
Fターム[5J083AD13]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 物体の形状 (137)
Fターム[5J083AD13]の下位に属するFターム
路面の状況 (4)
Fターム[5J083AD13]に分類される特許
21 - 40 / 133
水中映像取得装置及び取得方法
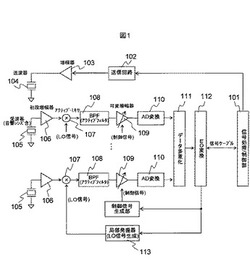
【課題】受信信号のデータ量を低減し、電子回路規模の削減及び装置の小型化を可能とし、ノイズ及び高調波成分を抑制して、明瞭な水中音響画像を得る。
【解決手段】送波器104に入力する電気信号の周波数を変更して送波器104から放射される音波の送波ビームを水平方向または垂直方向にステアリングし、目標からの反射音波を収束させる音響レンズを受波器の前面に備える。受波器は、送波器104のステアリング方向と直角な方向に分割された複数の受波素子105により構成され、受信された目標からの反射信号(受信信号)のそれぞれと、送信周波数に合わせて周波数設定された局部発振器信号との2つの信号を掛け合わせることにより、各受波素子からの受信信号をある一定の周波数にダウンコンバートした受信信号とする複数のアクティブ・ミキサ107と、周波数変換された受信信号から水中映像を生成する信号処理/制御手段101とを備える。
(もっと読む)
超音波センサとその製造方法

【課題】ばらばらの圧電素子を1つ1つ手で並べて前面金属板にロウ付けする従来法と比較して、加工精度や整列性が向上し、圧電素子を小型化し密に配列することができる超音波センサを提供する。
【解決手段】バッキング材で形成されたブロック体3と、圧電材料で形成され所定の厚みを有し、ブロック体3の前面に接合される圧電体7と、を備える。ブロック体3に接合された状態の圧電体7にスリットが入れられることで、該圧電体7が複数の圧電素子7aに分離されているとともに、ブロック体3には、それぞれ複数の圧電素子7aへの導通路となる複数の貫通孔15が形成されており、これにより、複数の圧電素子7aは互いに独立して機能する。
(もっと読む)
駐車空間検出装置
【課題】水平広角度ソナーを用いても駐車空間の検出精度を高めることができる駐車空間検出装置を提供する。
【解決手段】駐車空間検出装置は、12番の反射波形4wに対応する角検出位置S1を駐車空間Sの走行側の左角の検出位置に設定し、37番の反射波形4wに対応する角検出位置S2を駐車空間Sの走行側の右角の検出位置に設定する。そして、駐車空間検出装置は、双方の角検出位置S1、S2に基づいて駐車空間Sの位置を想定する。
(もっと読む)
測定装置
【課題】適応型信号処理と空間平均法を使用した画像化を行う測定装置において、高速な信号処理を可能とする。
【解決手段】測定装置は、被検体内を伝播してきた超音波を複数の超音波変換素子で受信することにより得られたアナログ信号を用いて被検体内の画像データを生成する測定装置であって、前記アナログ信号をデジタル信号に変換する信号変換部と、前記デジタル信号に適応型信号処理を行い、画像情報を生成する演算手段と、前記信号変換部から前記演算手段に転送される前記デジタル信号のデータ量を削減するデータ間引き手段と、を有する。
(もっと読む)
超音波式水中映像取得装置
【課題】潜水士によらずに安全、高効率、水中の濁度に依存しない水中視認することができる超音波式水中映像取得装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、前記対象物からの反射波の情報を三次元測定結果として処理する処理手段と、前記三次元測定結果を映像として表示する表示部を備える超音波式水中映像取得装置において、前記映像を任意の視点から表示することができるように、回転自在に表示することを可能とする映像処理手段を備える。
(もっと読む)
水中映像取得装置
【課題】送波器に入力する電気信号の周波数を変更することによって送波ビームのステアリングを可能とする周波数掃引方式を適用し、目標からの反射音波を収束させる音響レンズを受波器の前面に備えた水中映像取得装置において、取得した音響画像が必ずしも明瞭ではなかった。また、音響画像の虚像やノイズの原因となる、副極、グレーティングローブの抑制について、水中映像取得装置の電子回路規模の小型化を考慮した設計がなされてなかった。
【解決手段】音響変換素子から送波された各超音波全てが合成される時間Lsinθi/ν以上のパルス幅を持った任意の周波数の送信信号を単数または複数個連結する水中映像取得装置により、達成できる。
(もっと読む)
水中探知装置及び水中探知画像表示方法
【課題】魚単体の遊泳状況を観測容易にする。
