
コミュニケーションロボット
【課題】使用者がロボットに向けて発話するとき、使用者がより話し易く、より親しみを感じることができるコミュニケーションロボットを提供する。
【解決手段】使用者が発する話し言葉を検知する音声検知手段と、所定の応答反応を表出する反応表出手段とを有したコミュニケーションロボットに、使用者の話し言葉に反応して予め定められた複数パターンの応答反応を表出させる。このとき、話し言葉が通常表現であるか否かの判定、話し言葉が同意要求表現であるか否かの判定、話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定を実施し、判定結果に基づいて異なる応答反応を表出させる。
【解決手段】使用者が発する話し言葉を検知する音声検知手段と、所定の応答反応を表出する反応表出手段とを有したコミュニケーションロボットに、使用者の話し言葉に反応して予め定められた複数パターンの応答反応を表出させる。このとき、話し言葉が通常表現であるか否かの判定、話し言葉が同意要求表現であるか否かの判定、話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定を実施し、判定結果に基づいて異なる応答反応を表出させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知した音声から身体動作を生成するコミュニケーションロボットに関するものである。
【背景技術】
【0002】
人間とのコミュニケーションを目的としたコミュニケーションロボット(以下単に「ロボット」とも称す)の開発が進められている。この種のロボットには、言葉によるバーバルコミュニケーションを実施するにとどまらず、表情を変化させる、ジェスチャーを行うといった身体動作によるノンバーバルコミュニケーション(以下「聞き手動作」とも称す)を実施するものがある。
【0003】
このような聞き手動作を実施するロボットによると、人間がロボットに話しかけるとき、ロボットに聞く姿勢が形成される。このことにより、話し手である人間は、あたかも人間と話しているかのような自然なコミュニケーションを実感でき、物体に話しかけているという違和感を覚えることがない。そのため、ロボットに話しかけるとき、人間がより話し易くなるという所謂引き込み効果を奏することができる。このようなロボットが、例えば、非特許文献1に開示されている。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】渡辺富夫、「身体的コミュニケーションにおける引き込みと身体性 心が通う身体的コミュニケーションシステムE−COSMICの開発を通して」、「日本赤ちゃん学会」学会誌「ベビーサイエンス2002.Vol.2」 論文1、2003年5月発刊
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年、人とロボットの共生に係る研究が注目されている。即ち、病院等の公共施設、レストラン等の商業施設、学校等の教育施設、ゲームセンター等の娯楽施設、ケアセンター等の介護施設といった、社会における様々な人の生活環境において、人の知識獲得の手助けをしたり、人と共に労働したりするロボットの開発が広く行われている。
【0006】
本発明者らは、このような人と共生するロボットとして、人間の社会生活における感情的な面をサポートするロボットの開発を考えた。具体的には、社会生活によって人間が受けるストレスをロボットの動作によって解消することを考えた。
【0007】
本発明者らがストレスを解消する手段について調査した結果、愚痴を聴いてもらうことがストレスの解消に効果的であることが判明した。しかしながら、人がロボットに対して愚痴を言うとき、ロボットが従来の聞き手動作を実施したのでは、人は十分にストレスを解消することができなかった。
【0008】
このことにつき、以下のような理由が考えられる。一般的に愚痴をこぼすとき、話し手は、聴き手が相手の発言を傾聴するという態度を見せることにより、愚痴をこぼし易くなる。また、話し手は、聴き手が強く同意してくれることにより、わだかまりが消えて気持ちがよくなる。換言すると、愚痴を聴くとき、聴き手には、通常の会話を実施するときより、話し手に対して強い共感が求められる。
しかし、従来のロボットが実施する聞き手動作では、話し手である使用者に対し、発話内容に共感していることを十分に感じさせることができなかった。
【0009】
そこで本発明は、使用者がロボットに向けて発話するとき、使用者がより話し易く、より親しみを感じることができるコミュニケーションロボットの提供を課題とするものである。
【課題を解決するための手段】
【0010】
上記課題を解決するための本発明の一態様は、使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、当該音声判定手段は、前記話し言葉が通常表現であるか否かの判定、前記話し言葉が同意要求表現であるか否かの判定、前記話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定が可能であり、音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボットである。
【0011】
本発明の一態様では、話し言葉の内容を判定する音声判定手段を有しており、話し手である使用者の話し言葉が、どのような内容であるのかを判定することができる。そして、判定した話し言葉の内容に応じた適切な応答反応を表出することができる。例えば、使用者の会話の内容によって、相槌を打つ、同意する、より強く同意する等の動作を切り替えることができる。このことにより、ロボットの応答が人間(動物)の応答に近いものとなり、使用者との間により自然なコミュニケーションが成立する。このことにより、使用者がロボットに語りかけるとき、より話し易くなるという効果がある。
さらに、使用者の話の内容に応じた適切な応答反応を表出することにより、使用者に対し、「話し相手(ロボット)が自分の意見に強く共感していること」を感じさせることができる。具体的には、使用者が語りかけているとき、適切なタイミングで相槌を入れる等の所定の動作を実施すると、使用者は話し相手(ロボット)が自分の話しを傾聴しているように感じる。そして、所定の動作が、例えば首を縦に振るといった、承認や同意を示す動作であった場合、使用者は、話し相手(ロボット)が話しの内容に同意したかのように感じる。そして、使用者は、話し相手(ロボット)が自分の話しを熱心に聴き、同意してくれることから、話し相手(ロボット)が自分の意見に強く共感していると感じる。このことから、使用者が話し相手(ロボット)に対してより親しみを感じるという効果がある。
なお、ここでいうロボットとは、プログラムによって動作する有形の物体(機器、ハードウェア、人形)を含むものである。
【0012】
本発明の第二の態様は、使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、当該音声判定手段は、使用者が発する話し言葉の語尾の音又は語尾近傍の音、話し言葉の長さ、声の強度の少なくともいずれかの情報に基づいて話し言葉の内容がどのような内容であるかを判定し、音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボットである。
【0013】
本発明の第二の態様では、話し言葉の内容を判定する音声判定手段を有しており、使用者が発する話し言葉の語尾の音、語尾近傍の音、話し言葉の長さ、声の強度等の情報から、話し言葉の内容を判定することができる。そして、判定した話し言葉の内容に応じた適切な応答反応を表出することができる。即ち、上記した態様と同様に、話の内容によって応答反応を変えることで、ロボットの応答が人間の応答に近いものとなり、使用者との間により自然なコミュニケーションが成立する。このことにより、使用者がロボットに語りかけるとき、より話し易くなるという効果がある。
