
国際特許分類[G01B11/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 長さ,幅または厚み測定用 (1,947)
国際特許分類[G01B11/02]の下位に属する分類
点の座標測定によるもの (52)
移動体の長さまたは幅測定用に特に適合したもの (92)
厚み測定用 (668)
国際特許分類[G01B11/02]に分類される特許
31 - 40 / 1,135
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
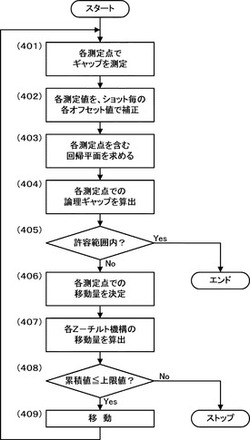
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
位置制御システム、露光装置、及び露光方法

【課題】1つの実施形態は、例えば、基板の表面の位置の計測精度を向上できる位置制御システム、露光装置、及び露光方法を提供することを目的とする。
【解決手段】1つの実施形態によれば、面位置計測部と制御部とを有する位置制御システムが提供される。面位置計測部は、基板の表面の高さ方向の位置を計測する。制御部は、面位置計測部による計測結果に基づいて、光学系と基板の表面との相対的な位置を制御する。面位置計測部は、複数のフォーカスセンサ41−1〜41−3と駆動部42とを有する。駆動部は、基板の表面に対する複数のフォーカスセンサの基板面内方向の位置を独立して駆動する。
(もっと読む)
圧着端子検査装置および圧着端子検査方法
【課題】検査作業者の技量にかかわらず、圧着端子を精度よく検査できる、圧着端子検査装置および圧着端子検査方法を提供する。
【解決手段】圧着端子3の検査時には、検査作業者により、圧着端子検査装置1の端子配置部に圧着端子3が配置されて、圧着端子3が延伸方向に延びる軸線を中心に揺動される。この揺動中に、ハイト測定用エリアイメージセンサ14の撮像面141への圧着端子3の投影における第1測定位置Piおよび第2測定位置PwでのY軸方向寸法Yi,Ywが測定される。そして、Y軸方向寸法Ywの極小値Ywminが圧着端子3のワイヤバレル部32のクリンプハイトHwとして取得される。
(もっと読む)
トロリ線データ比較装置
【課題】過去のトロリ線データと現在のトロリ線データとで走行位置を正確に一致させることを可能としたトロリ線データ比較装置を提供する。
【解決手段】車両の屋根上に配置されて鉛直上方のトロリ線を撮影するラインセンサカメラ2と、ラインセンサカメラ2から入力される映像信号を収録する画像録画部と、画像録画部から現在のトロリ線画像を入力するラインセンサ画像入力部5a、現在のトロリ線画像からトロリ線の摩耗及び偏位を抽出する摩耗・偏位抽出部5b、過去のトロリ線画像と現在のトロリ線画像とから車両の偏位の位置ずれ量を検出する偏位位置ずれ検出部5c、及び位置ずれ量を現在のトロリ線画像に反映し、過去のトロリ線画像と比較する摩耗量比較部5dを備える画像処理部とから構成した。
(もっと読む)
鉄筋規格判別装置及び鉄筋規格情報作成装置
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】携帯端末4は、鉄筋の画像から、背景板Bに対して垂直方向の1ピクセルずつの位置に対応する連続的な径長を抽出する(S1001)。次に、抽出した鉄筋径分布の全データのうち、上部5%のデータと、下部5%のデータとをノイズとして除去する(S1002)。そして、中央部90%のデータにおける最大値を特定し、最大径d1として取得する(S1003)。続いて、鉄筋規格情報452を参照し(S1004)、最大径d1に対応する鉄筋規格を特定できるか否かを判定する(S1005)。鉄筋規格を特定できる場合には(S1005のYES)、該当した鉄筋規格を取得する(S1006)。該当する鉄筋規格を特定できない場合には(S1005のNO)、その旨をオペレータに通知することにより、角度を変えて鉄筋を再度撮影し、画像を抽出し(S1007)、S1001の処理から再試行する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
金属試料を測定する膨張計
【課題】温度に依存する長さの変化を正確に測定することができる膨張計を提供する。
【解決手段】試料3を固定することのできる試料ホルダ4、14と、試料3を加熱するために試料3に配置される少なくとも1つの誘導コイル5と、試料3の温度を測定する少なくとも1つのセンサとを備える、金属試料3を測定する膨張計1であって、試料3の長さの変化を検出する光学測定装置6、9が備えられている。これにより、温度に依存する、試料の長さの変化を正確に測定することができる。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
検査装置、リソグラフィ装置、リソグラフィプロセシングセルおよび検査方法
【課題】回折次数の重なりを防止しつつ基板の特性を精度良く求める技術を提供する。
【解決手段】角度分解分光法に対しては、4つのクアドラントを有する照明プロファイルを有する放射ビームが使用される。第1および第3クアドラントが照明される一方、第2および第4クアドラントは照明されない。したがって、結果として生じる瞳面は4つのクアドラントに分けられ、ゼロ次回折パターンのみが第1および第3クアドラントに現れて一次回折パターンのみが第2および第3クアドラントに現れる。
(もっと読む)
31 - 40 / 1,135
[ Back to top ]