
ウェーハ除電装置及びウェーハの除電方法
【課題】コロナ放電を用いたイオナイザの電極針先端部に堆積した不純物がウェーハの表面に落下することを防ぐ。
【解決手段】プリアライナ1の上方を覆うカバー13と、カバー13の外周部又は外周部の下方に設置されたイオン供給部14とを含み、イオン供給部14のイオン供給口15がカバー13とプリアライナ1との間の空間部に向けられているウェーハ除電装置を用いる。
【解決手段】プリアライナ1の上方を覆うカバー13と、カバー13の外周部又は外周部の下方に設置されたイオン供給部14とを含み、イオン供給部14のイオン供給口15がカバー13とプリアライナ1との間の空間部に向けられているウェーハ除電装置を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ウェーハ搬送装置におけるウェーハの除電装置及び除電方法に関する。
【背景技術】
【0002】
ウェーハ搬送装置は、ウェーハを搬送するロボット、ロボットで搬送されたウェーハの偏芯量及びノッチ位置(又はオリフラ位置)を補正するプリアライナ、並びにそれらを制御するコントローラで構成されている。ウェーハ搬送装置は、ミニエンバイロメント(略してミニエンとも呼ぶ。)に設置して使用されている。
【0003】
プリアライナは、本体、ウェーハ回転部及びエッジ検出センサで構成される。
【0004】
搬送ロボットがウェーハを搬送してウェーハ回転部に載せた後、ウェーハ回転部がウェーハを把持して回転させる。回転するウェーハのエッジをエッジ検出センサで検知し、回転中心からの偏芯量及びノッチ位置又はオリフラ位置を求め、ノッチ位置又はオリフラ位置を予め定められた方向へウェーハを回転させる。(それらの一連の作業を、以下、アライメントと呼ぶ。)
ウェーハの搬送においては、ウェーハに対する静電気力による微粒子の吸着や、放電による静電破壊等の静電気に起因する問題が発生することを避けるため、除電装置が必要となる。除電装置は、除電対象物に空気イオンを供給するイオナイザを用いる。
【0005】
ウェーハの除電は、ウェーハの表面の静電荷をその静電荷と反対の電荷を有する空気イオンによって中和させるものである。空気イオンを発生させる装置としては、コロナ放電式イオナイザが広く利用されている。
【0006】
コロナ放電式イオナイザは、針状電極と接地対極との間に高電圧を印加することにより、針状電極の周囲に形成される高電界によって空気分子を電離し、正又は負の空気イオンを発生させる。
【0007】
しかし、コロナ放電式イオナイザは、ミニエンの内部に気体として存在しているシロキサン(シリコン系物質)等が酸化されて電極針先端部に不純物として堆積し、この不純物(堆積物)が飛散することにより発塵することが知られている。
【0008】
この堆積物の飛散による発塵を避けるために、コロナ放電を利用しない方法として、軟X線を照射し、電物周辺の雰囲気をイオン化させ、静電気を中和させる方法が知られている(特許文献1)。
【0009】
また、コロナ放電式のイオナイザにおいて、電極針への特定の気体の流れを作り出すことにより、電極針先端への不純物の付着を防ぐ方法が提案されている(特許文献2)。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−194371号公報
【特許文献2】特開2009−070707号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1記載のイオナイザの場合、軟X線に対する安全対策が必要となり、人がイオナイザに近づく場所や被除電物にアクセスする場所にインターロックを備えることが必要となる。また、特許文献2記載のイオナイザの場合、コロナ放電方式であるため、不純物の堆積を完全に無くして発塵をゼロにすることは困難である。
【0012】
本発明の目的は、コロナ放電を用いたイオナイザの電極針先端部に堆積した不純物がウェーハの表面に落下することを防ぐことにある。
【課題を解決するための手段】
【0013】
本発明のウェーハ除電装置は、プリアライナの上方を覆うカバーと、前記カバーの外周部又は外周部の下方に設置されたイオン供給部とを含み、前記イオン供給部のイオン供給口が前記カバーと前記プリアライナとの間の空間部に向けられていることを特徴とする。
【発明の効果】
【0014】
本発明によれば、イオナイザの電極針先端部に堆積した不純物がウェーハの表面に落下することを防ぎ、クリーンな環境下でウェーハ搬送を行うことができる。
【図面の簡単な説明】
【0015】
【図1】実施例1に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図2】従来のウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図3】実施例2に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図4】実施例3に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図5】実施例4に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図6】実施例5に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図7】実施例6に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図8】実施例7に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
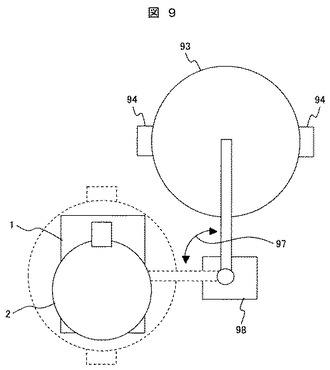
【図9】実施例8に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す上面図である。
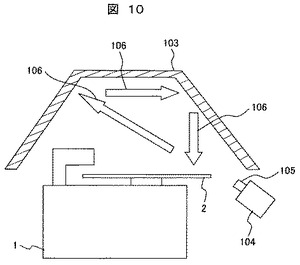
【図10】実施例9に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
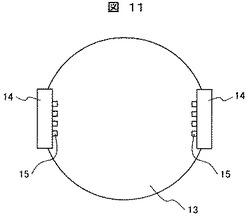
【図11】実施例1のウェーハ除電装置を示す下面図である。
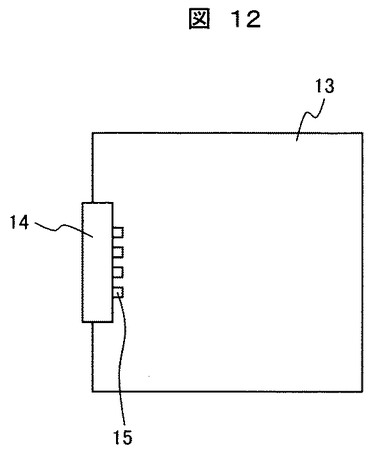
【図12】ウェーハ除電装置の変形例を示す下面図である。
【図13】ウェーハ除電装置の変形例を示す下面図である。
【発明を実施するための形態】
【0016】
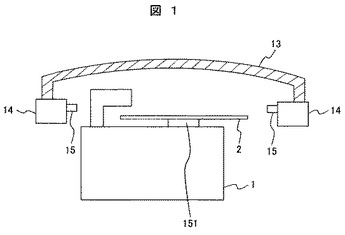
図2は、従来のウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す構成図である。
【0017】
ウェーハ搬送装置におけるウェーハの除電は、ウェーハ搬送装置の上部や本図に示すようにプリアライナ1の上部にイオナイザ24を設置し、イオナイザ24から空気イオンを発生させてウェーハ2の除電を行う。
【0018】
イオナイザ24には、空気イオンのイオン供給口25(吹き出し口)が設けられている。イオナイザ24と除電対象物との距離が近い方が除電の効率が高い。ウェーハ2全体を除電するため、プリアライナ1でウェーハ2を回転させるアライメント動作中に、イオナイザ24に設けたイオン吹き出し口25からイオン化された気体(空気イオン)を供給している。ここでは、空気イオンの流れを矢印26で示している。
【0019】
以下、本発明の一実施形態に係るウェーハ除電装置及びこれを備えたウェーハ搬送装置並びにウェーハの除電方法について説明する。
【0020】
前記ウェーハ除電装置は、プリアライナの上方を覆うカバーと、カバーの外周部又は外周部の下方に設置されたイオン供給部とを含み、イオン供給部のイオン供給口がカバーとプリアライナとの間の空間部に向けられている。
【0021】
前記ウェーハ除電装置において、イオン供給口は、プリアライナのウェーハ把持部に把持されるウェーハの外周部よりもウェーハの半径方向にウェーハの中心から離れた位置に設置されている。
【0022】
前記ウェーハ除電装置は、空間部に送風部を設けてある。
【0023】
前記ウェーハ除電装置は、ウェーハ把持部の上面よりも低い位置に送風部を設けてある。
【0024】
前記ウェーハ除電装置は、カバーをプリアライナの上方に配置した状態で回転させるための回転動力部を設けてある。
【0025】
前記ウェーハ除電装置は、カバーをプリアライナの上方から他の位置へ移動させるための駆動部を設けてある。
【0026】
前記ウェーハ除電装置は、ウェーハの回転を制御するための制御部を有し、この制御部は、イオン供給部から空気イオンを発生させた状態でウェーハを回転させる指令を発する。
【0027】
前記ウェーハ除電装置において、カバーは、光学的に透明な絶縁体で形成されている。
【0028】
前記ウェーハ搬送装置は、ウェーハ除電装置を備えている。
【0029】
