
経路案内装置、経路案内方法、及び経路案内プログラム
【課題】走行経路とは異なる道路や、目的地とは異なる施設等に、誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる、経路案内装置を提供すること。
【解決手段】経路案内装置1は、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示するものであって、対象分岐の位置に対応する表示位置で経路表示を表示するディスプレイ20と、対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差を推定する距離誤差推定部41と、走行経路において、対象分岐に隣接する他の分岐が存在する場合、対象分岐と他の分岐との位置関係と、距離誤差推定部41により推定された距離誤差とに基づき、ディスプレイ20における経路表示の表示位置を補正する表示制御部43とを備える。
【解決手段】経路案内装置1は、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示するものであって、対象分岐の位置に対応する表示位置で経路表示を表示するディスプレイ20と、対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差を推定する距離誤差推定部41と、走行経路において、対象分岐に隣接する他の分岐が存在する場合、対象分岐と他の分岐との位置関係と、距離誤差推定部41により推定された距離誤差とに基づき、ディスプレイ20における経路表示の表示位置を補正する表示制御部43とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路案内装置、経路案内方法、及び経路案内プログラムに関する。
【背景技術】
【0002】
従来、車両の走行経路を案内するためのカーナビゲーション装置が用いられている。カーナビゲーション装置においては、GPS(Global Positioning System)やジャイロセンサ等を用いて特定した車両の現在位置を、地図上に重畳表示する。
【0003】
さらに、車両前方の実写画像をカメラを用いて取得し、自車が交差点等の案内点に近づくと、自車が進むべき進路を示す矢印画像を経路案内オブジェクトとして実写画像に重畳してディスプレイに表示させるカーナビゲーション装置も提案されている。例えば、実写画像における道路白線を検出することにより、実写画像における道路に一致するように経路案内オブジェクトをディスプレイに重畳表示させるナビゲーション装置が提案されている。このナビゲーション装置では、カメラによって取得した自車前方の実写画像の道路白線を検出し、その道路白線に沿って経路案内オブジェクトが表示されるように、道路白線の検出結果に基づき道路形状データを補正し、補正された道路形状データに基づき、経路案内オブジェクトを生成して画面に表示する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−309529号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年では、HUD(Head−Up Display)やHMD(Head Mounted Display)を用いて、車両の走行経路を示す矢印画像等の経路表示を運転者から見た実際の風景に重畳するように表示することも提案されている。このHUDやHMDを用いた表示においては、着座位置や座高が運転者に応じて異なっている事等に起因して、当該HUDやHMDに表示された矢印画像等の経路表示が運転者によって認識される位置が、その運転者毎に異なる場合があった。例えば、HUDにおいて同じ位置に表示された矢印画像が、ある運転者にとっては100m前方に存在するように認識され、他の運転者にとっては120m前方に存在するように認識される等の可能性があった。しかしながら、上述の如き従来の装置では、この認識距離の誤差を何ら考慮していなかったため、HUDやHMDを用いて経路案内を行った場合、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをしてしまう可能性があった。
【0006】
本発明は、上記に鑑みてなされたものであって、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる、経路案内装置、経路案内方法、及び経路案内プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、請求項1に記載の経路案内装置は、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内装置であって、前記対象分岐の位置に対応する表示位置で前記経路表示を表示する表示手段と、前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定手段と、前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定手段により推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御手段と、を備える。
