
国際特許分類[G01C9/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 傾斜の測定,例.クリノメーターによるもの,水準器によるもの (770)
国際特許分類[G01C9/00]の下位に属する分類
細部 (358)
ころがる物体の使用によるもの (103)
単一振子の使用によるもの (84)
複数の振子の使用によるもの (1)
液体の使用によるもの (143)
国際特許分類[G01C9/00]に分類される特許
31 - 40 / 81
路面バンク角推定装置
【課題】車輪に路面から作用する力を検出するための力センサを必要とすることなく、安価な構成で、路面のバンク角を安定に推定する。
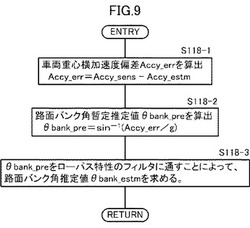
【解決手段】車輪と路面との間の摩擦特性モデルを含む車両モデルを用い、水平面上での車両横力モデル推定値Fgy_total_estmを求めると共に、これを車両質量mで除算してなる横加速度モデル推定値Accy_estmを求める手段と、横加速度モデル推定値Accy_estmと横加速度センサ15の出力が示す横加速度検出値Accy_sensとの偏差を求める手段と、該偏差から路面のバンク角の暫定推定値を求め、該暫定推定値をハイカット特性のフィルタに通すことにより路面のバンク角推定値θbank_estmを求める手段とを備える。
(もっと読む)
地中変位観測装置及び方法

【課題】傾斜地の状態に関わらず設置可能であり、また設置場所確保のため樹木の伐採を必要としない地中変位観測装置及び方法を提供することができる。
【解決手段】トンネル90内からこのトンネル90の周辺に存在する傾斜地95に向かって延在するボーリング孔92内の変位を測定することによって、地山の変動を観測する地中変位観測装置1であって、FRPロッド40と、地中変位観測装置1に沿って配置され、自身の傾きを検出する傾斜計20と、を備えている、ことを特徴とする地中変位観測装置1とする。
(もっと読む)
坂道検出方法及び坂道検出装置
【課題】坂道の有無を高い精度で検出する坂道検出方法及び坂道検出装置を提供する。
【解決手段】所定の頻度で気圧計から気圧データを取得する気圧測定ステップと、所定の単位走行距離ごとに前記気圧データから高度を算出し、前回算出した高度との差異から、前記単位走行距離における勾配を算出する勾配算出ステップと、前記単位走行距離ごとに算出された前記勾配が、所定回数以上、連続して所定範囲内にある場合、坂道と判定して坂道信号を出力する坂道検出ステップと、を含む。
(もっと読む)
道路勾配計測装置、道路勾配計測方法
【課題】車両を走行させながら高い精度で道路勾配を計測する。
【解決手段】ジャイロセンサを用いて、車両の走行中のピッチ角を検出する。また、車両の前後方向に位置を異ならせた複数箇所で、車両の車体と路面との距離を検出することによって、車両傾き角を検出する。そして、ピッチ角と車両傾き角との偏差に基づいて、走行中の道路の道路勾配を検出する。ピッチ角は、車両傾き角および道路勾配のみによって決定され、ジャイロセンサを用いれば精度良くピッチ角を検出することができる。従って、車両の前後で路面との距離を検出して車両傾き角を求めてやれば、ピッチ角と車両傾き角との偏差から、精度良く道路勾配を算出することが可能となる。
(もっと読む)
傾斜センサ内蔵小型電子機器及び補正方法
【課題】ユーザ自身が容易に正確なキャリブレーションを行うことができる傾斜センサ内蔵小型電子機器及び補正方法を提供すること。
【解決手段】傾斜を算出する加速度センサ45と、加速度センサ45における算出値に基づいて所定の制御を行うCPU49と、加速度センサ45及びCPU49を内部に有する筐体と、筐体を吊り下げる取付部31と、を備える。CPU49は、取付部31にて筐体が吊り下げられて静止した状態に基づいて加速度センサ45の基準値の補正制御を行う。
(もっと読む)
傾斜計
