置を予測する予測処理部5と、監視区域の地勢情報を提供する地勢情報発生部6と、目標が予測された位置へ到達可能か否かを目標の種類ごとに判定する予測判定部8と、判定結果が到達不可能の場合に予測の変更を行う予測変更部9とを有する追尾処理装置において、地勢情報発生部から提供される監視対象領域の等高線情報に基づいて、目標の現在位置と予測位置との間の等高線密度により傾斜の度合いを算定し、算定結果に基づいて、目標が当該予測位置に到達し得るか否かを判定する。
(もっと読む)
制御装置
【課題】駐車スペースの形状を算出するための処理負担を軽減できる制御装置を提供する。
【解決手段】制御装置は、車両1を基準として、所定角度毎(5度毎)に放射状に延びる線上に位置すると共に駐車スペース200を区画する各壁200b〜200dまでの距離を距離センサ26aにより検出し、その検出結果から駐車スペース200の形状を算出するので、カメラにより入力される画像を1画素ずつ解析して駐車スペース200の形状を算出する場合に比べて、制御装置のCPUの処理負担を軽減できる。
(もっと読む)
レーダ監視装置
【課題】レーダ装置による設備への悪影響の発生を抑制する「レーダ監視装置」を提供する。
【解決手段】予めレーダ波の悪影響を受ける設備の周辺に設定したレーダ禁止エリア内に、自動車が進入したならば、レーダ波の射出を停止し、音声出力装置7を介してスピーカ8に「レーダ監視を停止しました。」といった音声案内を出力する。また、レーダ禁止エリア内に、自動車が位置する期間中、レーダの停止中を表現したアイコン312を表示すると共に、地図画像300上に、レーダ禁止エリアが設定されている施設を表すマーク321と、レーダ禁止エリアの範囲322とを表示する(b)。
(もっと読む)
目標物体の検出および追尾を行うシステムおよび方法
【課題】目標物体の高度の計算を含む、目標物体の検出および追尾を行うシステムならびに方法を提供する。
【解決手段】受信機によって受信された信号の処理中に、このシステムは、送信機によってブロードキャストされた信号により形成される干渉効果パターンによって変更された信号から、目標物体の高度を計算するか、または、3以上の送信機に関連付けられた幾何学形状の計算およびそれらの形状の交点を求めることから、目標物体の高度を選択的に計算する。
(もっと読む)
物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法
【課題】様々な物体を高精度に認識することのできる物体検知装置、物体検知方法、またかかる物体検知を用いた周辺監視装置および運転支援システムを提供すること。
【解決手段】物体検知波部10は、カメラ32が撮影した画像に対する画像認識によって物体候補領域を識別し、当該領域に存在する可能性のある物体の種別、方向、距離、角度に基づいてレーダ検知の閾値を設定した閾値マップを作成する。検知処理部16は、レーダ31の反射波強度と閾値マップに示された閾値とを比較して、物体の存在を検知する。
(もっと読む)
1 - 20 / 36
[ Back to top ]