
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
21 - 30 / 6,854
画像間差分装置および画像間差分方法
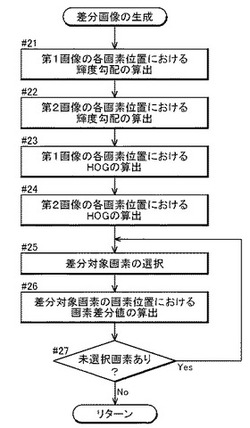
【課題】外乱の影響を受け難いロバストな画像間差分技術を提供する。
【解決手段】勾配方向算出部14aは、画像を構成する各々の画素の画素位置における画素値の勾配方向を求める。ヒストグラム生成部14bは、各々の画素を対象画素として設定するとともに、対象画素の周囲にヒストグラム算出領域を設定し、ヒストグラム算出領域に含まれる画素の画素位置における勾配方向の度数分布を対象画素の画素位置におけるヒストグラムとして生成する。画素差分部14cは、第1の画像の差分対象画素の画素位置におけるヒストグラムと、第2の画像の比較対象画素の画素位置におけるヒストグラムと、の差分値を差分対象画素と比較対象画素との画素差分値として算出する。画像差分部14は、差分対象画素の画素位置における画素値を画素差分値に基づいて設定することにより差分画像を生成する。
(もっと読む)
走行進路生成装置および走行制御装置

【課題】 生成した走行進路に基づいて実進路の走行を行うにあたり、実進路をスムーズなものとし、車両の乗員に与える違和感を小さくすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における走行進路演算部13は、ルート算出部12で算出したルート12に含まれる今回目標通過点と、走行進路記憶部14に記憶された前回走行進路に含まれる前回目標通過点を用いて、今回走行進路を生成する。ここで、前回目標通過点には、車両の近傍における固定目標通過点と固定目標通過点以外の探索目標通過点が含まれており、今回走行進路を生成するにあたり、固定目標通過点は固定とし、探索目標通過点を適宜今回目標通過点に変更して今回走行進路を生成する。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
安全支援装置、及び、安全支援方法
【課題】対象者が安全確保に必要な情報を得ることができるようにすることを目的とする。
【解決手段】車両から所定範囲の画像を撮像する撮像装置と、撮像した前記画像から対象者を検出する対象者検出装置と、検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、を備える安全支援装置。
(もっと読む)
追従制御装置
【課題】自車両を先行車に適切に追従させる。
【解決手段】追従制御装置(100)は、通信により取得された先行車(20)に係る舵角情報に基づいて、自車両(10)を先行車に追従させる制御である追従制御を実施可能な追従制御装置である。該追従制御装置は、追従制御が実施されておらず、且つ、自車両の直進走行時における(i)先行車に係る舵角情報及び(ii)自車両に係る舵角を、夫々取得する取得手段(15)と、取得された先行車に係る舵角情報と取得された自車両に係る舵角との差分を算出し、該算出された差分を自車両の舵角中点として設定する設定手段(15)と、を備える。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
車外環境認識装置130は、複数の色識別子と輝度範囲とを対応付けて保持しておき、車外環境を撮像した画像を取得し、自車両との相対的な位置関係に応じて画像の検出領域を複数の特定領域に分割し(S306)、特定領域毎に色識別子に対応付けられた輝度範囲を再設定し(S308)、検出領域内の複数の対象部位の輝度と対象部位が位置する特定領域に再設定された輝度範囲とに基づいて、対象部位に色識別子を設定し(S310)、水平距離の差分および高さの差分が所定範囲内にある1または複数の対象部位をグループ化する(S312)。
(もっと読む)
車線変更支援装置
【課題】より安全性の高いECOモード走行時の車線変更を実現する。
【解決手段】ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、より安全性の高いECOモード走行時の車線変更を実現する。
(もっと読む)
車両周辺監視用画像生成装置
【課題】魚眼レンズのような広角レンズを用いた撮影画像であっても、車両周辺監視に適したモニタ表示画像を作成することができる画像生成装置の提供。
【解決手段】広角レンズを装着した車載カメラ1によって取得された車両周辺の撮影画像を入力する画像入力部51と、撮影画像の横方向に延びる歪み補正基線によって上下方向で区分けされた撮影画像領域に対して個別に、広角レンズの縦方向のレンズ歪みを補正する画素単位の歪み補正量の強度を設定する補正強度設定部55と、補正強度設定部55によって設定された歪み補正強度に基づいて撮影画像に対する歪み補正を実行する歪み補正実行部54と、歪み補正実行部54によって補正された撮影画像からモニタ表示画像を出力するモニタ表示画像出力部58とが備えられている。
(もっと読む)
障害物計測方法、障害物計測装置及び障害物計測システム
【課題】高速・低速に関わらず、単位時間あたりの演算量が一定になり、単位時間あたりの演算量の上限が規定され、ハード処理・ソフト処理のいずれにおいてもコストダウンを達成可能な障害物計測方法、障害物計測装置及び障害物計測システムを提供する。
【解決手段】この障害物計測方法は、走行物体から障害物までの距離をステレオカメラにより計測する際に、障害物計測の対象領域及びステレオカメラによる画像のフレームレートまたは解像度を走行物体の速度に応じて変化させる。
(もっと読む)
交通システムとこれに用いるコンピュータプログラム、並びに異常事象の判定処理装置
【課題】 他車両2Bとの関係で発生し得る事故の危険性を、自車両2Aの搭乗者に正確に報知できるようにする。
【解決手段】 本発明は、他車両2Bに生じた異常事象を自車両2Aの搭乗者に報知する交通システムに関する。このシステムは、他車両2Bの車両情報に基づいて、他車両2Bに関する異常事象の有無を判定する判定手段(車載コンピュータ31)と、判定手段による判定結果が異常事象ありの場合に、他車両2Bに異常事象が発生したことを自車両2Aの搭乗者に報知する報知手段(ディスプレイ36又はスピーカー37)と、を備える。
(もっと読む)
21 - 30 / 6,854
[ Back to top ]