
Fターム[5J084CA69]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | スイッチング回路 (108)
Fターム[5J084CA69]に分類される特許
21 - 40 / 108
マルチ信号処理装置、測距装置、及びマルチ測距システム
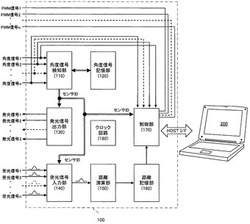
【課題】高分解能の測距精度を確保しながらも極めて安価に複数台の測距装置をロボット等に組み込むことが可能なマルチ信号処理装置等を提供する。
【解決手段】
複数の測距装置1と接続され、各測距装置1から入力される発光要求信号のエッジを検知すると対応する測距装置の発光部を駆動する発光信号を出力する発光制御部110,120,130と、発光制御した測距装置の受光部から受光信号を入力する入力処理部140と、入力処理した受光信号に基づいて被測定物迄の距離を算出する演算処理部150と、各処理部により実行される一連の処理を、任意の測距装置から入力される走査角度信号の一周期内で、各測距装置に対して順番に実行させるジョブ管理部110,120とを備えている。
(もっと読む)
時間計測装置および距離計測装置

【課題】簡易な構成で高精度の時間計測を行うことができる時間計測装置を提供する。
【解決手段】時間計測装置10は、定電流源11,制御部12,演算部13,容量素子C1〜C3,抵抗器R,スイッチSW0〜SW3,SW11〜SW13を備える。制御部12は、発光タイミング信号および受光タイミング信号を入力し、tacoff信号,tac1信号,tac2信号,tac3信号,reset1信号,reset2信号,reset3信号を生成して各スイッチへ与え、スイッチの開閉動作を制御する。演算部13は、スイッチSW1と容量素子C1との接続点の電位Vout1、スイッチSW2と容量素子C2との接続点の電位Vout2、および、スイッチSW3と容量素子C3との接続点の電位Vout3を入力して、電位Vout1〜Vout3に基づいて演算を行う。
(もっと読む)
時間計測装置および距離計測装置
【課題】アレイ化した場合であっても簡易な構成で高精度の時間計測を行うことができる時間計測装置を提供する。
【解決手段】時間計測装置10は、定電流源11,制御部12,演算部13,容量素子C1〜C3,抵抗器R,スイッチSW0〜SW3,SW11〜SW13を備え、アレイ化されている。制御部12は、発光タイミング信号および受光タイミング信号を入力し、tacoff信号,tac1信号,tac2信号,tac3信号,reset1信号,reset2信号,reset3信号を生成して各スイッチへ与え、スイッチの開閉動作を制御する。演算部13は、スイッチSW1と容量素子C1との接続点の電位Vout1、スイッチSW2と容量素子C2との接続点の電位Vout2、および、スイッチSW3と容量素子C3との接続点の電位Vout3を入力して、電位Vout1〜Vout3に基づいて演算を行う。
(もっと読む)
光波距離測定装置
【課題】測定対象物の画像データと画素毎の距離データが得られる様にした光波距離測定装置を提供する。
【解決手段】測距光を変調して測定対象物に照射する投光部1と、測定対象物からの反射測距光を受光する受光部6と、受光信号を記憶する信号処理部7と、前記受光部及び前記信号処理部を制御して受光信号を取得する信号処理制御9と、受光信号に基づき測定対象物迄の距離を演算する演算処理器8とを有し、前記受光部は、所定の配列で配置された複数の画素11と、各画素からの受光信号を蓄積し、1周期を所定数分割した内の1分割分の受光量を検出し、検出結果を時系列に出力する出力部15とを有し、前記信号処理制御部は、一周波毎に受光量を検出する分割部分の位置を順次変更し、前記演算処理器は、少なくとも1周期分の検出結果に基づき一周波分の波形を演算すると共に、照射した前記測距光に対する前記波形の位相差を求め、該位相差より距離を演算する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】ある期間に観測される干渉波形の数を基に物理量を算出するバッチ処理方式と個々の干渉波形の周期を基に物理量を算出する逐次処理方式とを適宜切り替え可能にする。
【解決手段】物理量センサは、物理量の算出をバッチ処理方式で行う第1の演算部9と、物理量の算出を逐次処理方式で行う第2の演算部10と、信号抽出部8が計測した個々の干渉波形の周期から干渉波形の単位時間当たりの数を算出し、この数の変化の周波数をfsig、半導体レーザ1の発振波長変調の搬送波の周波数をfcarとしたとき、fsig>fcar/A(Aは1より大きい所定の定数)が成立する場合、第2の演算部10の算出結果を採用すべきと判定し、fsig>fcar/Aが成立しない場合、第1の演算部9の算出結果を採用すべきと判定する切替部12とを有する。