前記ウェーハの除電方法は、プリアライナの上方を覆うカバーとプリアライナとの間の空間部に向けて空気イオンを供給し、送風部による送風、カバーの回転及びプリアライナのウェーハ把持部に把持されたウェーハの回転のうち少なくともいずれか1つを行うことにより空間部に気流を発生させるものである。
【0030】
前記ウェーハの除電方法において、ウェーハの回転は、プリアライメントの動作であってもよい。
【0031】
前記ウェーハの除電方法において、カバーをプリアライナの上方へ移動する動作は、ウェーハをウェーハ把持部に搬送した後に行い、カバーをプリアライナの上方から除去する動作は、プリアライメントの動作が終了した後に行うようにしてもよい。
【0032】
以下、実施例を用いて説明する。なお、プリアライナのウェーハ把持方式は、真空吸着方式、エッジチャック方式等を問わない。
【実施例1】
【0033】
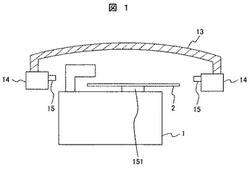
図1は、ウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す構成図である。
【0034】
本図において、プリアライナ1は、ウェーハ2を把持するためのウェーハ把持部151を有し、プリアライナ1の上方には、プリアライナ1及びウェーハ2全体を覆うドーム状のカバー13が設置してある。カバー13の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送するときにカバー13に干渉することが無いようにするため、カバー13の一部を切り欠いている(図示せず)。
【0035】
本図において、カバー13については、断面を表している。カバー13は、光学的に透明な絶縁体(例えば、アクリル樹脂、ポリプロピレン等)で構成することにより、カバー13で覆われた状態でもウェーハ2を目視で確認することが可能となっている。
【0036】
イオナイザ14(イオン供給部)は、ウェーハ2の上方を覆っているカバー13の外周部に設置されている。イオナイザ14のイオン供給口15は、カバー13の中心方向(カバー13とプリアライナ1との間の空間部)を向いていて、ウェーハ2の上部からは離れた位置に置かれている。ここで、カバー13の「外周部」とは、ドーム状のカバー13の下端部付近であってカバー13に接した部位をいう。
【0037】
本実施例において、ウェーハ2の直径は300〜450mmであり、カバー13の直径は600〜800mmである。これらの寸法については、本実施例に限定されるものではない。
【0038】
イオナイザ14は、イオン供給口15から空気イオンを供給し、供給された空気イオンは、カバー13に覆われた内部に蓄積される。搬送ロボットによりプリアライナ1に搬送されたウェーハ2は、カバー13の下方に置かれている。カバー13の内側の空間(カバー13とプリアライナ1との間の空間部)に蓄積されていた空気イオンによって、ウェーハ2は除電される。
【0039】
また、アライナ1によってウェーハ2を回転することにより、カバー13の内側に空気の流れを発生させてもよい。カバー13の内側を漂っている空気イオンは、カバー13の内側に発生した気流に乗ってウェーハ2の上面へ運ばれる。このとき、ウェーハ2が回転しているため、空気イオンはウェーハ2の全面へ到達してウェーハ2全体が除電される。アライナ1によるウェーハ2の回転は、アライメント(プリアライメント)の動作として行ってもよい。
【0040】
一般に、イオナイザ14は、イオン供給口15から空気イオンと共にエアを噴射し、空気イオンをエアに乗せて除電対象物(ウェーハ2)まで運んでいる。本実施例においては、アライメント時のウェーハ2の回転により、カバー13の内側に気流が発生するため、イオナイザ14から供給された空気イオンは、イオナイザ14のイオン供給口15から噴射されるエアを利用しなくても、ウェーハ2上面まで運ばれる。ゆえに、イオナイザ14のイオン供給口15からエアを噴射しなくてもよい。
【0041】
そして、本実施例においては、イオナイザ14のイオン供給口25がウェーハ2の上方にないため、イオナイザ14のイオン供給口15にある電極針先端部に堆積した不純物がウェーハ2の上面に落下することがない。
【0042】
図11は、本実施例のウェーハ除電装置を示す下面図である。
【0043】
本図においては、カバー13の下端部の2か所にイオナイザ14が設置してある。イオナイザ14は、カバー13の線対称の位置に設置してある。それぞれのイオナイザ14には、イオン供給口15が4個設けてある。4個のイオン供給口15から同一種類の空気イオン、すなわち、正イオン又は負イオンを供給してもよく、4個のイオン供給口15から交互に異なる種類の空気イオン、すなわち、正イオン及び負イオンを供給してもよい。
【0044】
また、線対称のイオナイザ14の一方から正イオンを供給し、他方から負イオンを供給する構成としてもよい。
【0045】
さらに、それぞれのイオン供給口15から供給する空気イオンの正負を切り替えることができるようにしてもよい。
【0046】
図12は、ウェーハ除電装置の変形例を示す下面図である。
【0047】
本図の場合、カバー13は矩形状であり、1辺のみにイオナイザ14が設置してある。
【0048】
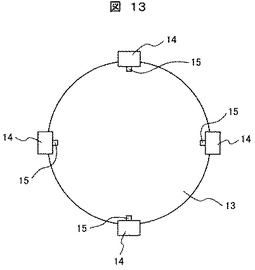
図13は、ウェーハ除電装置の変形例を示す下面図である。
【0049】
本図においては、カバー13は、円形状であり、カバー13の下端部の4か所にイオナイザ14が設置してある。4か所のイオナイザ14は、カバー13の中心を軸として90°間隔で設置してある。それぞれのイオナイザ14には、イオン供給口15が1個設けてある。
【実施例2】
【0050】
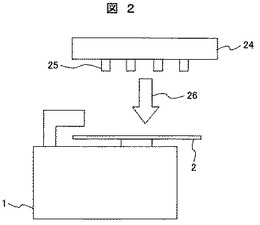
図3は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0051】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー33で覆われている。カバー33の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー33に干渉することが無いようにカバー33の一部を切り欠いている(図示せず)。
【0052】
本図において、カバー33については、断面を表している。また、カバー33には、貫通孔7が設けられており、貫通孔7は、設置場所、個数及び形状を問わない。
【0053】
イオナイザ34は、ウェーハ2の上方を覆っているカバー33の外周部に設置されている。イオナイザ34のイオン供給口35は、ウェーハ2の上方にはなく、カバー33の中心方向を向いている。イオナイザ34から供給された空気イオンは、カバー33の内側に蓄積される。
【0054】
カバー33の上方に設けられたFFU(ファン・フィルター・ユニット、図示せず)からのダウンフローにより、ウェーハ搬送装置には常に上から下への気流が供給されている。カバー33には、貫通孔7が設けられているため、そのカバー33の内側には、FFUのダウンフローの気流が貫通孔7から流れ込む。そのため、カバー33の内側に漂っている空気イオンは、貫通孔7から流れ込んできたFFUのダウンフローの気流に乗ってウェーハ2上面まで運ばれる。この時、ウェーハ2はアライメントのために回転しているため、イオナイザ34から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0055】
そして、イオナイザ34のイオン供給口35は、ウェーハ2の上方にないため、本実施例に示すウェーハ除電方法の場合、イオナイザ34のイオン供給口35にある電極針先端部に堆積した不純物がウェーハ2の上面に落下することがない。
【実施例3】
【0056】
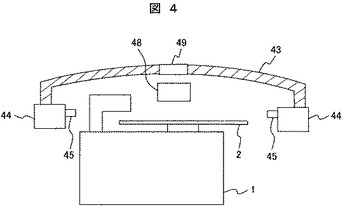
図4は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0057】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー43で覆われている。カバー43の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー43に干渉することが無いようにカバー43の一部を切り欠いている(図示せず)。
【0058】
本図においては、カバー43については、断面を表している。イオナイザ44は、ウェーハ2の上方を覆っているカバー43の外周部に設置されており、イオナイザ44のイオン供給口45は、ウェーハ2の上方にはなく、カバー43の中心方向を向いている。イオナイザ44から供給された空気イオンは、カバー43の内側の空間に蓄積される。
【0059】
カバー43の内側には、ファン48(送風部)が設置されている。ファン48は、上下方向を軸とする軸流ファンである。
【0060】