また、使用者の話の内容に応じた適切な応答反応を表出することにより、上記した態様と同様に、使用者に対して「話し相手(ロボット)が自分の意見に強く共感していること」を感じさせることができ、使用者に親しみを感じさせることができるという効果がある。
【0014】
本発明の第三の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の終助詞に基づいて、話し言葉の内容を判定することを特徴とする。
【0015】
本発明の第三の態様では、使用者が発する話し言葉の終助詞に基づいて話し言葉の内容を判定する。このことにより、文や句の全体から話し言葉の内容を判定する場合に比べて、ハードウェア実現が比較的容易なアルゴリズムで判定を実施することができる。また、文や句の全体から話し言葉の内容を判定しないので、実行時に素早く判定結果を得ることが可能となる。
なお、ここでいう終助詞とは、間投助詞を含むものであり、より具体的には、文や句の末尾について意味を付け加える品詞全般を含むものとする。さらに、英語、ドイツ語等の外国語において、付加疑問文の末尾の部分のような、文や句の末尾に付加されて意味を付け加える部分についても含むものとする。
【0016】
本発明の第四の態様は、上記した態様のコミュニケーションロボットにおいて、前記応答反応は、特定の動作の実施回数を変化させることで、異なる応答反応とするものであり、音声判定手段の判定結果に基づいて、前記特定の動作を実施する回数が変化することを特徴とする。
【0017】
本発明の第四の態様では、特定の動作の実施回数を変化させることで、異なる応答反応とする。つまり、同じ動作を繰り返すことにより、動作が示す意味に強弱をつける。例えば、ロボットが1回頷く動作を実施する場合と、ロボットが複数回頷く動作を実施する場合とでは、後者の方が強く同意していることを示すことができる。したがって、同じ動作の回数の違いによって、同意していることを表現する応答と、強く同意していることを表現する応答の2通りの応答を行うことができる。このように、特定の動作の実施回数を変化させることで、異なる応答反応とすると、使用者の話し言葉に対する応答反応がより人間の応答に近いものとなる。
【0018】
本発明の第五の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定することを特徴とする。
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
【0019】
本発明の第五の態様では、使用者が発する話し言葉の語尾が上記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定する。
使用者が日本語で発話し、話し言葉の語尾が上記の(1)〜(4)の語から選ばれた1又は2以上の語である場合、使用者が話した内容について同意を要求している可能性が十分に高い。したがって、このような場合に、話し言葉の内容が同意要求表現であると判定することで、話し言葉の内容を判定する判定動作の精度を高めることができる。
【0020】
本発明の第六の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定することを特徴とする。
(5)「だ」
(6)「や」
【0021】
本発明の第六の態様では、使用者が発する話し言葉の語尾が上記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定する。
使用者が日本語で発話し、話し言葉の語尾が上記の(5)及び(6)の語から選ばれた1又は2の語である場合、使用者が話した内容について断定している可能性が十分に高い。したがって、このような場合に、話し言葉の内容が断定表現であると判定することで、話し言葉の内容を判定する判定動作の精度を高めることができる。
【0022】
本発明の第七の態様は、上記した態様のコミュニケーションロボットにおいて、人又は動物を模した形状であることを特徴とする。
【0023】
本発明の第七の態様では、ロボットの形状が、一般的に人が親しみ易く、話しかけ易い人間や動物、又はそれらの特徴を誇張、強調して簡略化、省略化した形状となっている。このことにより、使用者がロボットに語りかけるとき、物体に話しかけているという使用者の違和感をより確実に解消でき、使用者がより話し易くなるという効果がある。
なお、ここでいう「人又は動物」には、映画、小説、漫画等の創作物等の実在しない登場人物、対称物を擬人化したものも含むものとする。
【0024】
本発明の第八の態様は、上記した態様のコミュニケーションロボットにおいて、前記応答反応は、下記の(1)〜(3)の動作から選ばれた1又は2以上の動作の複合であることを特徴する。
(1)頷く
(2)鳴く
(3)四股のいずれかを動かす
【0025】
本発明の第八の態様では、ロボットが、あたかも人や動物が行う動作のような応答反応を表出するため、使用者がロボットに語りかけるとき、使用者にあたかも人や動物に語りかけているような印象を与えることができる。このため、使用者は、物体に話しかけているという違和感を覚えることがなく、より話し易くなるという効果がある。
【0026】
本発明の第九の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定し、使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定し、使用者が発する話し言葉が同意要求表現及び断定表現でない場合、通常表現と判定するものであり、前記応答反応は、頷く動作の実施回数を変化させることで、異なる応答反応とするものであって、前記同意要求表現と判定された場合に実施する頷く動作の回数は、前記通常表現と判定された場合に実施する頷く動作の回数より多く、前記断定表現と判定された場合に実施する頷く動作の回数は、前記同意要求表現と判定された場合に実施する頷く動作の回数より多いことを特徴する。
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
(5)「だ」
(6)「や」
【0027】
本発明の第九の態様では、話し言葉の内容を判定する判定動作の高い精度で実施可能であり、判定した話し言葉の内容に基づいて、あたかも人間のような応答反応を表出する。より具体的には、話し言葉の内容によって、相槌を打つように少ない回数だけ頷いたり、強い同意を示すように何度も頷いたりする。このことにより、ロボットの応答が人間の応答により近いものとなり、使用者との間により自然なコミュニケーションが成立する。このことにより、使用者がロボットに語りかけるとき、より話し易くなるという効果がある。さらに、話し言葉の内容に即した応答反応を表出することにより、上記したように、使用者に対し、「話し相手(ロボット)が自分の意見に強く共感していること」を感じさせることができる。このことから、使用者が話し相手(ロボット)に対してより親しみを感じるという効果がある。
【発明の効果】
【0028】
本発明は、ロボットの応答が人間(動物)の応答に近いので、使用者との間により自然なコミュニケーションを成立させることができる。そのため、使用者がロボットに語りかけるとき、話し易くなるという効果がある。
また本発明は、使用者がロボットに語りかけたとき、ロボットが話の内容に応じた適切な応答反応を表出する。このことにより、使用者に対して、「話し相手(ロボット)が自分の意見に強く共感している」という印象を与えることができる。このことにより、使用者に、ロボットに対する親しみを感じさせることができるという効果がある。
【図面の簡単な説明】
【0029】
【図1】本発明の第1実施形態のロボットを示す斜視図である。
【図2】図1のロボットの電気的構成を示すブロック図である。
【図3】図1のロボットのコミュニケーション動作の動作手順を示すフローチャートである。
【図4】図1のロボットとは異なる実施形態に係るロボットを示す斜視図である。
【図5】図1,4のロボットとは異なる実施形態に係るロボットを示す斜視図である。