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】赤外光を用いて位置検出を行なう方式を採用した場合でも、赤外線通信が原因で対象物体の位置を誤検出することを防止することができる光学式位置装置および位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10および位置検出機能付き表示装置100では、発光素子12から出射された位置検出光L2によって検出領域10Rに強度分布を形成し、対象物体Obで反射した位置検出光L2を光検出器30で受光して対象物体Obの位置を検出する。光学式位置検出装置10および位置検出機能付き表示装置100は、光検出器30での受光結果に赤外線通信信号L5が含まれているか否かを検出する通信信号検出部55を備えており、位置検出用指令部58は、通信信号検出部55により赤外線通信信号が検出されている期間中、位置検出用光源部11および位置検出部51による位置検出動作の停止を指令する。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12上に絶縁体を介して形成された第1電極16aを有する1つの第1MOSダイオード18aと、半導体基体12上に絶縁体を介して形成された第2電極16bを有する複数の第2MOSダイオード18bとを有する。第1MOSダイオード18aの第1電極16aは、上面から見たとき、1つの電極部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、第2MOSダイオード18bの各第2電極16bは、上面から見たとき、第1電極16aとは分離され、且つ、第1電極16aにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12に形成された1つの埋め込みフォトダイオードBPDと、半導体基体12上に絶縁体を介して形成された電極16を有する複数のMOSダイオード18とを有する。埋め込みフォトダイオードBPDは、上面から見たとき、1つの部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、MOSダイオード18の各電極16は、上面から見たとき、埋め込みフォトダイオードBPDにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
物体検知センサ
【課題】簡単に検知状態とすることができる物体検知センサを提供する。
【解決手段】本発明に係る物体検知センサ1Aは、床面Fからの反射波を検出する検出部5と、検出部5が検出した反射波に基づいて床面Fとの間に物体が存在しているか否か判定し、当該判定結果に応じた物体検知信号を出力する検知制御部8と、外部からの指令信号を受信するとともに、当該指令信号に基づいて検知モードを通常検知モードと強制検知モードとに切り替えるためのモード切替信号を出力する受信部6と、通常検知モードにおいては物体検知信号に基づいて物体が存在しているか否かを示すセンサ出力信号を出力し、強制検知モードにおいては物体検知信号とは無関係に物体が存在していることを示すセンサ出力信号を出力する出力部9と、を備えている。
(もっと読む)
レーザ測距装置
【課題】パルスのレーザ光を送信して目標物で反射したレーザ光を受信し、送信から受信までの経過時間から目標物までの距離を算出するレーザ測距装置において、より効率的な測距処理を可能にしたレーザ測距装置を提供する。
【解決手段】パルス毎に受信信号の最大ピーク値と送信から最大ピーク値に達するまでの時間をサンプリング周期の周期数として測定し、複数回の受信信号の最大ピーク値をそれぞれカウントした周期数が同じ数同士で積分し、最大の積算値が存在する周期数を導出し、この導出した周期数に相当する時間から目標物までの距離を演算する。最大ピーク値及び周期数の測定には高速に応答可能なアナログ回路を用いる。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
光学センサシステムにおいて光源に流れる電流の上昇時間を早める高電圧源
光学センサシステムにおいて、高電圧源回路により光源が駆動される。高電圧源により、高電圧出力が、光源のオン期間の開始期間に光源へと供給され、光源に流れる電流の上昇時間が減じられる。光源オン期間の開始の後、高電圧出力が、回路から非接続とされ、電流源が、電流出力を光源へと供給し、その余の光源オン期間の期間、光源を駆動する。  (もっと読む)
(もっと読む)
光センサシステム用の二重電圧電流制御フィードバックループ
光センサシステム用の二重電圧電流制御フィードバックループが提供される。電源が直流(DC)安定化電圧出力を提供する。電流源が直流(DC)安定化電圧出力を受け、光源にスイッチド電流を提供する。電流源が光源を駆動する際は光源への電流を表す電流フィードバックがフィードバックパス上で電源に提供される。電流源が光源を駆動しない場合は直流(DC)安定化電圧出力を表す電圧フィードバックがフィードバックパス上で電源に提供される。  (もっと読む)
(もっと読む)
光学センサシステムにおいて光源を駆動する電流源
光学センサシステムにおいて光源を駆動する電流源回路が開示されている。電流源は、抵抗器に直列接続されたインダクタ、及びインダクタと抵抗器に対して並列結合されたダイオードを含む。電流源は、調整された直流(DC)電圧を受け、スイッチが閉じているときにインダクタを通じて電流を光源へ供給し、スイッチが開いているとき、インダクタを通じた電流をダイオードへ流すように構成されている。  (もっと読む)