ファン48の送風方向は、ファン48が正回転する場合、ウェーハ2の上面に向かうようになっている。このため、カバー43の内側から下に向かって気流が発生する。この気流により、イオナイザ44から供給された空気イオンは、ウェーハ2の上面まで運ばれる。イオナイザ44から供給された空気イオンがファン48から発生する気流に乗ってウェーハ2の上面に運ばれている時、ウェーハ2はアライメントのために回転している。このため、イオナイザ44から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0061】
また、ファン48は、常に稼働させる必要はない。搬送ロボットによりウェーハ2がプリアライナ1へ搬送される際、ウェーハ搬送装置からファン48に稼働の指令を出す。ウェーハ搬送装置からの稼働の指令を受け、ファン48が稼働する。ファン48から発生する気流により、カバー43の内側に漂っているイオナイザ44から供給されたイオンは、ウェーハ2の上面まで運ばれる。この時、ウェーハ2は、アライメントにより回転しているため、イオナイザ44から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置からファン48に稼働停止の指令を出す。ウェーハ搬送装置からの稼働停止の指令を受け、ファン48は稼働を停止する。
【0062】
さらに、ファン48の上部のカバー43には、開閉機構49が設けてある。開閉機構49は、カバー43に貫通孔を開け、その貫通孔を開閉させる機能を有する。通常、開閉機構49は閉状態で使用する。
【0063】
プリアライナ1にウェーハ2が把持されていない時、開閉機構49を開状態にしてファン48を逆回転させる。ファン48によりカバー43内側の空気は、貫通孔を通してカバー43の外部へ吐き出される。カバー43の内側にあった空気がカバー43の外部へ吐き出されることにより、カバー43の内側に向かって、下から上への気流が発生する。その気流により、更に多くの空気イオンが、カバー43の内側へ運ばれて空気イオンが供給される。その状態でファン48を正回転させると、更に多くのイオンがウェーハ2の全面に運ばれ、ウェーハ2の除電効率が向上する。
【実施例4】
【0064】
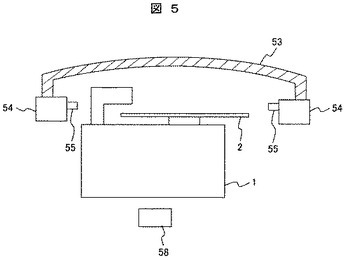
図5は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0065】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー53で覆われている。カバー53の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー53に干渉することが無いようにカバー53の一部を切り欠いている(図示せず)。
【0066】
本図において、カバー53については、断面を表している。イオナイザ54は、ウェーハ2上部を覆っているカバー53の外周部に設置されている。イオナイザ54のイオン供給口55は、ウェーハ2の上方にはなく、カバー53の中心方向を向いている。イオナイザ54から供給された空気イオンは、カバー53の内側の空間に蓄積される。
【0067】
ウェーハ2より下方にファン58が設置されている。ファン58は、上下方向を軸とする軸流ファンである。
【0068】
ファン58の送風は、ウェーハ搬送装置の下面に向かっており、カバー53の内側においては、ファン58に向かう気流が発生する。この気流により、カバー53の内側にある空気イオンは、ウェーハ2の上面に運ばれる。ファン58に向かう気流により、カバー53内側に漂っているイオナイザ54から供給された空気イオンがウェーハ2の上面に運ばれている時、ウェーハ2は、アライメントのために回転している。このため、イオナイザ54から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0069】
なお、ファン58は、常に稼働させる必要はない。搬送ロボットによりプリアライナ1へウェーハ2が搬送される際、ウェーハ搬送装置からファン58に稼働の指令を出す。ウェーハ搬送装置からの稼働指令により、ファン58は回転する。ファン58から発生する気流により、カバー53の内側にある空気イオンは、ウェーハ2の上面まで運ばれる。イオナイザ54から供給された空気イオンがファン58から発生する気流に乗ってウェーハ2上面に運ばれている時、ウェーハ2はアライメントのために回転している。このため、イオナイザ54から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2の全体が除電される。
【0070】
ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を受け取ると、ウェーハ搬送装置からファン58に稼働停止の指令が出される。ウェーハ搬送装置からの稼働停止の指令を受け、ファン58は稼働を停止する。アライメントの際においてだけファン58を稼働することにより、カバー53の内側にイオナイザ54から供給された空気イオンを蓄積される。ファン58から発生する気流により蓄積された空気イオンがウェーハ2の上面に移動するため、ウェーハ2の除電効率が向上する。
【実施例5】
【0071】
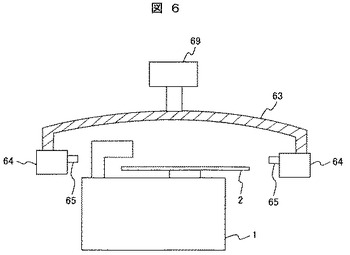
図6は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0072】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー63で覆われている。カバー63の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー63に干渉することが無いようにカバー63の一部を切り欠いている(図示せず)。
【0073】
本図において、カバー63については、断面を表している。イオナイザ64は、ウェーハ2の上方を覆っているカバー63の外周部に設置されている。イオナイザ64のイオン供給口65は、ウェーハ2の上方にはなく、カバー63の中心方向を向いている。イオナイザ64から供給された空気イオンは、カバー63の内側の空間に蓄積される。
【0074】
カバー63の上部には、モータ69(回転動力部)が設置してあり、このモータ63の回転によってカバー63を回転させる機構を設けている。モータ69の設置位置は、カバー63の上部の中心部が望ましい。カバー63の回転により、カバー63の内側に気流を発生させ、カバー63の内側にある空気イオンは、ウェーハ2の上面へ運ばれる。イオナイザ64から供給された空気イオンがウェーハ2の上面に運ばれている時、ウェーハ2は回転している。このため、イオナイザ64から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0075】
なお、カバー63を常に回転させる必要はない。搬送ロボットによりプリアライナ1へウェーハ2が搬送される際、ウェーハ搬送装置からモータ69に稼働の指令が出され、この指令によってモータ69が回転する。ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置からモータ69に稼働停止の指令が出され、この指令を受けてモータ69は稼働を停止する。アライメントの際においてだけカバー63を回転させることにより、カバー63の内側の空間にイオナイザ64から供給された空気イオンが蓄積される。カバー63の内側に発生する気流により、蓄積された空気イオンがウェーハ2の上面へ移動するため、ウェーハ2の除電効率が向上する。
【実施例6】
【0076】
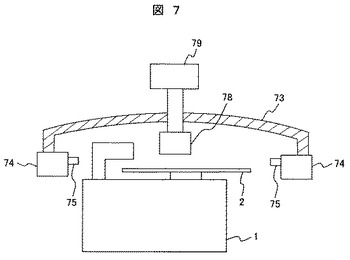
図7は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0077】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー73で覆われている。カバー73の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー73に干渉することが無いようにカバー73の一部を切り欠いている(図示せず)。
【0078】
本図において、カバー73については、断面を表している。イオナイザ74は、ウェーハ2の上方を覆っているカバー73の外周部に設置されている。イオナイザ74のイオン供給口75は、ウェーハ2の上方にはなく、カバー73の中心方向を向いている。イオナイザ74から供給されたイオンは、カバー73の内側の空間に蓄積される。
【0079】
カバー73の上部には、モータ79が設置してあり、このモータ79の回転によりファン78を回転させる機構を設けている。ファン78は、円板の表面に複数の羽根を角度を持たせて(角度は直角でもよい。)設け、ドラム状にした多翼ファンであり、遠心ファンとして機能する。
【0080】
