
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
951 - 960 / 6,854
車載装置および危険運転警告出力記録方法
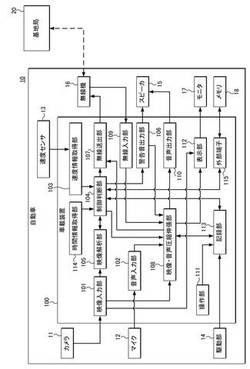
【課題】走行状態に応じて警告を発生するとともに走行状況を記録する車載装置において、警告発生の精度を高めることができるようにする。
【解決手段】車両の走行状態を取得する速度情報取得部と、車両の車外を撮像した映像を入力する映像入力部と、入力した映像から車両の走行位置が所定の基準を満たす状態を検出する映像解析部と、警告音を出力する警告音出力部と、映像から車両の走行位置が所定の基準を満たす状態が映像解析部により検出され、かつ速度情報取得部により取得した走行状態が所定の条件を満たす場合に、警告音出力手段に警告音を出力させる制御判断部と、警告音を含む車内の音声と車外の映像とを記録する記録部とを備える車載装置。
(もっと読む)
走行制御装置

【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
車両誘導装置
【課題】路面勾配などがある場合でも車両を高精度に誘導できる車両誘導装置を提供することを課題とする。
【解決手段】車両を目的位置まで誘導する車両誘導装置であって、車両周辺を撮像する撮像手段と、車両の目的位置を設定する目的位置設定手段と、車両の現在位置から目的位置までの誘導軌跡を算出する誘導軌跡算出手段と、誘導軌跡に従って車両を誘導する車両誘導手段と、車両誘導中に異なる時刻に撮像された複数の画像に基づいて車両の進行方向を判定する判定手段と、その判定した車両の進行方向に基づいて車両の現在位置を更新する現在位置更新手段を備え、誘導軌跡算出手段は、現在位置更新手段で更新した車両の現在位置から目的位置までの誘導軌跡を算出することを特徴とする。
(もっと読む)
車両制御装置
【課題】妥当性が高い自車両のリスクポテンシャルの算出を可能とする車両制御装置を提供する。
【解決手段】車両制御装置1は、自車両の走行環境を認識する走行環境認識部21と、自車両周辺の障害物を認識する障害物認識部23と、車両と障害物との衝突事故に関する過失割合情報データベース15aを格納するDB記憶部15と、走行環境認識手段21で得られる走行環境と、障害物認識手段23で得られる障害物の状態と、DB記憶部15を参照して得られる過失割合情報と、に基づいて、自車両と障害物との衝突事故が発生したと想定した場合における自車両の想定過失割合を算出する想定過失割合算出部25と、を備え、想定過失割合が高いほど、障害物との関係におけるリスクポテンシャルを高く算出する。
(もっと読む)
運転支援装置
【課題】自車両と他車両との衝突可能性判定の精度を上げることができ、自車両の走行している道路と平行な道路を走行する他車両が衝突する可能性があると誤判定することを防ぐことができる運転支援装置を実現する。
【解決手段】自車両情報取得手段と、他車両情報取得手段と、衝突可能性判定手段を備える運転支援装置において、前記衝突可能性判定手段は、自車両の位置と他車両の位置との間の直線距離と、自車両の位置と他車両の位置とを結ぶ直線と他車両の位置から他車両の進行方位へ伸ばした直線とがなす角度とを用いて、他車両の位置から他車両の進行方位へ伸ばした直線と自車両位置との間の最短距離を算出し、この最短距離が予め設定された距離未満である時に自車両と他車両とが衝突する可能性があると判定する。
(もっと読む)
車両周辺画像生成装置および画像切替方法
【課題】車両周辺画像とは別に表示されるリアビュー画像を適切なタイミングで見やすく提供することが可能な「車両周辺画像生成装置および画像切替方法」を提供する。
【解決手段】自車両の少なくとも一部が駐車スペースの中に進入していることを検出する進入状態検出部5と、自車両の少なくとも一部が駐車スペースの中に進入していることが検出されたときに、車両周辺画像からリアビュー画像へと画像の表示を切り替える表示画像切替部7とを備え、自車両の駐車スペースに対する状態に応じて車両周辺画像とリアビュー画像とを適宜切り替えて表示することにより、シーン毎に最適な画像がフル画面で表示されるようにする。
(もっと読む)
自車存在報知装置
【課題】注意喚起音を外部に出力する車両において、車両状況に応じて注意喚起音の出力が騒音となることを防止できる自車存在報知装置を提供する。
【解決手段】位置情報、前記位置情報を含むエリアのエリア情報、及び、前記位置情報を起点とする距離情報、が登録されたテーブル11の記憶手段と、位置検出手段200と、走行距離検出手段16と、車両のメインシステムの起動後、発進するまでの間に、現在位置がエリア内か否かを判定するエリア内判定手段12と、現在位置までの車両の走行距離が距離情報未満か否かを判定する走行距離判定手段13と、現在位置が前記エリア内であるか、又は、走行距離が距離情報未満の場合、音の出力を禁止するか又は音量を低下させる音出力制御手段14と、を有する。
(もっと読む)
人物検出装置、人物検出プログラム、作動制御装置、および衝突緩和装置
【課題】対象物が人物であるか否かを精度よく識別できるようにする技術を提供する。
【解決手段】衝突緩和装置は作動判定処理において、画像センサから取得した画像に基づいて検出された対象物の外観に関するパラメータと人物に関する比較用パラメータとが一致する度合いに応じて、対象物が人物である確率を表す人物確率を演算し(S210:S310〜S330)、人物確率が予め設定された人物閾値以上である場合に対象物が人物であると判定する(S230)。ただし、対象物を検出する際の検出環境に対応する人物の存在確率に応じた補正値を利用して、人物閾値を補正する(S220)。この補正の際には、人物の存在確率が高くなるにつれて対象物が人物であると判定されやすくなるようする。
(もっと読む)
歩行者衝突検出装置
【課題】圧力チャンバ(を備えたチャンバ部材)を用いて歩行者と衝突したことを検知する構成において検出精度を向上させることができる歩行者衝突検出装置を得る。
【解決手段】衝突判定システムは、車両幅方向を長手方向として配置されかつ内部が圧力チャンバ22とされたチャンバ部材20を備えている。チャンバ部材20はバンパリインフォースメント14の前面14Aに隣接して配置されている。バンパカバーとバンパリインフォースメント14との間にはバンパアブソーバ28が配設されている。バンパアブソーバ28は下部に配置される本体部30と、チャンバ部材20とバンパカバーとの隙間に配設される隙詰め部32とで構成されている。さらに、隙詰め部32におけるチャンバ部材20との対向面には凹凸部46が形成されており、歩行者の脚部が侵入すると、2個の凸部42でチャンバ部材20を押圧するようになっている。
(もっと読む)
車両用物体衝突警報システムおよび車両用物体衝突警報方法
車両用物体衝突警報システムは、車両周辺を検知するように構成された検知手段(11)および処理手段(14)を含み、前記処理手段(14)は、前記検知手段(11)により提供された信号を処理することによって、車両周辺の物体を検出するように構成されていて、車両と検出された物体との衝突確率の推定を実行し、衝突確率が無視できない場合に相応の信号を出力する。処理手段(14)は、カーブを通過した後、通過したカーブを記述する情報を決定し、カーブ記述情報を保存し、少なくとも1つの、以前に通過したカーブのカーブ記述情報を用いて、衝突確率の推定による現在のカーブでの車両パスを決定するように構成されている。 (もっと読む)
951 - 960 / 6,854
[ Back to top ]