【課題】垂直或いは垂直からの傾斜角を計測するための傾斜計を提供する。
【解決手段】傾斜計10は、遊技機の盤面である被測定面20上の釘21よりも長い設置用脚30及び40を備える。設置用脚30及び40の先端を被測定面20に当接させて盤面との距離を一定にした状態で、傾斜計本体11に対して固定の位置関係にある仮想の軸の傾斜角を測定される。傾斜計10を被測定面20に固定する際、設置用脚30に設けられた可動体31を用いる。可動体31に外力を加え可動体31の釘21の釘傘22に対する接面35を可動体31を傾斜計本体11方向に付勢するの弾性体31の弾性力に抗して釘傘22よりも傾斜計本体11から遠い位置にまで移動させてから、接面35を釘傘22の被測定面20側の面に係止させる。そのような弾性体を備える可動体31を用いることで、正確に盤面の傾斜角を測定できる。
(もっと読む)
ガスホルダの異常検出装置
【課題】本発明は、ガスホルダの内槽の傾き又は水平面内の偏りを正確に検出することが可能なガスホルダの異常検出装置を提供することを目的とする。
【解決手段】本発明は、内槽12cの径外方向外側に配置された非接触式距離計20が計測する内槽12a〜12cの側面部121までの距離と該内槽12a〜12cの径とに基づいて、内槽12a〜12cの上下2箇所における水平位置を検出し、該2箇所の水平位置に基づいて内槽12a〜12cの傾きを検出すると共に、少なくとも何れか1方の水平位置に基づいて内槽12a〜12cの水平面内の偏りを検出するガスホルダの異常検出装置1を提供する。
(もっと読む)
坂道の傾斜角度の自動計算プロセス、およびこのプロセスを実行する装置
【課題】坂道に至る前に、車両の走行に係るパラメータ(前照灯の向きやエンジンの燃料消費量)を調整するための前提となる傾斜角度を自動的に計算するプロセスを提供する。
【解決手段】
カメラ201を搭載した車両200が接近している坂道204上の対象地点までの傾斜角度θの自動計算プロセスであって、
−道路203の画像において、近傍の道路の両側に位置する第1の参照マークを検知する過程と、
−遠方の道路の両側に位置する第2の参照マークを検知する過程と、
−画像処理システムを用いて、第1の参照マークが延びる方向と、第2の参照マークが延びる方向との変化を検出する過程と、
−変化が検出されたときに、坂道204の存在を認識し、かつ変化の大きさから、第2の対象地点P2までの傾斜角度θを算出する過程とを含むようにする。
(もっと読む)
携帯電子機器及びその制御方法
【課題】ユーザが意識的に傾ける動作を行ったことを好適に推定し、それ以外の動作を排除することができる携帯電子機器あるいはその制御方法を提供すること。
【解決手段】LED46a〜46nと、加速度を検出する加速度センサ45と、加速度センサ45により検出された加速度値に応じてLED46a〜46nの表示態様の制御を行うCPU49と、を備える携帯電子機器であって、CPU49は、所定周期ごとの加速度値を累積的に積算する加速度値積算手段と、加速度値積算手段による所定期間分の積算値が加速度センサ45の静止状態から一定の傾斜状態を示す第1の閾値を超えるか否かを判定する積算値判定手段と、積算値判定手段により積算値が、第1の閾値を超えたと判定された場合には、LED46a〜46nが所定の態様で表示を行うように制御する表示制御手段と、を備える。
(もっと読む)
路面勾配推定装置
【課題】より正確に路面勾配を推定できる路面勾配推定装置を提供する。
【解決手段】車速に対応して設定した路面勾配の変化率の制限値および路面勾配の制限値を加味することにより、前後加速度センサ5のセンサ値Aから車輪速度の時間変動分A’を減算することで求めた勾配推定値の加速度換算値Ggrad0が外乱要因の影響により正確でない値となる場合に制限を設けることができる。このため、正確に勾配推定値の加速度換算値Ggradを求めることが可能になり、従来と比べて、より正確に路面勾配を推定することが可能となる。
(もっと読む)
31 - 40 / 81
[ Back to top ]