【発明を実施するための形態】
【0030】
以下さらに、本発明の各実施形態について説明するが、本発明はこれらの例に限定されるものではない。
【0031】
本発明の第1実施形態のロボット1(コミュニケーションロボット)は、使用者が話しかけると、話し言葉を発話情報として取得する。そして、取得した発話情報とメモリに記憶された行動プログラムに基づいて、規定のコミュニケーション動作を実施する。
【0032】
以下、このようなロボットについて詳細に説明する。
【0033】
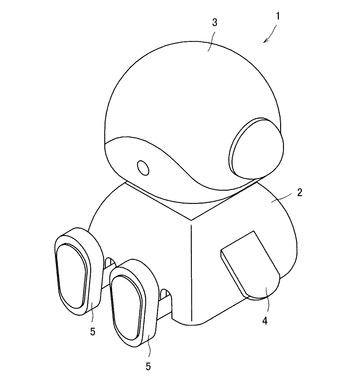
ロボット1は、図1で示されるように、人を模した形状であって、胴体2と、胴体2と一体に取り付けられた頭部3、手部4、足部5から構成されている。
【0034】
頭部3(反応表出手段)は、図示しないモータ、カム機構、クランク機構等から形成される機械構造部を介して、胴体2に取付けられている。そのため、頭部3は、胴体2に対して回動、姿勢を傾斜させる動作(応答反応)が可能となっている。即ち、頭部3は、頷く、首を振る等の動作が可能な状態で取付けられている。
【0035】
また、手部4、足部5も機械構造部を介して胴体2に取付けられており、胴体2に対して手部4の先端、足部5の先端が揺動可能となっている。即ち、手部4や足部5は、手を振る、足を上げる等の動作が可能な状態で取付けられている。
【0036】
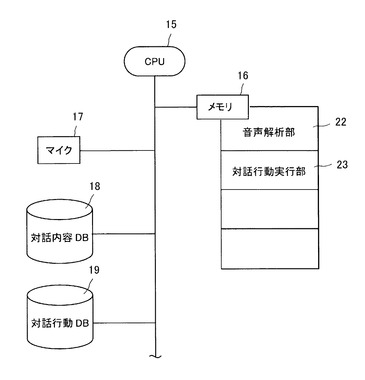
次に、ロボット1の電気的構成について、図2を参照しつつ説明する。
ロボット1は、CPU15、メモリ16、マイク17(音声検知手段)を備えており、これらはバスを介して接続されている。また、CPU15は、バスを介して対話内容DB18、対話行動DB19に接続している。
【0037】
CPU15は、周知のCPUであり、マイクロプロセッサとも称されるものであって、記憶装置上のプログラムを読み込み、実行することにより、情報の加工演算が可能なものである。
【0038】
メモリ16は、EPROMやEEPROMといったROM、DRAMやSDRAMといったRAMに加え、フラッシュメモリやHDDといった補助記憶装置又は二次記憶装置と称されるものを含む記憶装置であって、これらを1又は複数組み合わせて構成されている。メモリ16には、ロボット1の動作を制御するための音声解析部22,対話行動実行部23を主とする各種プログラム、データが記憶されている。なお、このメモリ16は、ハードディスク、フロッピーディスク(登録商標)、MO、CD、DVD、BD、磁気テープ等々の外部記憶装置とそれらの読取り装置によって構成してもよい。
【0039】
音声解析部22は、マイク17から送信された発話情報を表す信号と、後述する対話内容DB18に格納された情報に基づいて、発話情報の内容(表現の種類)を特定する機能を有する。
【0040】
対話行動実行部23は、音声解析部22によって特定された発話情報の内容(表現の種類)と、後述する対話内容DB18に格納された情報に基づいて、ロボット1に特定の動作を実行させる機能を有する。
【0041】
マイク17は、周知のマイクであって、外部音を集音して電気信号に変換可能なものである。
【0042】
対話内容DB18には、会話の語尾となり得る語と、表現の種類とが関連付けられて記憶されている。本実施形態では「ね」,「う」,「お」,「か」,「だ」,「や」の6つの語、及びこれらを末尾の語とする語(語句)を含む語の群と、「同意要求表現」,「断定表現」を含む表現の種類の群とが関連付けられて記憶されている。さらに具体的には、少なくとも、「ね」,「う」,「お」,「か」の4つの語、及びこれらを末尾の語とする語と「同意要求表現」とが関連付けられており、「だ」,「や」の2つの語、及びこれらを末尾の語とする語と「断定表現」とが関連づけられて記憶されている。
【0043】
対話行動DB19は、表現の種類とロボット1の動作とが関連付けられて記憶されている。本実施形態では「断定表現」,「同意要求表現」,「通常表現」を含む表現の種類の群と、「3回頷く」,「2回頷く」,「1回頷く」を含むロボット1の動作の群とが関連付けられて記憶されている。さらに具体的には、少なくとも、「断定表現」と「3回頷く」という動作、「同意要求表現」と「2回頷く」という動作、「通常表現」と「1回頷く」という動作が関連付けられて記憶されている。
【0044】
本発明のロボット1は、使用者が話しかけると、発話内容に応じてコミュニケーション動作を実施する。そして、このコミュニケーション動作によってロボット1の応答が人間の応答に近いものとなり、使用者とロボット1の間に自然なコミュニケーションが成立する。
本発明の特徴的動作たるコミュニケーション動作について、図3を参照しつつ、以下で詳細に説明する。
【0045】
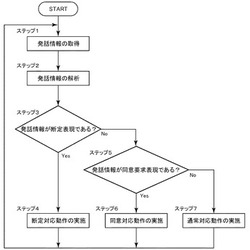
使用者がロボット1に対して話しかけると、ロボット1はマイク17によって音声を発話情報として取得する(ステップ1)。そして、CPU15は、マイク17から発話情報を表す信号が発せられたことを確認すると、音声解析部22による発話情報の解析を実行する(ステップ2)。即ち、発話情報を必要に応じて文毎に区切り、抽出した1文の内容のうち、語尾の音、又は語尾近傍の音を特定する。そして、特定した語尾の音、又は語尾近傍の音と、対話内容DB18に格納された情報とを比較する。
なお、発話情報を文毎に区切る場合、文と文の間の音声が発せられなかった時間や、発話情報における音の強弱(抑揚)、音声が発せられてからの時間等の情報に基づいて文を特定する。
【0046】
このとき、発話情報の語尾の音、又は語尾近傍の音が、「断定表現」に関連づけられた語であった場合(ステップ3でYesの場合)、CPU15は、対話行動実行部23による断定対応動作を実施する(ステップ4)。即ち、発話情報の内容が「断定表現」であるとされた音声解析部22による発話情報の解析結果と、対話行動DB19に格納された情報から、発話表現に対してロボット1が実行すべき行動を特定し、特定した行動をロボット1に実行させる。より具体的には、発話情報から特定した文を構成する文節、又は各音のうち、文の最も末尾に位置する文節、又は音と、対話行動DB19に格納された会話の語尾と成り得る語とを比較する。なお、本実施形態では、発話情報の内容が「断定表現」であることが特定された場合、ロボット1は「3回頷く」動作を実行する。
【0047】
対して、発話情報の語尾の音、又は語尾近傍の音が、「断定表現」に関連づけられた語でなく(ステップ3でNo)、「同意要求表現」に関連づけられた語であった場合(ステップ5でYesであった場合)、CPU15は、対話行動実行部23による同意対応動作を実施する(ステップ6)。即ち、上記した場合と同様に、音声解析部22による発話情報の解析結果と、対話行動DB19に格納された情報から、発話表現に対してロボット1が実行すべき行動を特定し、特定した行動をロボット1に実行させる。なお、本実施形態では、発話情報の内容が「同意要求表現」であることが特定された場合、ロボット1は「2回頷く」動作を実行する。
【0048】
またさらに、発話情報の語尾の音、又は語尾近傍の音が、「断定表現」に関連づけられた語でなく、「同意要求表現」に関連づけられた語でもなかった場合(ステップ3、ステップ5で共にNoであった場合)、CPU15は、対話行動実行部23による通常対応動作を実施する(ステップ7)。即ち、音声解析部22による発話情報の解析の結果、発話情報の内容が特定の動作を実行する必要のない通常のものであるとされた場合、発話情報の内容が「通常表現」であることが特定される。そして、特定された表現の種類と、対話行動DB19に格納された情報から、発話表現に対してロボット1が実行すべき行動を特定し、特定した行動をロボット1に実行させる。つまり、ロボット1に通常の発話に対する行動を実行させる。なお、本実施形態では、発話情報の内容が「通常表現」であることが特定された場合、ロボット1は「1回頷く」動作を実行する。