【解決手段】水中探知装置は、水中に送波され、魚で反射した受信信号から単体魚及びその位置を周期的に検出する検出手段(5,6)と、周期的に検出された単体魚及びその位置の情報から、同一の単体魚を関連付ける連結処理部71と、検出された単体魚の受信信号から魚体長を算出する魚体長算出部75と、単体魚の遊泳ベクトルを算出する遊泳ベクトル算出部72と、連結された単体魚について、魚体長に対応した計量マーク92a、及び当該単体魚の遊泳ベクトルに対応した変位マーク92bを対応付け、表示部9に表示される2次元座標上の当該単体魚の検出位置に表示する表示制御部8とを備える。
(もっと読む)
形状算出装置
【課題】利用者の身近にある空間の形状に関する情報を利用者に提供することである。
【解決手段】利用者により操作部14が操作されると、それを契機として、距離算出部152は、スピーカ12により検出音が放音されてから、反射面からの検出音の反射音がマイクロホン13により収音されるまでの期間の長さに基づいて自装置から反射面までの距離を算出する。方向特定部155は、加速度センサ20によって検出された加速度に応じて自形状算出装置10が検出音を放音する方向を特定し、その方位角及び仰角を特定する。形状算出部154は、反射面の複数の位置について、自装置からの距離、方位角及び仰角をそれぞれ求めて、これらの結果から反射面の形状を模した画像等の、空間の形状に関する情報を利用者に提示する。
(もっと読む)
超音波画像化装置
【課題】広指向角,狭指向角の送信超音波のいずれにおいても効率的な画像の生成を可能とする超音波画像化装置を提供する。
【解決手段】超音波画像化装置が,複数の第1の圧電素子から送信される超音波の合成波が,所定の仮想送信点から発信される超音波と対応するように,前記複数の第1の圧電素子それぞれの発信タイミングを制御する発信制御部と,前記複数の第1の圧電素子から送信され,検査対象物で反射され,複数の第2の圧電素子で受信される超音波エコーに対応する,電気信号を検出する信号検出回路と,前記電気信号に基づき,前記検査対象物に対応する画像を生成する生成部と,を具備する。
(もっと読む)
超音波撮像装置
【課題】アンテナを撮像対象物体に正確に向けるとともに、高い分解能で撮像する超音波撮像装置を提供すること。
【解決手段】パラボラ状の曲面上に配置され、供給される駆動信号に応答して超音波を送信し、超音波を受信して電気信号を発生する圧電素子を有する超音波プローブを有するアンテナ本体110と、各超音波プローブの向きをそれぞれ変更する姿勢変更部140と、開口合成のために使用される第1周波数で送受信するとともに2次元配置された複数の主超音波プローブ111と、第1周波数よりも低い第2周波数で送受信する補助超音波プローブ112a〜112dと、主超音波プローブ111の圧電素子が発生した各電気信号を用いて、超音波画像を生成する画像生成部226とを備えている。
(もっと読む)
超音波診断装置用プローブ及びその製造方法
【課題】製造が容易であり、圧電層と印刷回路基板との間の接合不良による性能低下を防止できるように構造を改善した超音波診断装置用プローブ及びその製造方法を提供する。
【解決手段】吸音体110,111を備える吸音層と、互いに離隔して形成される複数の電極を備えており、前記各吸音体の間に挟まれて接合される第1連結部120と、前記複数の電極と電気的に連結されるように配置される圧電体とを備えた超音波診断装置用プローブを構成する。
(もっと読む)
水底下物体の探査類別方法及び装置
【課題】散乱波のレベルが高く類別に適した周波数を簡易に選定でき、水底下物体を精度よく類別可能な水底下物体の探査類別方法及び装置を提供する。
【解決手段】周回中に送波器3から所定の帯域で周波数を変化させた音波を送波すると共に、受波器4でその散乱波を受波して、水底下物体に対する方位角度を縦軸、周波数を横軸とした周波数散乱レベルの分布を作成し、作成した周波数散乱レベルの分布を基に、散乱波の強度が高く類別に適した周波数を選定すると共に、選定した周波数における散乱波の方向レベルパターンを抽出し、その散乱波の方向レベルパターンを予め蓄積したデータベースと照合することで、水底下物体の類別を行う。
(もっと読む)
合成開口ソーナー
【課題】合成開口ソーナーにおいて海底堆積層に埋没した物体を正確に画像化するための、信号処理装置を提供する。
【解決手段】海底堆積層の音波伝搬時間と、堆積層がない場合の音波伝搬時間との時間差を、ソーナー受信信号のリサンプリングもしくは合成開口処理におけるカーバチャ形状の補正として与えることで、海底堆積層が存在することによる合成開口処理後画像中の対象物の輝度・コントラスト・位置精度などの描出性能を向上させる。さらに、前記手段をDPCやMEAなどの動揺修正手段と組み合わせることで、船体の動揺がある場合にも埋没物を精度良く描出する。
(もっと読む)