モータ79によりファン78を回転させると、ファン78の回転軸方向から空気が吸われ、ファン78の外周部から空気が吐き出される。その結果、ファン78の回転に伴って、カバー73の内側に気流が発生し、カバー73の内側にある空気イオンは、気流に乗ってウェーハ2上面まで運ばれる。この時、ウェーハ2は、アライメントにより回転しているため、イオナイザ74から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0081】
また、ファン78を常に回転させる必要はない。搬送ロボットによりプリアライナ1へウェーハ2が搬送される際、ウェーハ搬送装置からモータ79に稼働の指令が出され、それによりファン78が回転する。ウェーハ2のアライメントが終わり、ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置からモータ79に稼働停止の指令が出され、それによりファン78は稼働を停止する。アライメントの際においてだけファン78を回転させることにより、カバー73の内側の空間にイオナイザ74から供給された空気イオンが蓄積される。カバー73の内側に発生する気流により、蓄積された空気イオンがウェーハ2の上面へ移動するため、ウェーハ2の除電効率が向上する。
【実施例7】
【0082】
図8は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0083】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー83で覆われている。カバー83の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー83に干渉することが無いようにカバー83の一部を切り欠いている(図示せず)。
【0084】
プリアライナ1の上方に設置されているカバー83には、駆動部88を設け、カバー83を移動させることができるようにしてある。動作の方向を矢印87で示している。
【0085】
搬送ロボットによりウェーハ2がプリアライナ1へ搬送される際、駆動部88は、ウェーハ搬送装置からプリアライナ1の上方への移動指令を受ける。この移動指令により、カバー83はプリアライナ1の上方に移動する。
【0086】
この後、イオナイザ84から空気イオンを供給し、空気イオンがカバー83の内側の空間に蓄積される。そして、搬送ロボットによりプリアライナ1にウェーハ2が搬送される。カバー83の内側の空間に蓄積されている空気イオンは、カバー83の下方にあるウェーハ2に向かって移動し、ウェーハ2は除電される。イオナイザ84から供給された空気イオンがウェーハ2の上面に移動している時、ウェーハ2は回転しているため、イオナイザ84から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0087】
また、ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置から駆動部88にプリアライナ1の表面近傍からの移動指令を出す。この移動指令により、カバー83はプリアライナ1の表面近傍から移動する。アライメントの際においてだけカバー83がプリアライナ1の上方(表面近傍)へ移動することにより、アライメントの際を除いてプリアライナ1の周辺部におけるダウンフローが流れにくくなることを防ぐことができる。
【実施例8】
【0088】
図9は、プリアライナ及び除電装置の他の実施例を示す上面図である。
【0089】
本図においては、ウェーハ2を把持したプリアライナ1をその上方に設置されたドーム状のカバー93で覆うことができるようになっている(破線で示してある。)。カバー93の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー93に干渉することが無いようにカバー93の一部を切り欠いている(図示せず)。
【0090】
駆動部98を設けることにより、プリアライナ1の上方から水平方向に離れた位置に設置されているカバー93をプリアライナ1の上方へ移動することができるようにしている。動作の方向を矢印97で示している。
【0091】
搬送ロボットによりウェーハ2がプリアライナ1へ搬送される際、駆動部98は、プリアライナ1の上方への移動指令を受ける。この移動指令により、カバー93は、プリアライナ1の上方に移動する。カバー93がプリアライナ1の上方へ移動すると、イオナイザ94が空気イオンを供給し、空気イオンがカバー93の内側の空間に蓄積される。そして、搬送ロボットによってプリアライナ1にウェーハ2が搬送され、カバー93の内側に蓄積されている空気イオンは、カバー93の下方にあるウェーハ2に向かって移動し、ウェーハ2が除電される。イオナイザ94から供給された空気イオンがウェーハ2の上面に移動している時、ウェーハ2は回転しているため、イオナイザ94から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0092】
また、ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置から駆動部98にプリアライナ1の上方からの移動指令を出す。この移動指令により、カバー93はプリアライナ1の上方から移動する。アライメントの際においてだけカバー93をプリアライナ1の上方へ移動することにより、プリアライナ1の周辺部のダウンフローがカバー93によって妨げられる状態を短時間とすることができる。
【実施例9】
【0093】
図10は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0094】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置された円錐台状のカバー103で覆われている。カバー103の下端は、ウェーハ2の位置と同程度の高さになっている。カバー103の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー103に干渉することが無いようにカバー103の一部を切り欠いている(図示せず)。
【0095】
本図において、カバー103については、断面を表している。イオナイザ104は、ウェーハ2が形成する水平面より下方に設置され、イオナイザ104のイオン供給口105が斜め上方を向けられ、且つ、イオン供給口105がカバー103とウェーハ2との隙間に設置されている。空気イオンは、斜め上方に向けて供給される。
【0096】
イオナイザ104は、イオン供給口105から空気イオンと共にエアを供給することができるようになっている。すなわち、空気イオンは、エアとともにカバー103の内側の空間に運ばれるようになっている。空気イオンの流れは、矢印106で示している。イオン供給口105から供給された空気イオンを伴ったエアの気流は、カバー103の内壁に衝突して流れを変え、ウェーハ2の上面に向かうようになっている。この時、ウェーハ2はアライメントのために回転しているため、空気イオンは、ウェーハ2の全面に到達し、ウェーハ2全体が除電される。
【符号の説明】
【0097】
1:プリアライナ、2:ウェーハ、7:貫通孔、13、33、43、53、63、73、83、93、103:カバー、14、24、34、44、54、64、74、84、94、104:イオナイザ、15、25、35、45、55、65、75、105:イオン供給口、26、106:矢印、48、58、78:ファン、49:開閉機構、69、79:モータ、88、98:駆動部、151:ウェーハ把持部。
【技術分野】
【0001】
本発明は、ウェーハ搬送装置におけるウェーハの除電装置及び除電方法に関する。
【背景技術】
【0002】
ウェーハ搬送装置は、ウェーハを搬送するロボット、ロボットで搬送されたウェーハの偏芯量及びノッチ位置(又はオリフラ位置)を補正するプリアライナ、並びにそれらを制御するコントローラで構成されている。ウェーハ搬送装置は、ミニエンバイロメント(略してミニエンとも呼ぶ。)に設置して使用されている。
【0003】
プリアライナは、本体、ウェーハ回転部及びエッジ検出センサで構成される。
【0004】
搬送ロボットがウェーハを搬送してウェーハ回転部に載せた後、ウェーハ回転部がウェーハを把持して回転させる。回転するウェーハのエッジをエッジ検出センサで検知し、回転中心からの偏芯量及びノッチ位置又はオリフラ位置を求め、ノッチ位置又はオリフラ位置を予め定められた方向へウェーハを回転させる。(それらの一連の作業を、以下、アライメントと呼ぶ。)
ウェーハの搬送においては、ウェーハに対する静電気力による微粒子の吸着や、放電による静電破壊等の静電気に起因する問題が発生することを避けるため、除電装置が必要となる。除電装置は、除電対象物に空気イオンを供給するイオナイザを用いる。
【0005】
ウェーハの除電は、ウェーハの表面の静電荷をその静電荷と反対の電荷を有する空気イオンによって中和させるものである。空気イオンを発生させる装置としては、コロナ放電式イオナイザが広く利用されている。
【0006】
コロナ放電式イオナイザは、針状電極と接地対極との間に高電圧を印加することにより、針状電極の周囲に形成される高電界によって空気分子を電離し、正又は負の空気イオンを発生させる。