【0049】
このように、使用者が発話している間、ロボット1は、上記したステップ1からステップ7の動作を実行する。
【0050】
このようなコミュニケーション動作をロボット1が実行することにより、使用者とロボット1との間により自然なコミュニケーションが成立する。即ち、使用者は、機械に話しかけているという違和感が払拭され、相手(ロボット1)が自身の発言を傾聴しているという態度を視認できる。このため、使用者は、あたかもロボット1が自身の発話内容に共感しているように感じ、人に愚痴を聞いてもらったときと同様の状態となる。このことにより、使用者のストレスを解消できるという効果を奏することができる。
【0051】
以上でコミュニケーション動作についての説明を終了する。
【0052】
上記した実施形態の対話内容DB18,対話行動DB19の関連付け(テーブル構成)はあくまで一例であり、データベースに格納する情報の関連付け(テーブル構成)は、本発明の技術的思想を実現できる構成であれば、どのようなものでも構わない。
【0053】
したがって、データベースの数も2つに限るものではない。1つであっても、3つ以上の複数であってもよい。即ち、発話情報の末尾部分を構成する語、表現の種類、ロボットの行動といった、本発明の技術的思想を実現するために必要な情報が、関連づけられて記憶されていればよい。
【0054】
また、上記した実施形態では、語尾の音、又は語尾近傍の音と、表現の種類を関連づけて記憶させたが、本発明はこれに限るものではない。例えば、発話情報の長さ、声の強度、終助詞の少なくともいずれかと表現の種類とを関連づけて記憶させてもよい。即ち、発話情報を表す信号と記憶された情報から、発話情報の表現の種類が特定できればよい。
【0055】
上記した実施形態では、使用者が日本語の標準語でロボット1に話しかけることを想定してデータを構築したが、本発明はこれに限るものではない。例えば、表現の種類と関連付けられる語尾の音、又は語尾近傍の音は、外国語を想定したものであってよく、方言を想定したものであってもよい。即ち、本発明のロボット1は、日本語、外国語、又はそれらの方言のいずれか、又はすべてに対応するものであってよい。
【0056】
上記した実施形態では、ロボット1が使用者の発話内容に共感していることを、使用者自身に感じてもらうため、ロボット1が「断定表現」,「同意要求表現」,「通常表現」の順に強く同意する動作を実施した。即ち、「断定表現」,「同意要求表現」,「通常表現」の順に頷き(応答反応)の回数を多くして、同意の強弱を異ならしめた。しかしながら、本発明のロボットが実施するコミュニケーション動作は、これに限るものではない。例えば、「断定表現」、「同意要求表現」、「通常表現」のそれぞれに対して、異なる動作を実行して応答反応を異なるものとしてもよい。即ち、取得した発話情報と、予め記憶された基準となる情報に基づいて、必要な同意の強さを判定し、判定した結果に応じた応答反応が表出されればよい。
したがって、応答反応として実行する動作は、頷くといった頭部3を動かす動作だけでなく、手部4や足部5を動かす動作を実施してもよい。しかしながら、発話に対して頷く等の動作、即ち、人が他人の話を聴いたときに実際に取り得る動作をロボット1に実行させることが、使用者とロボットとのコミュニケーションがより自然となるため、望ましい。
【0057】
上記した実施形態では、ロボット1は人を模したものであったが、本発明はこれに限るものではない。例えば、図4で示されるように、より無機的な形状を有するロボット50であってもよい。即ち、頭部の形状は丸みを帯びた形状だけでなく、方形であってもよい。また、手部の先端の形状は略C字状の形状であってもよい。また、図5で示されるような、犬等の動物を模したロボット51であってもよい。この場合、応答動作は、鳴く、吠える、四肢を動かす、尻尾を動かす、耳を動かす等の動作であってよい。より具体的には、映画、小説、漫画等の創作物等の実在しない登場人物、対称物を擬人化したものであってもよい。しかし、人を模した形状であれば、使用者が違和感なく話しかけることができる効果がより高くなることが予測されるため、望ましい。
【符号の説明】
【0058】
1,50,51 ロボット(コミュニケーションロボット)
3 頭部(反応表出手段)
17 マイク(音声検知手段)
22 音声解析部(音声判定手段)
【技術分野】
【0001】
本発明は、検知した音声から身体動作を生成するコミュニケーションロボットに関するものである。
【背景技術】
【0002】
人間とのコミュニケーションを目的としたコミュニケーションロボット(以下単に「ロボット」とも称す)の開発が進められている。この種のロボットには、言葉によるバーバルコミュニケーションを実施するにとどまらず、表情を変化させる、ジェスチャーを行うといった身体動作によるノンバーバルコミュニケーション(以下「聞き手動作」とも称す)を実施するものがある。
【0003】
このような聞き手動作を実施するロボットによると、人間がロボットに話しかけるとき、ロボットに聞く姿勢が形成される。このことにより、話し手である人間は、あたかも人間と話しているかのような自然なコミュニケーションを実感でき、物体に話しかけているという違和感を覚えることがない。そのため、ロボットに話しかけるとき、人間がより話し易くなるという所謂引き込み効果を奏することができる。このようなロボットが、例えば、非特許文献1に開示されている。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】渡辺富夫、「身体的コミュニケーションにおける引き込みと身体性 心が通う身体的コミュニケーションシステムE−COSMICの開発を通して」、「日本赤ちゃん学会」学会誌「ベビーサイエンス2002.Vol.2」 論文1、2003年5月発刊
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年、人とロボットの共生に係る研究が注目されている。即ち、病院等の公共施設、レストラン等の商業施設、学校等の教育施設、ゲームセンター等の娯楽施設、ケアセンター等の介護施設といった、社会における様々な人の生活環境において、人の知識獲得の手助けをしたり、人と共に労働したりするロボットの開発が広く行われている。
【0006】
本発明者らは、このような人と共生するロボットとして、人間の社会生活における感情的な面をサポートするロボットの開発を考えた。具体的には、社会生活によって人間が受けるストレスをロボットの動作によって解消することを考えた。
【0007】
本発明者らがストレスを解消する手段について調査した結果、愚痴を聴いてもらうことがストレスの解消に効果的であることが判明した。しかしながら、人がロボットに対して愚痴を言うとき、ロボットが従来の聞き手動作を実施したのでは、人は十分にストレスを解消することができなかった。
【0008】
このことにつき、以下のような理由が考えられる。一般的に愚痴をこぼすとき、話し手は、聴き手が相手の発言を傾聴するという態度を見せることにより、愚痴をこぼし易くなる。また、話し手は、聴き手が強く同意してくれることにより、わだかまりが消えて気持ちがよくなる。換言すると、愚痴を聴くとき、聴き手には、通常の会話を実施するときより、話し手に対して強い共感が求められる。
しかし、従来のロボットが実施する聞き手動作では、話し手である使用者に対し、発話内容に共感していることを十分に感じさせることができなかった。
【0009】
そこで本発明は、使用者がロボットに向けて発話するとき、使用者がより話し易く、より親しみを感じることができるコミュニケーションロボットの提供を課題とするものである。
【課題を解決するための手段】
【0010】
上記課題を解決するための本発明の一態様は、使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、当該音声判定手段は、前記話し言葉が通常表現であるか否かの判定、前記話し言葉が同意要求表現であるか否かの判定、前記話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定が可能であり、音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボットである。