入力装置及び電子機器
【課題】比較的近距離に存在する比較的小さな検出対象の3次元的な位置、形状、速度を正確に検出することができ、検出対象の検出結果に対応した入力を行うことができる入力装置と、その入力装置を備えた電子機器を提供する。
【解決手段】超音波を発信して反射された超音波を受信する超音波センサーユニット1Aを備え、超音波センサーユニット1Aから発信された超音波と、検出対象により反射され超音波センサーユニット1Aにより受信された超音波と、に基づいて検出対象の位置、形状及び速度を算出する制御演算部を備え、超音波センサーユニット1Aは、複数の開口部11aが形成された基部11と、基部11に設けられ開口部11aを閉塞する振動板と、開口部11aの各々に対応して振動板に設けられた圧電体と、を有することを特徴とする。
(もっと読む)
超音波計測装置
【課題】船体の三次元位置及びロール,ピッチ,ヨウの6条件を把握することなく、高速運航下においても、海底形状を連続計測することができる超音波計測装置を提供する。
【解決手段】方位方向に周波数の異なる超音波を送波する送波器と、前記送波器から送波された超音波の対象物からの反射波を受波する受波器と、前記対象物からの反射波の情報を三次元計測結果として処理する処理手段とを備える超音波計測装置において、前記三次元計測結果を順次連結させる連結手段を含む。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラム
【課題】高い精度で位相誤差を検出、補正することを可能とする合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラムを提供する。
【解決手段】ストリップマップモードの合成開口ソーナーの位相誤差補正に関し、DPCA(Displaced Phase Center Antenna)等により空間的に位相中心をオーバーラップさせた送受信による受信信号から合成開口画像を生成する第1のステップと、合成開口画像の高いレベルのレンジビンのアジマスデータに対応する空間サンプルから位相誤差勾配の推定値を生成する第2のステップと、前記位相誤差勾配の推定値に基づいて前記空間サンプルの位相を補正する第3のステップと、を含むことを特徴とする。
(もっと読む)
音波撮像装置
【課題】海中での音波撮像装置において、海底堆積層が存在することによって生じる音波画像の位置のズレ・低いコントラスト(ぼやけ)・輪郭の歪み解消し、高精細・高解像度の音波画像を得る。
【解決手段】ソーナー送受信部300で受信した信号から底質計算部302で海底堆積層の物理パラメータを推定し、推定された物理パラメータから画像補償計算部304で堆積層の補正用データを生成する。補償画像処理部306は、この補正用データとソーナー受信信号307を用いて、堆積層の音波伝搬に起因する受信信号もしくは音波画像のズレや歪みが補正されたソーナー画像を生成する。さらに、対照情報生成部において、補正された音波画像と基準画像310を比較し、その残渣分をさらなる補正にフィードバックして補正の高精度化を行う。
(もっと読む)
超音波探知装置
【課題】振動子の数が少なくても、グレーティングローブによる偽像を除去して探知対象物の検出精度を向上させることが可能な超音波探知装置を提供する。
【解決手段】受信ビーム信号形成部9a,9bで形成された2つの受信ビーム信号の位相差を、位相差算出部11で走査角度ごとに算出し、メインローブ受信信号検出部12は、位相差算出部11で算出された位相差の変化態様に基づいて、各走査角度における受信ビーム信号がメインローブで受信された信号かグレーティングローブで受信された信号かを判定し、メインローブで受信された信号に基づく探知対象物の画像を表示し、グレーティングローブで受信された信号に基づく探知対象物の画像を表示しないように制御する。
(もっと読む)
超音波探知装置
【課題】サイドローブによる偽像が表示されるのを抑制しながら、S/N比が低下するのを抑制することが可能な超音波探知装置を提供する。
【解決手段】水中探知装置50は、探知対象物で反射したエコーを含む受信信号を受信する複数の振動子1aと、所定の振動子1bが受信する受信信号を基準にして、所定の振動子1b以外の振動子1cが受信する受信信号を整相することにより、1つの受信ビーム信号を探知範囲内の走査角度毎に形成する受信ビーム信号形成部7と、受信ビーム信号の位相を走査角度毎に算出する位相算出部8と、位相の変化態様に基づいて各走査角度における受信信号がメインローブにより受信されたか否かを判定するとともに、メインローブにより受信されたと判定された受信信号のみを抽出するメインローブ受信信号抽出部9とを備えている。
(もっと読む)
21 - 40 / 133
[ Back to top ]