【0007】
しかし、コロナ放電式イオナイザは、ミニエンの内部に気体として存在しているシロキサン(シリコン系物質)等が酸化されて電極針先端部に不純物として堆積し、この不純物(堆積物)が飛散することにより発塵することが知られている。
【0008】
この堆積物の飛散による発塵を避けるために、コロナ放電を利用しない方法として、軟X線を照射し、電物周辺の雰囲気をイオン化させ、静電気を中和させる方法が知られている(特許文献1)。
【0009】
また、コロナ放電式のイオナイザにおいて、電極針への特定の気体の流れを作り出すことにより、電極針先端への不純物の付着を防ぐ方法が提案されている(特許文献2)。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−194371号公報
【特許文献2】特開2009−070707号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、特許文献1記載のイオナイザの場合、軟X線に対する安全対策が必要となり、人がイオナイザに近づく場所や被除電物にアクセスする場所にインターロックを備えることが必要となる。また、特許文献2記載のイオナイザの場合、コロナ放電方式であるため、不純物の堆積を完全に無くして発塵をゼロにすることは困難である。
【0012】
本発明の目的は、コロナ放電を用いたイオナイザの電極針先端部に堆積した不純物がウェーハの表面に落下することを防ぐことにある。
【課題を解決するための手段】
【0013】
本発明のウェーハ除電装置は、プリアライナの上方を覆うカバーと、前記カバーの外周部又は外周部の下方に設置されたイオン供給部とを含み、前記イオン供給部のイオン供給口が前記カバーと前記プリアライナとの間の空間部に向けられていることを特徴とする。
【発明の効果】
【0014】
本発明によれば、イオナイザの電極針先端部に堆積した不純物がウェーハの表面に落下することを防ぎ、クリーンな環境下でウェーハ搬送を行うことができる。
【図面の簡単な説明】
【0015】
【図1】実施例1に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図2】従来のウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図3】実施例2に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図4】実施例3に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図5】実施例4に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図6】実施例5に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図7】実施例6に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図8】実施例7に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図9】実施例8に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す上面図である。
【図10】実施例9に係るウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す側面図である。
【図11】実施例1のウェーハ除電装置を示す下面図である。
【図12】ウェーハ除電装置の変形例を示す下面図である。
【図13】ウェーハ除電装置の変形例を示す下面図である。
【発明を実施するための形態】
【0016】
図2は、従来のウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す構成図である。
【0017】
ウェーハ搬送装置におけるウェーハの除電は、ウェーハ搬送装置の上部や本図に示すようにプリアライナ1の上部にイオナイザ24を設置し、イオナイザ24から空気イオンを発生させてウェーハ2の除電を行う。
【0018】
イオナイザ24には、空気イオンのイオン供給口25(吹き出し口)が設けられている。イオナイザ24と除電対象物との距離が近い方が除電の効率が高い。ウェーハ2全体を除電するため、プリアライナ1でウェーハ2を回転させるアライメント動作中に、イオナイザ24に設けたイオン吹き出し口25からイオン化された気体(空気イオン)を供給している。ここでは、空気イオンの流れを矢印26で示している。
【0019】
以下、本発明の一実施形態に係るウェーハ除電装置及びこれを備えたウェーハ搬送装置並びにウェーハの除電方法について説明する。
【0020】
前記ウェーハ除電装置は、プリアライナの上方を覆うカバーと、カバーの外周部又は外周部の下方に設置されたイオン供給部とを含み、イオン供給部のイオン供給口がカバーとプリアライナとの間の空間部に向けられている。
【0021】
前記ウェーハ除電装置において、イオン供給口は、プリアライナのウェーハ把持部に把持されるウェーハの外周部よりもウェーハの半径方向にウェーハの中心から離れた位置に設置されている。
【0022】
前記ウェーハ除電装置は、空間部に送風部を設けてある。
【0023】
前記ウェーハ除電装置は、ウェーハ把持部の上面よりも低い位置に送風部を設けてある。
【0024】
前記ウェーハ除電装置は、カバーをプリアライナの上方に配置した状態で回転させるための回転動力部を設けてある。
【0025】
前記ウェーハ除電装置は、カバーをプリアライナの上方から他の位置へ移動させるための駆動部を設けてある。
【0026】
前記ウェーハ除電装置は、ウェーハの回転を制御するための制御部を有し、この制御部は、イオン供給部から空気イオンを発生させた状態でウェーハを回転させる指令を発する。
【0027】
前記ウェーハ除電装置において、カバーは、光学的に透明な絶縁体で形成されている。
【0028】
前記ウェーハ搬送装置は、ウェーハ除電装置を備えている。
【0029】
前記ウェーハの除電方法は、プリアライナの上方を覆うカバーとプリアライナとの間の空間部に向けて空気イオンを供給し、送風部による送風、カバーの回転及びプリアライナのウェーハ把持部に把持されたウェーハの回転のうち少なくともいずれか1つを行うことにより空間部に気流を発生させるものである。
【0030】
前記ウェーハの除電方法において、ウェーハの回転は、プリアライメントの動作であってもよい。
【0031】
前記ウェーハの除電方法において、カバーをプリアライナの上方へ移動する動作は、ウェーハをウェーハ把持部に搬送した後に行い、カバーをプリアライナの上方から除去する動作は、プリアライメントの動作が終了した後に行うようにしてもよい。
【0032】
以下、実施例を用いて説明する。なお、プリアライナのウェーハ把持方式は、真空吸着方式、エッジチャック方式等を問わない。
【実施例1】
【0033】
図1は、ウェーハ搬送装置のプリアライナ及びウェーハ除電装置を示す構成図である。
【0034】
本図において、プリアライナ1は、ウェーハ2を把持するためのウェーハ把持部151を有し、プリアライナ1の上方には、プリアライナ1及びウェーハ2全体を覆うドーム状のカバー13が設置してある。カバー13の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送するときにカバー13に干渉することが無いようにするため、カバー13の一部を切り欠いている(図示せず)。
【0035】
本図において、カバー13については、断面を表している。カバー13は、光学的に透明な絶縁体(例えば、アクリル樹脂、ポリプロピレン等)で構成することにより、カバー13で覆われた状態でもウェーハ2を目視で確認することが可能となっている。
【0036】
イオナイザ14(イオン供給部)は、ウェーハ2の上方を覆っているカバー13の外周部に設置されている。イオナイザ14のイオン供給口15は、カバー13の中心方向(カバー13とプリアライナ1との間の空間部)を向いていて、ウェーハ2の上部からは離れた位置に置かれている。ここで、カバー13の「外周部」とは、ドーム状のカバー13の下端部付近であってカバー13に接した部位をいう。
【0037】
本実施例において、ウェーハ2の直径は300〜450mmであり、カバー13の直径は600〜800mmである。これらの寸法については、本実施例に限定されるものではない。
【0038】
イオナイザ14は、イオン供給口15から空気イオンを供給し、供給された空気イオンは、カバー13に覆われた内部に蓄積される。搬送ロボットによりプリアライナ1に搬送されたウェーハ2は、カバー13の下方に置かれている。カバー13の内側の空間(カバー13とプリアライナ1との間の空間部)に蓄積されていた空気イオンによって、ウェーハ2は除電される。
【0039】