【0011】
本発明の一態様では、話し言葉の内容を判定する音声判定手段を有しており、話し手である使用者の話し言葉が、どのような内容であるのかを判定することができる。そして、判定した話し言葉の内容に応じた適切な応答反応を表出することができる。例えば、使用者の会話の内容によって、相槌を打つ、同意する、より強く同意する等の動作を切り替えることができる。このことにより、ロボットの応答が人間(動物)の応答に近いものとなり、使用者との間により自然なコミュニケーションが成立する。このことにより、使用者がロボットに語りかけるとき、より話し易くなるという効果がある。
さらに、使用者の話の内容に応じた適切な応答反応を表出することにより、使用者に対し、「話し相手(ロボット)が自分の意見に強く共感していること」を感じさせることができる。具体的には、使用者が語りかけているとき、適切なタイミングで相槌を入れる等の所定の動作を実施すると、使用者は話し相手(ロボット)が自分の話しを傾聴しているように感じる。そして、所定の動作が、例えば首を縦に振るといった、承認や同意を示す動作であった場合、使用者は、話し相手(ロボット)が話しの内容に同意したかのように感じる。そして、使用者は、話し相手(ロボット)が自分の話しを熱心に聴き、同意してくれることから、話し相手(ロボット)が自分の意見に強く共感していると感じる。このことから、使用者が話し相手(ロボット)に対してより親しみを感じるという効果がある。
なお、ここでいうロボットとは、プログラムによって動作する有形の物体(機器、ハードウェア、人形)を含むものである。
【0012】
本発明の第二の態様は、使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、当該音声判定手段は、使用者が発する話し言葉の語尾の音又は語尾近傍の音、話し言葉の長さ、声の強度の少なくともいずれかの情報に基づいて話し言葉の内容がどのような内容であるかを判定し、音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボットである。
【0013】
本発明の第二の態様では、話し言葉の内容を判定する音声判定手段を有しており、使用者が発する話し言葉の語尾の音、語尾近傍の音、話し言葉の長さ、声の強度等の情報から、話し言葉の内容を判定することができる。そして、判定した話し言葉の内容に応じた適切な応答反応を表出することができる。即ち、上記した態様と同様に、話の内容によって応答反応を変えることで、ロボットの応答が人間の応答に近いものとなり、使用者との間により自然なコミュニケーションが成立する。このことにより、使用者がロボットに語りかけるとき、より話し易くなるという効果がある。
また、使用者の話の内容に応じた適切な応答反応を表出することにより、上記した態様と同様に、使用者に対して「話し相手(ロボット)が自分の意見に強く共感していること」を感じさせることができ、使用者に親しみを感じさせることができるという効果がある。
【0014】
本発明の第三の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の終助詞に基づいて、話し言葉の内容を判定することを特徴とする。
【0015】
本発明の第三の態様では、使用者が発する話し言葉の終助詞に基づいて話し言葉の内容を判定する。このことにより、文や句の全体から話し言葉の内容を判定する場合に比べて、ハードウェア実現が比較的容易なアルゴリズムで判定を実施することができる。また、文や句の全体から話し言葉の内容を判定しないので、実行時に素早く判定結果を得ることが可能となる。
なお、ここでいう終助詞とは、間投助詞を含むものであり、より具体的には、文や句の末尾について意味を付け加える品詞全般を含むものとする。さらに、英語、ドイツ語等の外国語において、付加疑問文の末尾の部分のような、文や句の末尾に付加されて意味を付け加える部分についても含むものとする。
【0016】
本発明の第四の態様は、上記した態様のコミュニケーションロボットにおいて、前記応答反応は、特定の動作の実施回数を変化させることで、異なる応答反応とするものであり、音声判定手段の判定結果に基づいて、前記特定の動作を実施する回数が変化することを特徴とする。
【0017】
本発明の第四の態様では、特定の動作の実施回数を変化させることで、異なる応答反応とする。つまり、同じ動作を繰り返すことにより、動作が示す意味に強弱をつける。例えば、ロボットが1回頷く動作を実施する場合と、ロボットが複数回頷く動作を実施する場合とでは、後者の方が強く同意していることを示すことができる。したがって、同じ動作の回数の違いによって、同意していることを表現する応答と、強く同意していることを表現する応答の2通りの応答を行うことができる。このように、特定の動作の実施回数を変化させることで、異なる応答反応とすると、使用者の話し言葉に対する応答反応がより人間の応答に近いものとなる。
【0018】
本発明の第五の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定することを特徴とする。
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
【0019】
本発明の第五の態様では、使用者が発する話し言葉の語尾が上記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定する。
使用者が日本語で発話し、話し言葉の語尾が上記の(1)〜(4)の語から選ばれた1又は2以上の語である場合、使用者が話した内容について同意を要求している可能性が十分に高い。したがって、このような場合に、話し言葉の内容が同意要求表現であると判定することで、話し言葉の内容を判定する判定動作の精度を高めることができる。
【0020】
本発明の第六の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定することを特徴とする。
(5)「だ」
(6)「や」
【0021】
本発明の第六の態様では、使用者が発する話し言葉の語尾が上記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定する。
使用者が日本語で発話し、話し言葉の語尾が上記の(5)及び(6)の語から選ばれた1又は2の語である場合、使用者が話した内容について断定している可能性が十分に高い。したがって、このような場合に、話し言葉の内容が断定表現であると判定することで、話し言葉の内容を判定する判定動作の精度を高めることができる。
【0022】
本発明の第七の態様は、上記した態様のコミュニケーションロボットにおいて、人又は動物を模した形状であることを特徴とする。
【0023】
本発明の第七の態様では、ロボットの形状が、一般的に人が親しみ易く、話しかけ易い人間や動物、又はそれらの特徴を誇張、強調して簡略化、省略化した形状となっている。このことにより、使用者がロボットに語りかけるとき、物体に話しかけているという使用者の違和感をより確実に解消でき、使用者がより話し易くなるという効果がある。
なお、ここでいう「人又は動物」には、映画、小説、漫画等の創作物等の実在しない登場人物、対称物を擬人化したものも含むものとする。
【0024】
本発明の第八の態様は、上記した態様のコミュニケーションロボットにおいて、前記応答反応は、下記の(1)〜(3)の動作から選ばれた1又は2以上の動作の複合であることを特徴する。
(1)頷く
(2)鳴く
(3)四股のいずれかを動かす
【0025】
本発明の第八の態様では、ロボットが、あたかも人や動物が行う動作のような応答反応を表出するため、使用者がロボットに語りかけるとき、使用者にあたかも人や動物に語りかけているような印象を与えることができる。このため、使用者は、物体に話しかけているという違和感を覚えることがなく、より話し易くなるという効果がある。