【0008】
また、請求項2に記載の経路案内装置は、請求項1に記載の経路案内装置において、前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する。
【0009】
また、請求項3に記載の経路案内装置は、請求項1又は2に記載の経路案内装置において、前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両から遠い側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する。
【0010】
また、請求項4に記載の経路案内装置は、請求項2及び3に記載の経路案内装置において、前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側と、当該車両から遠い側との両方に位置する場合、当該車両が当該車両側の他の分岐を通過するまでは、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する。
【0011】
また、請求項5に記載の経路案内装置は、請求項4に記載の経路案内装置において、前記表示制御手段は、前記車両が当該車両側の他の分岐を通過した後、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する。
【0012】
また、請求項6に記載の経路案内装置は、請求項1から5のいずれか一項に記載の経路案内装置において、前記表示制御手段は、前記距離誤差が、前記対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、前記表示手段における前記経路表示の表示位置を補正する。
【0013】
また、請求項7に記載の経路案内装置は、請求項1から6のいずれか一項に記載の経路案内装置において、前記車両の現在位置を示す現在位置情報を取得する現在位置情報取得手段を備え、前記距離誤差推定手段は、前記現在位置情報によりに基づき示される当該車両の位置と実際の当該車両の位置との誤差と、前記運転者が前記経路表示を認識する際に生じる認識誤差との合計値を、前記距離誤差として推定する。
【0014】
また、請求項8に記載の経路案内方法は、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内方法であって、前記対象分岐の位置に対応する表示位置で前記経路表示を表示手段に表示する表示ステップと、前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定ステップと、前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定ステップで推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御ステップと、を含む。
【0015】
また、請求項9に記載の経路案内プログラムは、請求項8に記載の方法をコンピュータに実行させる。
【発明の効果】
【0016】
請求項1に記載の経路案内装置、請求項8に記載の経路案内方法、及び請求項9に記載の経路案内プログラムによれば、表示制御手段は、走行経路において、対象分岐に隣接する他の分岐が存在する場合、対象分岐と他の分岐との位置関係と、距離誤差推定手段により推定された対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差とに基づき、表示手段における経路表示の表示位置を補正するので、経路表示が表示位置とは異なる位置に表示されているように運転者に認識されたとしても、他の分岐への走行経路を示す経路表示であると誤って認識されることを防止でき、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる。
【0017】
また、請求項2に記載の経路案内装置によれば、表示制御手段は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側に位置する場合、表示手段における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0018】
また、請求項3に記載の経路案内装置によれば、表示制御手段は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両から遠い側に位置する場合、表示手段における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0019】