また、アライナ1によってウェーハ2を回転することにより、カバー13の内側に空気の流れを発生させてもよい。カバー13の内側を漂っている空気イオンは、カバー13の内側に発生した気流に乗ってウェーハ2の上面へ運ばれる。このとき、ウェーハ2が回転しているため、空気イオンはウェーハ2の全面へ到達してウェーハ2全体が除電される。アライナ1によるウェーハ2の回転は、アライメント(プリアライメント)の動作として行ってもよい。
【0040】
一般に、イオナイザ14は、イオン供給口15から空気イオンと共にエアを噴射し、空気イオンをエアに乗せて除電対象物(ウェーハ2)まで運んでいる。本実施例においては、アライメント時のウェーハ2の回転により、カバー13の内側に気流が発生するため、イオナイザ14から供給された空気イオンは、イオナイザ14のイオン供給口15から噴射されるエアを利用しなくても、ウェーハ2上面まで運ばれる。ゆえに、イオナイザ14のイオン供給口15からエアを噴射しなくてもよい。
【0041】
そして、本実施例においては、イオナイザ14のイオン供給口25がウェーハ2の上方にないため、イオナイザ14のイオン供給口15にある電極針先端部に堆積した不純物がウェーハ2の上面に落下することがない。
【0042】
図11は、本実施例のウェーハ除電装置を示す下面図である。
【0043】
本図においては、カバー13の下端部の2か所にイオナイザ14が設置してある。イオナイザ14は、カバー13の線対称の位置に設置してある。それぞれのイオナイザ14には、イオン供給口15が4個設けてある。4個のイオン供給口15から同一種類の空気イオン、すなわち、正イオン又は負イオンを供給してもよく、4個のイオン供給口15から交互に異なる種類の空気イオン、すなわち、正イオン及び負イオンを供給してもよい。
【0044】
また、線対称のイオナイザ14の一方から正イオンを供給し、他方から負イオンを供給する構成としてもよい。
【0045】
さらに、それぞれのイオン供給口15から供給する空気イオンの正負を切り替えることができるようにしてもよい。
【0046】
図12は、ウェーハ除電装置の変形例を示す下面図である。
【0047】
本図の場合、カバー13は矩形状であり、1辺のみにイオナイザ14が設置してある。
【0048】
図13は、ウェーハ除電装置の変形例を示す下面図である。
【0049】
本図においては、カバー13は、円形状であり、カバー13の下端部の4か所にイオナイザ14が設置してある。4か所のイオナイザ14は、カバー13の中心を軸として90°間隔で設置してある。それぞれのイオナイザ14には、イオン供給口15が1個設けてある。
【実施例2】
【0050】
図3は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0051】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー33で覆われている。カバー33の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー33に干渉することが無いようにカバー33の一部を切り欠いている(図示せず)。
【0052】
本図において、カバー33については、断面を表している。また、カバー33には、貫通孔7が設けられており、貫通孔7は、設置場所、個数及び形状を問わない。
【0053】
イオナイザ34は、ウェーハ2の上方を覆っているカバー33の外周部に設置されている。イオナイザ34のイオン供給口35は、ウェーハ2の上方にはなく、カバー33の中心方向を向いている。イオナイザ34から供給された空気イオンは、カバー33の内側に蓄積される。
【0054】
カバー33の上方に設けられたFFU(ファン・フィルター・ユニット、図示せず)からのダウンフローにより、ウェーハ搬送装置には常に上から下への気流が供給されている。カバー33には、貫通孔7が設けられているため、そのカバー33の内側には、FFUのダウンフローの気流が貫通孔7から流れ込む。そのため、カバー33の内側に漂っている空気イオンは、貫通孔7から流れ込んできたFFUのダウンフローの気流に乗ってウェーハ2上面まで運ばれる。この時、ウェーハ2はアライメントのために回転しているため、イオナイザ34から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0055】
そして、イオナイザ34のイオン供給口35は、ウェーハ2の上方にないため、本実施例に示すウェーハ除電方法の場合、イオナイザ34のイオン供給口35にある電極針先端部に堆積した不純物がウェーハ2の上面に落下することがない。
【実施例3】
【0056】
図4は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0057】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー43で覆われている。カバー43の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー43に干渉することが無いようにカバー43の一部を切り欠いている(図示せず)。
【0058】
本図においては、カバー43については、断面を表している。イオナイザ44は、ウェーハ2の上方を覆っているカバー43の外周部に設置されており、イオナイザ44のイオン供給口45は、ウェーハ2の上方にはなく、カバー43の中心方向を向いている。イオナイザ44から供給された空気イオンは、カバー43の内側の空間に蓄積される。
【0059】
カバー43の内側には、ファン48(送風部)が設置されている。ファン48は、上下方向を軸とする軸流ファンである。
【0060】
ファン48の送風方向は、ファン48が正回転する場合、ウェーハ2の上面に向かうようになっている。このため、カバー43の内側から下に向かって気流が発生する。この気流により、イオナイザ44から供給された空気イオンは、ウェーハ2の上面まで運ばれる。イオナイザ44から供給された空気イオンがファン48から発生する気流に乗ってウェーハ2の上面に運ばれている時、ウェーハ2はアライメントのために回転している。このため、イオナイザ44から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0061】
また、ファン48は、常に稼働させる必要はない。搬送ロボットによりウェーハ2がプリアライナ1へ搬送される際、ウェーハ搬送装置からファン48に稼働の指令を出す。ウェーハ搬送装置からの稼働の指令を受け、ファン48が稼働する。ファン48から発生する気流により、カバー43の内側に漂っているイオナイザ44から供給されたイオンは、ウェーハ2の上面まで運ばれる。この時、ウェーハ2は、アライメントにより回転しているため、イオナイザ44から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置からファン48に稼働停止の指令を出す。ウェーハ搬送装置からの稼働停止の指令を受け、ファン48は稼働を停止する。
【0062】
さらに、ファン48の上部のカバー43には、開閉機構49が設けてある。開閉機構49は、カバー43に貫通孔を開け、その貫通孔を開閉させる機能を有する。通常、開閉機構49は閉状態で使用する。
【0063】
プリアライナ1にウェーハ2が把持されていない時、開閉機構49を開状態にしてファン48を逆回転させる。ファン48によりカバー43内側の空気は、貫通孔を通してカバー43の外部へ吐き出される。カバー43の内側にあった空気がカバー43の外部へ吐き出されることにより、カバー43の内側に向かって、下から上への気流が発生する。その気流により、更に多くの空気イオンが、カバー43の内側へ運ばれて空気イオンが供給される。その状態でファン48を正回転させると、更に多くのイオンがウェーハ2の全面に運ばれ、ウェーハ2の除電効率が向上する。
【実施例4】
【0064】
図5は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0065】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー53で覆われている。カバー53の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー53に干渉することが無いようにカバー53の一部を切り欠いている(図示せず)。
【0066】
本図において、カバー53については、断面を表している。イオナイザ54は、ウェーハ2上部を覆っているカバー53の外周部に設置されている。イオナイザ54のイオン供給口55は、ウェーハ2の上方にはなく、カバー53の中心方向を向いている。イオナイザ54から供給された空気イオンは、カバー53の内側の空間に蓄積される。
【0067】
ウェーハ2より下方にファン58が設置されている。ファン58は、上下方向を軸とする軸流ファンである。
【0068】