【0026】
本発明の第九の態様は、上記した態様のコミュニケーションロボットにおいて、前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定し、使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定し、使用者が発する話し言葉が同意要求表現及び断定表現でない場合、通常表現と判定するものであり、前記応答反応は、頷く動作の実施回数を変化させることで、異なる応答反応とするものであって、前記同意要求表現と判定された場合に実施する頷く動作の回数は、前記通常表現と判定された場合に実施する頷く動作の回数より多く、前記断定表現と判定された場合に実施する頷く動作の回数は、前記同意要求表現と判定された場合に実施する頷く動作の回数より多いことを特徴する。
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
(5)「だ」
(6)「や」
【0027】
本発明の第九の態様では、話し言葉の内容を判定する判定動作の高い精度で実施可能であり、判定した話し言葉の内容に基づいて、あたかも人間のような応答反応を表出する。より具体的には、話し言葉の内容によって、相槌を打つように少ない回数だけ頷いたり、強い同意を示すように何度も頷いたりする。このことにより、ロボットの応答が人間の応答により近いものとなり、使用者との間により自然なコミュニケーションが成立する。このことにより、使用者がロボットに語りかけるとき、より話し易くなるという効果がある。さらに、話し言葉の内容に即した応答反応を表出することにより、上記したように、使用者に対し、「話し相手(ロボット)が自分の意見に強く共感していること」を感じさせることができる。このことから、使用者が話し相手(ロボット)に対してより親しみを感じるという効果がある。
【発明の効果】
【0028】
本発明は、ロボットの応答が人間(動物)の応答に近いので、使用者との間により自然なコミュニケーションを成立させることができる。そのため、使用者がロボットに語りかけるとき、話し易くなるという効果がある。
また本発明は、使用者がロボットに語りかけたとき、ロボットが話の内容に応じた適切な応答反応を表出する。このことにより、使用者に対して、「話し相手(ロボット)が自分の意見に強く共感している」という印象を与えることができる。このことにより、使用者に、ロボットに対する親しみを感じさせることができるという効果がある。
【図面の簡単な説明】
【0029】
【図1】本発明の第1実施形態のロボットを示す斜視図である。
【図2】図1のロボットの電気的構成を示すブロック図である。
【図3】図1のロボットのコミュニケーション動作の動作手順を示すフローチャートである。
【図4】図1のロボットとは異なる実施形態に係るロボットを示す斜視図である。
【図5】図1,4のロボットとは異なる実施形態に係るロボットを示す斜視図である。
【発明を実施するための形態】
【0030】
以下さらに、本発明の各実施形態について説明するが、本発明はこれらの例に限定されるものではない。
【0031】
本発明の第1実施形態のロボット1(コミュニケーションロボット)は、使用者が話しかけると、話し言葉を発話情報として取得する。そして、取得した発話情報とメモリに記憶された行動プログラムに基づいて、規定のコミュニケーション動作を実施する。
【0032】
以下、このようなロボットについて詳細に説明する。
【0033】
ロボット1は、図1で示されるように、人を模した形状であって、胴体2と、胴体2と一体に取り付けられた頭部3、手部4、足部5から構成されている。
【0034】
頭部3(反応表出手段)は、図示しないモータ、カム機構、クランク機構等から形成される機械構造部を介して、胴体2に取付けられている。そのため、頭部3は、胴体2に対して回動、姿勢を傾斜させる動作(応答反応)が可能となっている。即ち、頭部3は、頷く、首を振る等の動作が可能な状態で取付けられている。
【0035】
また、手部4、足部5も機械構造部を介して胴体2に取付けられており、胴体2に対して手部4の先端、足部5の先端が揺動可能となっている。即ち、手部4や足部5は、手を振る、足を上げる等の動作が可能な状態で取付けられている。
【0036】
次に、ロボット1の電気的構成について、図2を参照しつつ説明する。
ロボット1は、CPU15、メモリ16、マイク17(音声検知手段)を備えており、これらはバスを介して接続されている。また、CPU15は、バスを介して対話内容DB18、対話行動DB19に接続している。
【0037】
CPU15は、周知のCPUであり、マイクロプロセッサとも称されるものであって、記憶装置上のプログラムを読み込み、実行することにより、情報の加工演算が可能なものである。
【0038】
メモリ16は、EPROMやEEPROMといったROM、DRAMやSDRAMといったRAMに加え、フラッシュメモリやHDDといった補助記憶装置又は二次記憶装置と称されるものを含む記憶装置であって、これらを1又は複数組み合わせて構成されている。メモリ16には、ロボット1の動作を制御するための音声解析部22,対話行動実行部23を主とする各種プログラム、データが記憶されている。なお、このメモリ16は、ハードディスク、フロッピーディスク(登録商標)、MO、CD、DVD、BD、磁気テープ等々の外部記憶装置とそれらの読取り装置によって構成してもよい。
【0039】
音声解析部22は、マイク17から送信された発話情報を表す信号と、後述する対話内容DB18に格納された情報に基づいて、発話情報の内容(表現の種類)を特定する機能を有する。
【0040】
対話行動実行部23は、音声解析部22によって特定された発話情報の内容(表現の種類)と、後述する対話内容DB18に格納された情報に基づいて、ロボット1に特定の動作を実行させる機能を有する。
【0041】
マイク17は、周知のマイクであって、外部音を集音して電気信号に変換可能なものである。
【0042】
対話内容DB18には、会話の語尾となり得る語と、表現の種類とが関連付けられて記憶されている。本実施形態では「ね」,「う」,「お」,「か」,「だ」,「や」の6つの語、及びこれらを末尾の語とする語(語句)を含む語の群と、「同意要求表現」,「断定表現」を含む表現の種類の群とが関連付けられて記憶されている。さらに具体的には、少なくとも、「ね」,「う」,「お」,「か」の4つの語、及びこれらを末尾の語とする語と「同意要求表現」とが関連付けられており、「だ」,「や」の2つの語、及びこれらを末尾の語とする語と「断定表現」とが関連づけられて記憶されている。
【0043】
対話行動DB19は、表現の種類とロボット1の動作とが関連付けられて記憶されている。本実施形態では「断定表現」,「同意要求表現」,「通常表現」を含む表現の種類の群と、「3回頷く」,「2回頷く」,「1回頷く」を含むロボット1の動作の群とが関連付けられて記憶されている。さらに具体的には、少なくとも、「断定表現」と「3回頷く」という動作、「同意要求表現」と「2回頷く」という動作、「通常表現」と「1回頷く」という動作が関連付けられて記憶されている。
【0044】
本発明のロボット1は、使用者が話しかけると、発話内容に応じてコミュニケーション動作を実施する。そして、このコミュニケーション動作によってロボット1の応答が人間の応答に近いものとなり、使用者とロボット1の間に自然なコミュニケーションが成立する。
本発明の特徴的動作たるコミュニケーション動作について、図3を参照しつつ、以下で詳細に説明する。
【0045】
使用者がロボット1に対して話しかけると、ロボット1はマイク17によって音声を発話情報として取得する(ステップ1)。そして、CPU15は、マイク17から発話情報を表す信号が発せられたことを確認すると、音声解析部22による発話情報の解析を実行する(ステップ2)。即ち、発話情報を必要に応じて文毎に区切り、抽出した1文の内容のうち、語尾の音、又は語尾近傍の音を特定する。そして、特定した語尾の音、又は語尾近傍の音と、対話内容DB18に格納された情報とを比較する。