また、請求項4に記載の経路案内装置によれば、表示制御手段は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側と、車両から遠い側との両方に位置する場合、車両が当該車両側の他の分岐を通過するまでは、表示手段における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0020】
また、請求項5に記載の経路案内装置によれば、表示制御手段は、車両が当該車両側の他の分岐を通過した後、表示手段における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0021】
また、請求項6に記載の経路案内装置によれば、表示制御手段は、距離誤差が、対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、表示手段における経路表示の表示位置を補正するので、対象分岐と当該対象分岐に隣接する他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識され、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性がある場合に、これを一層確実に防止できる。
【0022】
また、請求項7に記載の経路案内装置によれば、距離誤差推定手段は、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差と、運転者が経路表示を認識する際に生じる認識誤差との合計値を、距離誤差として推定するので、距離誤差を一層正確に推定することができ、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることを一層確実に防止できる。
【図面の簡単な説明】
【0023】
【図1】実施の形態に係る経路案内装置を例示するブロック図である。
【図2】得点テーブルに格納されている情報を例示した表である。
【図3】誤差テーブルに格納されている情報を例示した表である。
【図4】経路案内処理のフローチャートである。
【図5】誤差判定処理のフローチャートである。
【図6】補正量設定処理のフローチャートである。
【図7】車両の走行経路と経路表示の表示位置とを例示した概要図である。
【図8】対象分岐よりも車両側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。
【図9】ディスプレイにおける経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。
【図10】対象分岐よりも車両側に位置している他の分岐を車両が通過した場合の経路表示の表示位置を概念的に示した平面図である。
【図11】対象分岐の位置に対応する表示位置で経路表示を表示させた場合における運転者の視界を例示した図である。
【図12】対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。
【図13】ディスプレイにおける経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。
【発明を実施するための形態】
【0024】
以下、本発明に係る経路案内装置、経路案内方法、及び経路案内プログラムの実施の形態について図面を参照しつつ詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
【0025】
(構成)
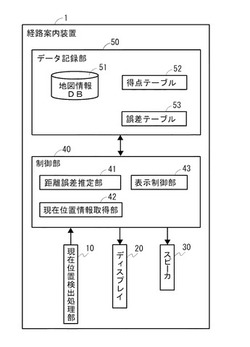
最初に、実施の形態に係る経路案内装置の構成について説明する。図1は、本実施の形態に係る経路案内装置を例示するブロック図である。経路案内装置1は車両に搭載されており、図1に示すように、現在位置検出処理部10、ディスプレイ20、スピーカ30、制御部40、及びデータ記録部50を備えている。
【0026】
(構成−現在位置検出処理部)
現在位置検出処理部10は、経路案内装置1が搭載された車両の現在位置を検出する現在位置検出手段である。具体的には、現在位置検出処理部10は、GPS、地磁気センサ、距離センサ、又はジャイロセンサ(いずれも図示省略)の少なくとも一つを有し、現在の自車両の位置(座標)及び方位等を公知の方法にて検出する。
【0027】
(構成−ディスプレイ)
ディスプレイ20は、車両の走行経路における案内対象である対象分岐の位置に対応する表示位置で、当該対象分岐を示す経路表示を運転者から見た実際の風景に重畳するように表示する表示手段である。なお「分岐」とは、車両が複数の方向に進行可能な地点を意味し、例えば右折や左折等が可能な交差点や、道路に面しているコンビニエンスストア等の施設への進入口等を含む。このディスプレイ20としては、例えばHUDやHMD等、運転者から見た実際の風景に重畳するように情報を表示する公知のディスプレイを用いることができる。
【0028】
(構成−スピーカ)
スピーカ30は、制御部40の制御に基づいて各種の音声を出力する出力手段である。スピーカ30より出力される音声の具体的な態様は任意であり、必要に応じて生成された合成音声や、予め録音された音声を出力することができる。