(もっと読む)
レーザードップラー速度計
【課題】被検体の速度を安定して精度良く測定するレーザードップラー速度計を提供する。
【解決手段】レーザードップラー速度計100は、被検体Dの表面で干渉及び反射された散乱光を受光する複数の受光素子120を含む光学センサ110と信号処理ユニット130とを有し、信号処理ユニット130は、複数の受光素子120の出力のうち信号レベルが許容値以上であるかどうかを判断することによってその一つ選択するための選択信号を生成するCPU138と、選択信号に基づいて信号S1を信号S2に切り替える選択切換部146と、信号S1と信号S2の位相差に対応する時間差だけ信号S2の立ち上がり及び立ち下がりを遅延させて信号S1と重ねることによってパルス信号を生成する差分遅延処理部148と、を有する。
(もっと読む)
レーザ光生成回路、レーザレーダ装置および輸送機器
【課題】発光パワーが大きくパルス幅が短いレーザ光を生成することが可能でかつ低消費電力化および小型化が可能なレーザ光生成回路、それを備えたレーザレーダ装置およびそれを備えた乗り物を提供する。
【解決手段】 直流電源PSからインダクタL1に電流が供給され、インダクタL1に磁気エネルギーが蓄積される。インダクタL1の電流が目標値に達すると、インダクタL1に蓄積された磁気エネルギーにより放電コンデンサC3が充電される。放電コンデンサC3が予め定められた電圧値まで充電されたときに、インダクタL1が直流電源PSから遮断される。その後、スイッチング素子S1がオンされる。それにより、放電コンデンサC3に蓄積された電荷の放電によりLD71にパルス状の電流が流れ、LD71からパルス状のレーザ光が出射される。
(もっと読む)
レーダ装置
【課題】よりS/N比のよいレーダ装置を提供する。
【解決手段】所定の照射角度範囲にレーザ光を順次照射する送信部10と、レーザ光が物体に反射した反射光を受光するために複数の受光素子が配列されている受光素子アレイ34と、反射光を受光素子アレイに集光させる受光レンズ32と、受光素子アレイ34を構成する複数の受光素子のうち、送信部10から照射されるレーザ光の照射角度に対応した受光素子を検出可能状態とする演算部60とを備え、受光素子アレイ34の受光信号に基づいて物体検出を行うレーダ装置1であって、受光レンズ32として、光軸が互いに異なる2つの受光レンズ32A、32Bを備える。
(もっと読む)
光学式変位センサシステム、コンソール、コントローラ、およびプログラム
【課題】光学式変位センサを用いて対象物までの距離を簡単に且つ精度良く測定する。
【解決手段】測定対象物に光を投光して、イメージセンサで反射光を受光し、各画素での受光信号出力値を取得する。表示画面上に受光信号出力波形を表示して、表示画面上での画素位置の範囲(有効画素範囲)を設定し、有効画素範囲内での最大受光信号出力値が所定の基準出力値と一致するように検出感度を変更する。そして得られた検出感度を用いて測定対象物の変位を測定する。こうすれば、たとえ測定しようとする箇所から十分な強度の反射光が受光できない場合でも、その箇所を含むように有効画素範囲を設定することで、適切な検出感度を用いて精度良く測定することが可能となる。
(もっと読む)
発光装置、受光システム及び撮像システム
【課題】発熱及び消費電力の抑制、信号光のS/N比の向上等を実現することができ、発光を用いた様々なアプリケーションに適用させることができる発光装置を提供する。
【解決手段】複数の半導体レーザバー12が配列された分散光源14と、分散光源14に対して少なくとも1つの駆動パルスを供給することにより、分散光源14から少なくとも1つのパルス光を出射させる駆動回路16とを有する。分散光源14は、基台18上に、複数の半導体レーザバー12が配列され、さらに、複数の半導体レーザバー12の間にそれぞれ放熱板24が介在されて構成されている。そして、分散光源14から出射されるパルス光のパルス幅が1フェムト秒より長く、且つ、0.25秒未満であり、単一のパルス光のエネルギーが66.8μ[J]未満である。
(もっと読む)
測距システム及び測距方法
【課題】測定精度を向上することが可能な測距システム及び測距方法を提供する。
【解決手段】環境光Lsのみが入射する期間P1、P2において第1スイッチング素子60a、60bのゲートG11、G12を開いて電荷量Q1、Q2を求める。環境光Ls及び反射光Lrが入射する期間P3、P4(それぞれ期間P1、P2と同じ長さである。)において第1スイッチング素子60c、60dのゲートG13、G14を開いて電荷量Q3、Q4を求める。差Q4−Q2と差Q3−Q1との比と、往復期間ΔP(パルス光Lpが測距システム10と対象物Wの間を往復する期間)と期間P3との比が等しいことを利用して往復期間ΔPを演算する。往復期間ΔPと光速cに基づき、測距システム10と対象物Wとの距離Dを求める。
(もっと読む)
21 - 40 / 108
[ Back to top ]