ファン58の送風は、ウェーハ搬送装置の下面に向かっており、カバー53の内側においては、ファン58に向かう気流が発生する。この気流により、カバー53の内側にある空気イオンは、ウェーハ2の上面に運ばれる。ファン58に向かう気流により、カバー53内側に漂っているイオナイザ54から供給された空気イオンがウェーハ2の上面に運ばれている時、ウェーハ2は、アライメントのために回転している。このため、イオナイザ54から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0069】
なお、ファン58は、常に稼働させる必要はない。搬送ロボットによりプリアライナ1へウェーハ2が搬送される際、ウェーハ搬送装置からファン58に稼働の指令を出す。ウェーハ搬送装置からの稼働指令により、ファン58は回転する。ファン58から発生する気流により、カバー53の内側にある空気イオンは、ウェーハ2の上面まで運ばれる。イオナイザ54から供給された空気イオンがファン58から発生する気流に乗ってウェーハ2上面に運ばれている時、ウェーハ2はアライメントのために回転している。このため、イオナイザ54から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2の全体が除電される。
【0070】
ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を受け取ると、ウェーハ搬送装置からファン58に稼働停止の指令が出される。ウェーハ搬送装置からの稼働停止の指令を受け、ファン58は稼働を停止する。アライメントの際においてだけファン58を稼働することにより、カバー53の内側にイオナイザ54から供給された空気イオンを蓄積される。ファン58から発生する気流により蓄積された空気イオンがウェーハ2の上面に移動するため、ウェーハ2の除電効率が向上する。
【実施例5】
【0071】
図6は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0072】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー63で覆われている。カバー63の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー63に干渉することが無いようにカバー63の一部を切り欠いている(図示せず)。
【0073】
本図において、カバー63については、断面を表している。イオナイザ64は、ウェーハ2の上方を覆っているカバー63の外周部に設置されている。イオナイザ64のイオン供給口65は、ウェーハ2の上方にはなく、カバー63の中心方向を向いている。イオナイザ64から供給された空気イオンは、カバー63の内側の空間に蓄積される。
【0074】
カバー63の上部には、モータ69(回転動力部)が設置してあり、このモータ63の回転によってカバー63を回転させる機構を設けている。モータ69の設置位置は、カバー63の上部の中心部が望ましい。カバー63の回転により、カバー63の内側に気流を発生させ、カバー63の内側にある空気イオンは、ウェーハ2の上面へ運ばれる。イオナイザ64から供給された空気イオンがウェーハ2の上面に運ばれている時、ウェーハ2は回転している。このため、イオナイザ64から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0075】
なお、カバー63を常に回転させる必要はない。搬送ロボットによりプリアライナ1へウェーハ2が搬送される際、ウェーハ搬送装置からモータ69に稼働の指令が出され、この指令によってモータ69が回転する。ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置からモータ69に稼働停止の指令が出され、この指令を受けてモータ69は稼働を停止する。アライメントの際においてだけカバー63を回転させることにより、カバー63の内側の空間にイオナイザ64から供給された空気イオンが蓄積される。カバー63の内側に発生する気流により、蓄積された空気イオンがウェーハ2の上面へ移動するため、ウェーハ2の除電効率が向上する。
【実施例6】
【0076】
図7は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0077】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー73で覆われている。カバー73の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー73に干渉することが無いようにカバー73の一部を切り欠いている(図示せず)。
【0078】
本図において、カバー73については、断面を表している。イオナイザ74は、ウェーハ2の上方を覆っているカバー73の外周部に設置されている。イオナイザ74のイオン供給口75は、ウェーハ2の上方にはなく、カバー73の中心方向を向いている。イオナイザ74から供給されたイオンは、カバー73の内側の空間に蓄積される。
【0079】
カバー73の上部には、モータ79が設置してあり、このモータ79の回転によりファン78を回転させる機構を設けている。ファン78は、円板の表面に複数の羽根を角度を持たせて(角度は直角でもよい。)設け、ドラム状にした多翼ファンであり、遠心ファンとして機能する。
【0080】
モータ79によりファン78を回転させると、ファン78の回転軸方向から空気が吸われ、ファン78の外周部から空気が吐き出される。その結果、ファン78の回転に伴って、カバー73の内側に気流が発生し、カバー73の内側にある空気イオンは、気流に乗ってウェーハ2上面まで運ばれる。この時、ウェーハ2は、アライメントにより回転しているため、イオナイザ74から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0081】
また、ファン78を常に回転させる必要はない。搬送ロボットによりプリアライナ1へウェーハ2が搬送される際、ウェーハ搬送装置からモータ79に稼働の指令が出され、それによりファン78が回転する。ウェーハ2のアライメントが終わり、ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置からモータ79に稼働停止の指令が出され、それによりファン78は稼働を停止する。アライメントの際においてだけファン78を回転させることにより、カバー73の内側の空間にイオナイザ74から供給された空気イオンが蓄積される。カバー73の内側に発生する気流により、蓄積された空気イオンがウェーハ2の上面へ移動するため、ウェーハ2の除電効率が向上する。
【実施例7】
【0082】
図8は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0083】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置されたドーム状のカバー83で覆われている。カバー83の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー83に干渉することが無いようにカバー83の一部を切り欠いている(図示せず)。
【0084】
プリアライナ1の上方に設置されているカバー83には、駆動部88を設け、カバー83を移動させることができるようにしてある。動作の方向を矢印87で示している。
【0085】
搬送ロボットによりウェーハ2がプリアライナ1へ搬送される際、駆動部88は、ウェーハ搬送装置からプリアライナ1の上方への移動指令を受ける。この移動指令により、カバー83はプリアライナ1の上方に移動する。
【0086】
この後、イオナイザ84から空気イオンを供給し、空気イオンがカバー83の内側の空間に蓄積される。そして、搬送ロボットによりプリアライナ1にウェーハ2が搬送される。カバー83の内側の空間に蓄積されている空気イオンは、カバー83の下方にあるウェーハ2に向かって移動し、ウェーハ2は除電される。イオナイザ84から供給された空気イオンがウェーハ2の上面に移動している時、ウェーハ2は回転しているため、イオナイザ84から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0087】
また、ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置から駆動部88にプリアライナ1の表面近傍からの移動指令を出す。この移動指令により、カバー83はプリアライナ1の表面近傍から移動する。アライメントの際においてだけカバー83がプリアライナ1の上方(表面近傍)へ移動することにより、アライメントの際を除いてプリアライナ1の周辺部におけるダウンフローが流れにくくなることを防ぐことができる。
【実施例8】
【0088】
図9は、プリアライナ及び除電装置の他の実施例を示す上面図である。
【0089】
本図においては、ウェーハ2を把持したプリアライナ1をその上方に設置されたドーム状のカバー93で覆うことができるようになっている(破線で示してある。)。カバー93の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー93に干渉することが無いようにカバー93の一部を切り欠いている(図示せず)。