【0029】
(構成−制御部)
制御部40は、経路案内装置1を制御する制御手段であり、具体的には、CPU、当該CPU上で解釈実行される各種のプログラム(OSなどの基本制御プログラムや、OS上で起動され特定機能を実現するアプリケーションプログラムを含む)、及びプログラムや各種のデータを格納するためのRAMの如き内部メモリを備えて構成されるコンピュータである。特に、本実施の形態に係る経路案内プログラムは、任意の記録媒体又はネットワークを介して経路案内装置1にインストールされることで、制御部40の各部を実質的に構成する。
【0030】
この制御部40は、機能概念的に、距離誤差推定部41、現在位置情報取得部42、及び表示制御部43を備えている。距離誤差推定部41は、車両の走行経路における案内対象である対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差を推定する距離誤差推定手段である。現在位置情報取得部42は、車両の現在位置を示す現在位置情報を取得する現在位置情報取得手段である。表示制御部43は、ディスプレイ20における経路表示の表示位置を補正する表示制御手段である。これらの制御部40の各部によって実行される処理の詳細については後述する。
【0031】
(構成−データ記録部)
データ記録部50は、経路案内装置1の動作に必要なプログラム及び各種のデータを記録する記録手段であり、例えば、外部記憶装置としてのハードディスク(図示省略)の如き磁気的記録媒体を用いて構成されている。ただし、ハードディスクに代えてあるいはハードディスクと共に、フラッシュメモリの如き半導体型記憶媒体、又はDVDやブルーレイディスクの如き光学的記録媒体を含む、その他の任意の記録媒体を用いることができる。
【0032】
このデータ記録部50は、地図情報データベース51(以下、データベースをDBと略記する)、得点テーブル52、及び誤差テーブル53を備えている。
【0033】
地図情報DB51は、地図情報を格納する地図情報格納手段である。「地図情報」は、例えばリンクデータ(リンク番号、接続ノード番号、道路座標、道路種別、道路幅、車線数、走行規制等)、ノードデータ(ノード番号、座標)、地物データ(信号機、道路標識、ガードレール、建物等)、施設データ(各施設の位置、各施設の種別等)、地形データ、地図をディスプレイ20に表示するための地図表示データ等を含んで構成されている。
【0034】
得点テーブル52は、距離誤差推定部41が、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を推定する際に参照するテーブルである。図2は、得点テーブル52に格納されている情報を例示した表である。この図2に示すように、得点テーブル52には、項目「事例」及び「得点」に対応する情報が、相互に関連付けて格納されている。項目「事例」に対応して格納される情報は、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報の精度に影響を与える事例要因を示す情報である(図2では「道路上の地物を認識し位置補正直後」等)。項目「得点」に対応して格納される情報は、各事例が現在位置情報の精度に与える影響の度合を示す情報である(図2では「+50」等)。
【0035】
誤差テーブル53は、距離誤差推定部41が、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を推定する際に参照するテーブルである。図3は、誤差テーブル53に格納されている情報を例示した表である。この図3に示すように、誤差テーブル53には、項目「総得点」及び「現在位置情報の最大誤差」に対応する情報が、相互に関連付けて格納されている。項目「総得点」に対応して格納される情報は、現在位置情報の精度に影響を与える各事例の得点の総和の範囲を示す情報である(図3では「45点以上」等)。項目「現在位置情報の最大誤差」に対応して格納される情報は、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との間に生じ得る最大の誤差を示す情報である(図3では「1m」等)。
【0036】
(処理−経路案内処理)
次に、このように構成された経路案内装置1によって実行される経路案内処理について説明する。図4は、経路案内処理のフローチャートである(以下の各処理の説明ではステップを「S」と略記する)。この経路案内処理は、例えば、経路案内装置1に電源が投入された後、所定の周期にて繰り返し起動される。なお、経路案内処理を実行する前提として、公知の経路探索方法等を用いて経路案内装置1により車両の走行経路が設定されているものとする。
【0037】
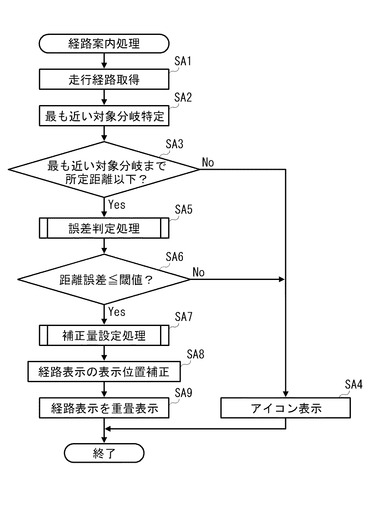