なお、発話情報を文毎に区切る場合、文と文の間の音声が発せられなかった時間や、発話情報における音の強弱(抑揚)、音声が発せられてからの時間等の情報に基づいて文を特定する。
【0046】
このとき、発話情報の語尾の音、又は語尾近傍の音が、「断定表現」に関連づけられた語であった場合(ステップ3でYesの場合)、CPU15は、対話行動実行部23による断定対応動作を実施する(ステップ4)。即ち、発話情報の内容が「断定表現」であるとされた音声解析部22による発話情報の解析結果と、対話行動DB19に格納された情報から、発話表現に対してロボット1が実行すべき行動を特定し、特定した行動をロボット1に実行させる。より具体的には、発話情報から特定した文を構成する文節、又は各音のうち、文の最も末尾に位置する文節、又は音と、対話行動DB19に格納された会話の語尾と成り得る語とを比較する。なお、本実施形態では、発話情報の内容が「断定表現」であることが特定された場合、ロボット1は「3回頷く」動作を実行する。
【0047】
対して、発話情報の語尾の音、又は語尾近傍の音が、「断定表現」に関連づけられた語でなく(ステップ3でNo)、「同意要求表現」に関連づけられた語であった場合(ステップ5でYesであった場合)、CPU15は、対話行動実行部23による同意対応動作を実施する(ステップ6)。即ち、上記した場合と同様に、音声解析部22による発話情報の解析結果と、対話行動DB19に格納された情報から、発話表現に対してロボット1が実行すべき行動を特定し、特定した行動をロボット1に実行させる。なお、本実施形態では、発話情報の内容が「同意要求表現」であることが特定された場合、ロボット1は「2回頷く」動作を実行する。
【0048】
またさらに、発話情報の語尾の音、又は語尾近傍の音が、「断定表現」に関連づけられた語でなく、「同意要求表現」に関連づけられた語でもなかった場合(ステップ3、ステップ5で共にNoであった場合)、CPU15は、対話行動実行部23による通常対応動作を実施する(ステップ7)。即ち、音声解析部22による発話情報の解析の結果、発話情報の内容が特定の動作を実行する必要のない通常のものであるとされた場合、発話情報の内容が「通常表現」であることが特定される。そして、特定された表現の種類と、対話行動DB19に格納された情報から、発話表現に対してロボット1が実行すべき行動を特定し、特定した行動をロボット1に実行させる。つまり、ロボット1に通常の発話に対する行動を実行させる。なお、本実施形態では、発話情報の内容が「通常表現」であることが特定された場合、ロボット1は「1回頷く」動作を実行する。
【0049】
このように、使用者が発話している間、ロボット1は、上記したステップ1からステップ7の動作を実行する。
【0050】
このようなコミュニケーション動作をロボット1が実行することにより、使用者とロボット1との間により自然なコミュニケーションが成立する。即ち、使用者は、機械に話しかけているという違和感が払拭され、相手(ロボット1)が自身の発言を傾聴しているという態度を視認できる。このため、使用者は、あたかもロボット1が自身の発話内容に共感しているように感じ、人に愚痴を聞いてもらったときと同様の状態となる。このことにより、使用者のストレスを解消できるという効果を奏することができる。
【0051】
以上でコミュニケーション動作についての説明を終了する。
【0052】
上記した実施形態の対話内容DB18,対話行動DB19の関連付け(テーブル構成)はあくまで一例であり、データベースに格納する情報の関連付け(テーブル構成)は、本発明の技術的思想を実現できる構成であれば、どのようなものでも構わない。
【0053】
したがって、データベースの数も2つに限るものではない。1つであっても、3つ以上の複数であってもよい。即ち、発話情報の末尾部分を構成する語、表現の種類、ロボットの行動といった、本発明の技術的思想を実現するために必要な情報が、関連づけられて記憶されていればよい。
【0054】
また、上記した実施形態では、語尾の音、又は語尾近傍の音と、表現の種類を関連づけて記憶させたが、本発明はこれに限るものではない。例えば、発話情報の長さ、声の強度、終助詞の少なくともいずれかと表現の種類とを関連づけて記憶させてもよい。即ち、発話情報を表す信号と記憶された情報から、発話情報の表現の種類が特定できればよい。
【0055】
上記した実施形態では、使用者が日本語の標準語でロボット1に話しかけることを想定してデータを構築したが、本発明はこれに限るものではない。例えば、表現の種類と関連付けられる語尾の音、又は語尾近傍の音は、外国語を想定したものであってよく、方言を想定したものであってもよい。即ち、本発明のロボット1は、日本語、外国語、又はそれらの方言のいずれか、又はすべてに対応するものであってよい。
【0056】
上記した実施形態では、ロボット1が使用者の発話内容に共感していることを、使用者自身に感じてもらうため、ロボット1が「断定表現」,「同意要求表現」,「通常表現」の順に強く同意する動作を実施した。即ち、「断定表現」,「同意要求表現」,「通常表現」の順に頷き(応答反応)の回数を多くして、同意の強弱を異ならしめた。しかしながら、本発明のロボットが実施するコミュニケーション動作は、これに限るものではない。例えば、「断定表現」、「同意要求表現」、「通常表現」のそれぞれに対して、異なる動作を実行して応答反応を異なるものとしてもよい。即ち、取得した発話情報と、予め記憶された基準となる情報に基づいて、必要な同意の強さを判定し、判定した結果に応じた応答反応が表出されればよい。
したがって、応答反応として実行する動作は、頷くといった頭部3を動かす動作だけでなく、手部4や足部5を動かす動作を実施してもよい。しかしながら、発話に対して頷く等の動作、即ち、人が他人の話を聴いたときに実際に取り得る動作をロボット1に実行させることが、使用者とロボットとのコミュニケーションがより自然となるため、望ましい。
【0057】
上記した実施形態では、ロボット1は人を模したものであったが、本発明はこれに限るものではない。例えば、図4で示されるように、より無機的な形状を有するロボット50であってもよい。即ち、頭部の形状は丸みを帯びた形状だけでなく、方形であってもよい。また、手部の先端の形状は略C字状の形状であってもよい。また、図5で示されるような、犬等の動物を模したロボット51であってもよい。この場合、応答動作は、鳴く、吠える、四肢を動かす、尻尾を動かす、耳を動かす等の動作であってよい。より具体的には、映画、小説、漫画等の創作物等の実在しない登場人物、対称物を擬人化したものであってもよい。しかし、人を模した形状であれば、使用者が違和感なく話しかけることができる効果がより高くなることが予測されるため、望ましい。
【符号の説明】
【0058】
1,50,51 ロボット(コミュニケーションロボット)
3 頭部(反応表出手段)
17 マイク(音声検知手段)
22 音声解析部(音声判定手段)
【特許請求の範囲】
【請求項1】
使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、
前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、
当該音声判定手段は、前記話し言葉が通常表現であるか否かの判定、前記話し言葉が同意要求表現であるか否かの判定、前記話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定が可能であり、
音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボット。
【請求項2】
使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、