【0090】
駆動部98を設けることにより、プリアライナ1の上方から水平方向に離れた位置に設置されているカバー93をプリアライナ1の上方へ移動することができるようにしている。動作の方向を矢印97で示している。
【0091】
搬送ロボットによりウェーハ2がプリアライナ1へ搬送される際、駆動部98は、プリアライナ1の上方への移動指令を受ける。この移動指令により、カバー93は、プリアライナ1の上方に移動する。カバー93がプリアライナ1の上方へ移動すると、イオナイザ94が空気イオンを供給し、空気イオンがカバー93の内側の空間に蓄積される。そして、搬送ロボットによってプリアライナ1にウェーハ2が搬送され、カバー93の内側に蓄積されている空気イオンは、カバー93の下方にあるウェーハ2に向かって移動し、ウェーハ2が除電される。イオナイザ94から供給された空気イオンがウェーハ2の上面に移動している時、ウェーハ2は回転しているため、イオナイザ94から供給された空気イオンは、ウェーハ2の全面へ到達し、ウェーハ2全体が除電される。
【0092】
また、ウェーハ2のアライメントが終わり、搬送ロボットがプリアライナ1からウェーハ2を取り出すと、ウェーハ搬送装置から駆動部98にプリアライナ1の上方からの移動指令を出す。この移動指令により、カバー93はプリアライナ1の上方から移動する。アライメントの際においてだけカバー93をプリアライナ1の上方へ移動することにより、プリアライナ1の周辺部のダウンフローがカバー93によって妨げられる状態を短時間とすることができる。
【実施例9】
【0093】
図10は、プリアライナ及び除電装置の他の実施例を示す構成図である。
【0094】
本図においては、ウェーハ2を把持したプリアライナ1がその上方に設置された円錐台状のカバー103で覆われている。カバー103の下端は、ウェーハ2の位置と同程度の高さになっている。カバー103の下端は、ウェーハ2の位置と同程度の高さになっている。なお、搬送ロボットがウェーハ2を搬送する際、カバー103に干渉することが無いようにカバー103の一部を切り欠いている(図示せず)。
【0095】
本図において、カバー103については、断面を表している。イオナイザ104は、ウェーハ2が形成する水平面より下方に設置され、イオナイザ104のイオン供給口105が斜め上方を向けられ、且つ、イオン供給口105がカバー103とウェーハ2との隙間に設置されている。空気イオンは、斜め上方に向けて供給される。
【0096】
イオナイザ104は、イオン供給口105から空気イオンと共にエアを供給することができるようになっている。すなわち、空気イオンは、エアとともにカバー103の内側の空間に運ばれるようになっている。空気イオンの流れは、矢印106で示している。イオン供給口105から供給された空気イオンを伴ったエアの気流は、カバー103の内壁に衝突して流れを変え、ウェーハ2の上面に向かうようになっている。この時、ウェーハ2はアライメントのために回転しているため、空気イオンは、ウェーハ2の全面に到達し、ウェーハ2全体が除電される。
【符号の説明】
【0097】
1:プリアライナ、2:ウェーハ、7:貫通孔、13、33、43、53、63、73、83、93、103:カバー、14、24、34、44、54、64、74、84、94、104:イオナイザ、15、25、35、45、55、65、75、105:イオン供給口、26、106:矢印、48、58、78:ファン、49:開閉機構、69、79:モータ、88、98:駆動部、151:ウェーハ把持部。
【特許請求の範囲】
【請求項1】
プリアライナの上方を覆うカバーと、前記カバーの外周部又は外周部の下方に設置されたイオン供給部とを含み、前記イオン供給部のイオン供給口が前記カバーと前記プリアライナとの間の空間部に向けられていることを特徴とするウェーハ除電装置。
【請求項2】
前記イオン供給口は、前記プリアライナのウェーハ把持部に把持されるウェーハの外周部よりも前記ウェーハの半径方向に前記ウェーハの中心から離れた位置に設置されていることを特徴とする請求項1記載のウェーハ除電装置。
【請求項3】
前記空間部に送風部を設けたことを特徴とする請求項1又は2に記載のウェーハ除電装置。
【請求項4】
前記ウェーハ把持部の上面よりも低い位置に送風部を設けたことを特徴とする請求項2記載のウェーハ除電装置。
【請求項5】
前記カバーを前記プリアライナの上方に配置した状態で回転させるための回転動力部を設けたことを特徴とする請求項1〜4のいずれか一項にウェーハ除電装置。
【請求項6】
前記カバーを前記プリアライナの上方から他の位置へ移動させるための駆動部を設けたことを特徴とする請求項1〜5のいずれか一項にウェーハ除電装置。
【請求項7】
前記ウェーハの回転を制御するための制御部を有し、前記制御部は、前記イオン供給部から空気イオンを発生させた状態で前記ウェーハを回転させる指令を発することを特徴とする請求項2〜6のいずれか一項にウェーハ除電装置。
【請求項8】
前記カバーは、光学的に透明な絶縁体で形成されていることを特徴とする請求項1〜7のいずれか一項にウェーハ除電装置。
【請求項9】
請求項1〜8のいずれか一項にウェーハ除電装置を備えたことを特徴とするウェーハ搬送装置。
【請求項10】
プリアライナの上方を覆うカバーとプリアライナとの間の空間部に向けて空気イオンを供給し、送風部による送風、前記カバーの回転及び前記プリアライナのウェーハ把持部に把持されたウェーハの回転のうち少なくともいずれか1つを行うことにより前記空間部に気流を発生させることを特徴とするウェーハの除電方法。
【請求項11】
前記ウェーハの回転は、プリアライメントの動作であることを特徴とする請求項10記載のウェーハの除電方法。
【請求項12】
前記カバーを前記プリアライナの上方へ移動する動作は、前記ウェーハを前記ウェーハ把持部に搬送した後に行い、前記カバーを前記プリアライナの上方から除去する動作は、前記プリアライメントの動作が終了した後に行うことを特徴とする請求項10又は11に記載のウェーハの除電方法。
【請求項1】
プリアライナの上方を覆うカバーと、前記カバーの外周部又は外周部の下方に設置されたイオン供給部とを含み、前記イオン供給部のイオン供給口が前記カバーと前記プリアライナとの間の空間部に向けられていることを特徴とするウェーハ除電装置。
【請求項2】
前記イオン供給口は、前記プリアライナのウェーハ把持部に把持されるウェーハの外周部よりも前記ウェーハの半径方向に前記ウェーハの中心から離れた位置に設置されていることを特徴とする請求項1記載のウェーハ除電装置。
【請求項3】
前記空間部に送風部を設けたことを特徴とする請求項1又は2に記載のウェーハ除電装置。
【請求項4】
前記ウェーハ把持部の上面よりも低い位置に送風部を設けたことを特徴とする請求項2記載のウェーハ除電装置。
【請求項5】
前記カバーを前記プリアライナの上方に配置した状態で回転させるための回転動力部を設けたことを特徴とする請求項1〜4のいずれか一項にウェーハ除電装置。
【請求項6】
前記カバーを前記プリアライナの上方から他の位置へ移動させるための駆動部を設けたことを特徴とする請求項1〜5のいずれか一項にウェーハ除電装置。
【請求項7】
前記ウェーハの回転を制御するための制御部を有し、前記制御部は、前記イオン供給部から空気イオンを発生させた状態で前記ウェーハを回転させる指令を発することを特徴とする請求項2〜6のいずれか一項にウェーハ除電装置。
【請求項8】
前記カバーは、光学的に透明な絶縁体で形成されていることを特徴とする請求項1〜7のいずれか一項にウェーハ除電装置。
【請求項9】
請求項1〜8のいずれか一項にウェーハ除電装置を備えたことを特徴とするウェーハ搬送装置。
【請求項10】
プリアライナの上方を覆うカバーとプリアライナとの間の空間部に向けて空気イオンを供給し、送風部による送風、前記カバーの回転及び前記プリアライナのウェーハ把持部に把持されたウェーハの回転のうち少なくともいずれか1つを行うことにより前記空間部に気流を発生させることを特徴とするウェーハの除電方法。
【請求項11】
前記ウェーハの回転は、プリアライメントの動作であることを特徴とする請求項10記載のウェーハの除電方法。
【請求項12】
前記カバーを前記プリアライナの上方へ移動する動作は、前記ウェーハを前記ウェーハ把持部に搬送した後に行い、前記カバーを前記プリアライナの上方から除去する動作は、前記プリアライメントの動作が終了した後に行うことを特徴とする請求項10又は11に記載のウェーハの除電方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−258731(P2011−258731A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−131558(P2010−131558)
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
[ Back to top ]