経路案内処理が開始されると、表示制御部43は、設定されている走行経路を取得する(SA1)。続いて表示制御部43は、当該取得した走行経路と、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報とに基づき、当該走行経路における案内対象である対象分岐の内、車両に最も近い対象分岐を特定する(SA2)。
【0038】
次に、表示制御部43は、SA2で特定した対象分岐までの距離が所定距離以下か否かを判定する(SA3)。この判定の基準となる「所定距離」は、対象分岐を示す経路表示の表示開始に適した距離であり、例えば300mが用いられる。
【0039】
その結果、対象分岐までの距離が所定距離以下ではない(対象分岐までの距離が所定距離より大きい)場合(SA3、No)、表示制御部43は、まだ対象分岐を示す経路表示を表示させるタイミングではないものとし、車両の走行経路において対象分岐がある旨を示すアイコンをディスプレイ20に表示させる(SA4)。その後、制御部40は経路案内処理を終了する。
【0040】
一方、対象分岐までの距離が所定距離以下である場合(SA3、Yes)、距離誤差推定部41は、誤差判定処理を実行する(SA5)。
【0041】
(処理−誤差判定処理)
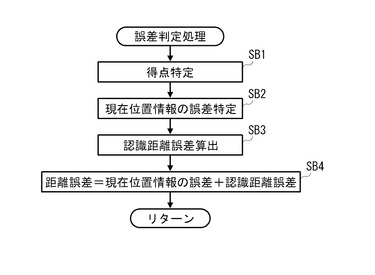
ここで、誤差判定処理について説明する。図5は、誤差判定処理のフローチャートである。図5に示すように、誤差判定処理が開始されると、距離誤差推定部41は、現在位置検出処理部10による車両の現在位置の検出状況に基づき、当該現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報の精度に影響を与える事例要因を特定し、当該事例要因に対応する得点を得点テーブル52に基づき特定する(SB1)。図2の例では、例えばGPSの受信状態が良好な状況で現在位置検出処理部10により車両の現在位置が検出された場合には、距離誤差判定部は、対応する得点は「+20」であると特定する。さらに、交差点の右左折直後に現在位置検出処理部10により車両の現在位置が検出された場合には、距離誤差判定部は、対応する得点が「+20」であると特定する。
【0042】
図5に戻り、距離誤差推定部41は、SB1で特定した得点の合計値に基づき、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を特定する(SB2)。すなわち、距離誤差推定部41は、SB1で特定した得点の合計値に対応する現在位置情報の最大誤差を、誤差テーブル53から取得する。例えばSB1で特定した得点の合計値が40点である場合、図3の例では、対応する現在位置情報の最大誤差は5mであると特定される。
【0043】
図5に戻り、距離誤差推定部41は、対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との認識距離誤差を推定する(SB3)。例えば、距離誤差推定部41は、車両から対象分岐までの距離に所定係数(例えば0.1)を乗じた値を認識距離誤差として算出する。
【0044】
続いて、距離誤差推定部41は、SB2で特定した現在位置情報の誤差と、SB3で推定した認識距離誤差との合計値を、対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差として算出する(SB4)。その後、距離誤差推定部41は誤差判定処理を終了し、メインルーチンに戻る。
【0045】
図4に戻り、表示制御部43は、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が閾値以下か否かを判定する(SA6)。この判定の基準となる閾値は、対象分岐を示す経路表示を運転者から見た実際の風景に重畳するように表示する場合において、ディスプレイ20における経路表示の表示位置を補正することで、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性を低減できる距離誤差の最大値に相当し、例えば40mが用いられる。
【0046】
その結果、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が閾値以下ではない(距離誤差が閾値より大きい)場合(SA6、No)、表示制御部43は、対象分岐を示す経路表示を運転者から見た実際の風景に重畳するように表示する場合において、ディスプレイ20における経路表示の表示位置を補正したとしても、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性があるものとし、車両の走行経路において対象分岐がある旨を示すアイコンをディスプレイ20に表示させる(SA4)。その後、制御部40は経路案内処理を終了する。
【0047】
一方、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が閾値以下である場合(SA6、Yes)、表示制御部43は、補正量設定処理を実行する(SA7)。