前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、
当該音声判定手段は、使用者が発する話し言葉の語尾の音又は語尾近傍の音、話し言葉の長さ、声の強度の少なくともいずれかの情報に基づいて話し言葉の内容がどのような内容であるかを判定し、
音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボット。
【請求項3】
前記音声判定手段は、使用者が発する話し言葉の終助詞に基づいて、話し言葉の内容を判定することを特徴とする請求項1又は2に記載のコミュニケーションロボット。
【請求項4】
前記応答反応は、特定の動作の実施回数を変化させることで、異なる応答反応とするものであり、音声判定手段の判定結果に基づいて、前記特定の動作を実施する回数が変化することを特徴とする請求項1乃至3のいずれかに記載のコミュニケーションロボット。
【請求項5】
前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定することを特徴とする請求項1乃至4のいずれかに記載のコミュニケーションロボット。
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
【請求項6】
前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定することを特徴とする請求項1乃至5のいずれかに記載のコミュニケーションロボット。
(5)「だ」
(6)「や」
【請求項7】
人又は動物を模した形状であることを特徴とする請求項1乃至6のいずれかに記載のコミュニケーションロボット。
【請求項8】
前記応答反応は、下記の(1)〜(3)の動作から選ばれた1又は2以上の動作の複合であることを特徴する請求項7に記載のコミュニケーションロボット。
(1)頷く
(2)鳴く
(3)四股のいずれかを動かす
【請求項9】
前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定し、
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定し、
(5)「だ」
(6)「や」
使用者が発する話し言葉が同意要求表現及び断定表現でない場合、通常表現と判定するものであり、
前記応答反応は、頷く動作の実施回数を変化させることで、異なる応答反応とするものであって、
前記同意要求表現と判定された場合に実施する頷く動作の回数は、前記通常表現と判定された場合に実施する頷く動作の回数より多く、
前記断定表現と判定された場合に実施する頷く動作の回数は、前記同意要求表現と判定された場合に実施する頷く動作の回数より多いことを特徴する請求項8に記載のコミュニケーションロボット。
【請求項1】
使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、
前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、
当該音声判定手段は、前記話し言葉が通常表現であるか否かの判定、前記話し言葉が同意要求表現であるか否かの判定、前記話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定が可能であり、
音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボット。
【請求項2】
使用者が発する話し言葉を検知する音声検知手段と、使用者が視覚的及び/又は聴覚的に関知できる所定の応答反応を表出する反応表出手段とを有し、使用者の話し言葉に反応して反応表出手段が予め定められた複数パターンの応答反応を表出するコミュニケーションロボットであって、
前記音声検知手段が検知した話し言葉の内容を判定する音声判定手段を有し、
当該音声判定手段は、使用者が発する話し言葉の語尾の音又は語尾近傍の音、話し言葉の長さ、声の強度の少なくともいずれかの情報に基づいて話し言葉の内容がどのような内容であるかを判定し、
音声判定手段の判定結果に基づいて、異なる応答反応が表出されることを特徴とするコミュニケーションロボット。
【請求項3】
前記音声判定手段は、使用者が発する話し言葉の終助詞に基づいて、話し言葉の内容を判定することを特徴とする請求項1又は2に記載のコミュニケーションロボット。
【請求項4】
前記応答反応は、特定の動作の実施回数を変化させることで、異なる応答反応とするものであり、音声判定手段の判定結果に基づいて、前記特定の動作を実施する回数が変化することを特徴とする請求項1乃至3のいずれかに記載のコミュニケーションロボット。
【請求項5】
前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定することを特徴とする請求項1乃至4のいずれかに記載のコミュニケーションロボット。
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
【請求項6】
前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定することを特徴とする請求項1乃至5のいずれかに記載のコミュニケーションロボット。
(5)「だ」
(6)「や」
【請求項7】
人又は動物を模した形状であることを特徴とする請求項1乃至6のいずれかに記載のコミュニケーションロボット。
【請求項8】
前記応答反応は、下記の(1)〜(3)の動作から選ばれた1又は2以上の動作の複合であることを特徴する請求項7に記載のコミュニケーションロボット。
(1)頷く
(2)鳴く
(3)四股のいずれかを動かす
【請求項9】
前記音声判定手段は、使用者が発する話し言葉の語尾が下記の(1)〜(4)の語から選ばれた1又は2以上の語である場合に、同意要求表現と判定し、
(1)「ね」
(2)「う」
(3)「お」
(4)「か」
使用者が発する話し言葉の語尾が下記の(5)及び(6)の語から選ばれた1又は2の語である場合に、断定表現と判定し、
(5)「だ」
(6)「や」
使用者が発する話し言葉が同意要求表現及び断定表現でない場合、通常表現と判定するものであり、
前記応答反応は、頷く動作の実施回数を変化させることで、異なる応答反応とするものであって、
前記同意要求表現と判定された場合に実施する頷く動作の回数は、前記通常表現と判定された場合に実施する頷く動作の回数より多く、
前記断定表現と判定された場合に実施する頷く動作の回数は、前記同意要求表現と判定された場合に実施する頷く動作の回数より多いことを特徴する請求項8に記載のコミュニケーションロボット。
【図1】


【図2】
【図3】

【図4】

【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−86226(P2013−86226A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230562(P2011−230562)
【出願日】平成23年10月20日(2011.10.20)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 社団法人電子情報通信学会発行 「電子情報通信学会技術研究報告 IEICE Technical Report MVE2011−1−MVE2011−13 マルチメディア・仮想環境基礎」(平成23年5月6日発行)
【出願人】(504322611)学校法人 京都産業大学 (27)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 社団法人電子情報通信学会発行 「電子情報通信学会技術研究報告 IEICE Technical Report MVE2011−1−MVE2011−13 マルチメディア・仮想環境基礎」(平成23年5月6日発行)
【出願人】(504322611)学校法人 京都産業大学 (27)
【Fターム(参考)】
[ Back to top ]