【0048】
(処理−補正量設定処理)
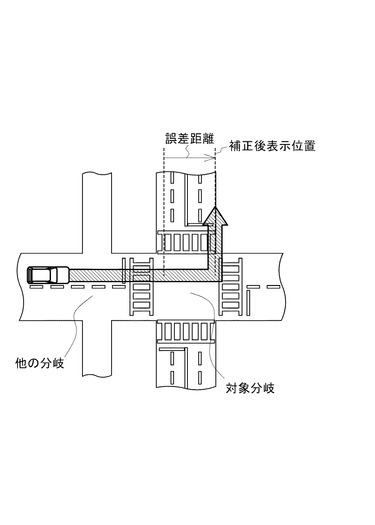
ここで、補正量設定処理について説明する。図6は、補正量設定処理のフローチャートである。図6に示すように、補正量設定処理が開始されると、表示制御部43は、車両の現在位置から、対象分岐を示す経路表示(例えば右左折等の走行経路を示す矢印)を表示すべき中心位置までの距離D1を算出する(SC1)。図7は、車両の走行経路と経路表示の表示位置とを例示した概要図である。経路表示を表示すべき中心位置としては、図7に示すように、例えば対象分岐(図7では中央の交差点)を旋回後の走行経路において、車両の現在位置に最も近い車線の中心が用いられる。例えば表示制御部43は、地図情報に含まれるノードデータに基づき、対象分岐に対応するノードの座標、対象分岐を旋回後の走行経路の道路幅、及び当該走行経路の車線数を特定する。そして、これらの特定結果と、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報とに基づき、車両の現在位置から、対象分岐を旋回後の走行経路において車両の現在位置に最も近い車線の中心までの距離D1を算出する。すなわち、図7の例では、車両の現在位置から対象分岐を示す経路表示を表示すべき中心位置までの距離D1は、車両の現在位置から対象分岐に対応するノード(図7では中央の交差点の中心)までの距離−((片側車線数−1)×車線幅+車線幅÷2)として算出される。
【0049】
図6に戻り、表示制御部43は、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在するか否かを判定する(SC2)。図7の例では、走行経路において対象分岐の交差点よりも車両側に他の交差点が存在することから、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在すると判定される。
【0050】
図6に戻り、SC2の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在する場合(SC2、Yes)、表示制御部43は、車両の現在位置から、他の分岐における対象分岐側の端部までの距離D2を算出する(SC3)。例えば表示制御部43は、地図情報に含まれるノードデータに基づき、対象分岐よりも車両側に位置している他の分岐に対応するノードの座標、及び当該他の分岐で走行経路に交差する交差道路の道路幅を特定する。そして、これらの特定結果と、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報とに基づき、車両の現在位置から、他の分岐における対象分岐側の端部までの距離D2を算出する。すなわち、図7の例では、走行経路において対象分岐の交差点よりも車両側に存在する他の交差点における、対象分岐側の端部までの距離D2は、車両の現在位置から当該他の交差点に対応するノード(図7では左側の交差点の中心)までの距離+道路幅÷2として算出される。
【0051】
図6に戻り、表示制御部43は、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離(図7の例ではD1−D2)の2分の1以上か否かを判定する(SC4)。すなわち、表示制御部43は、不等式(D1−D2)÷2≦距離誤差が成立するか否かを判定する。
【0052】
その結果、距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離の2分の1以上である場合(SC4、Yes)、すなわち、不等式(D1−D2)÷2≦距離誤差が成立する場合、表示制御部43は、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識される可能性があるものとし、車両から離れる方向に対象分岐から距離誤差に相当する距離を離す量(図6では「+距離誤差」)を、必要な補正量として設定する(SC5)。
【0053】
一方、SC2の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在しない場合(SC2、No)、又は、SC4の判定の結果、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離の2分の1以上ではない(2分の1未満である)場合、(SC4、No)、表示制御部43は、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在するか否かを判定する(SC6)。図7の例では、走行経路において対象分岐の交差点よりも車両から遠い側に他の交差点が存在することから、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在すると判定される。
【0054】
図6に戻り、SC6の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合(SC6、Yes)、表示制御部43は、車両の現在位置から、他の分岐における対象分岐側の端部までの距離D3を算出する(SC7)。図7の例では、走行経路において対象分岐の交差点よりも車両から遠い側に存在する他の交差点における、対象分岐側の端部までの距離D3は、車両の現在位置から当該他の交差点に対応するノード(図7では右側の交差点の中心)までの距離−道路幅÷2として算出される。
【0055】
図6に戻り、表示制御部43は、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離(図7の例ではD3−D1)の2分の1以上か否かを判定する(SC8)。すなわち、表示制御部43は、不等式(D3−D1)÷2≦距離誤差が成立するか否かを判定する。
【0056】
その結果、距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離の2分の1以上である場合(SC8、Yes)、すなわち、不等式(D3−D1)÷2≦距離誤差が成立する場合、表示制御部43は、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識される可能性があるものとし、対象分岐から車両側に距離誤差に相当する距離を離す量(図6では「−距離誤差」)を、必要な補正量として設定する(SC9)。
【0057】
また、SC6の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在しない場合(SC6、No)、又は、SC8の判定の結果、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離の2分の1以上ではない(2分の1未満である)場合、(SC8、No)、表示制御部43は、対象分岐よりも他の分岐に近い位置に経路表示が表示されていると運転者に認識される可能性は低いものとし、必要な補正量を0と設定する(SC10)。
【0058】
SC5、SC9、又はSC10の処理の後、表示制御部43は補正量設定処理を終了し、メインルーチンに戻る。
【0059】
図4に戻り、表示制御部43は、SA7の補正量設定処理で設定された補正量に基づき、ディスプレイ20における経路表示の表示位置を補正し(SA8)、当該補正後の表示位置で、対象分岐を示す経路表示を運転者から見た実際の風景に重畳するようにディスプレイ20に表示させる(SA9)。SA9の処理の後、制御部40は経路案内処理を終了する。
【0060】
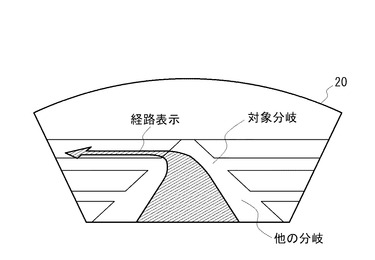
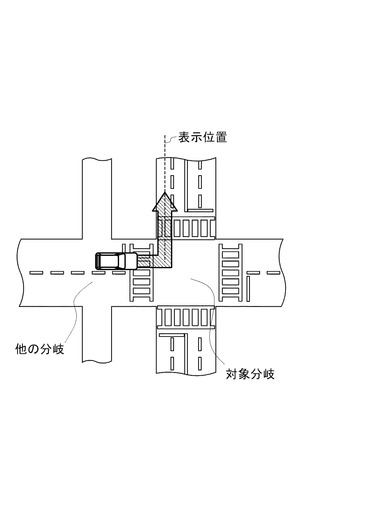
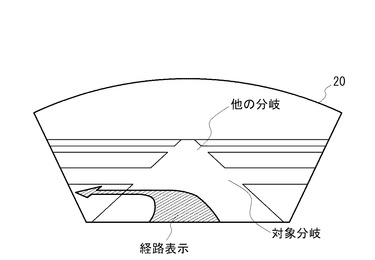
図8は、対象分岐よりも車両側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。図8に示すように、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在する場合において、距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離の2分の1以上である場合、図6のSC5において、表示制御部43は、車両から離れる方向に対象分岐から距離誤差に相当する距離を離す量を、必要な補正量として設定する。すなわち表示制御部43は、図8に示すように、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正する。図9は、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。なお図9では、フロントウィンドウの室内側において当該フロントウィンドウに重畳するようにディスプレイ20が設けられており、経路表示として案内矢印を運転者から見た実際の風景に重畳するように表示する場合を例示している(後述する図11及び図13についても同じ)。この図9に示すように、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正することにより、着座位置や座高が運転者に応じて異なっている事等に起因して、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0061】
また、図10は、対象分岐よりも車両側に位置している他の分岐を車両が通過した場合の経路表示の表示位置を概念的に示した平面図である。図10に示すように、対象分岐よりも車両側に位置している他の分岐を車両が通過した場合は、表示制御部43は補正量を0とし、対象分岐の位置に対応する表示位置で経路表示を表示させる。図11は、対象分岐の位置に対応する表示位置で経路表示を表示させた場合における運転者の視界を例示した図である。
【0062】
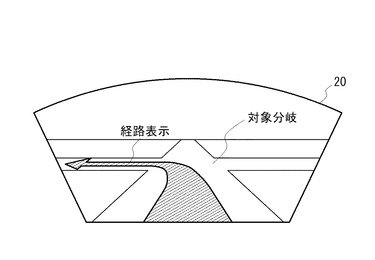
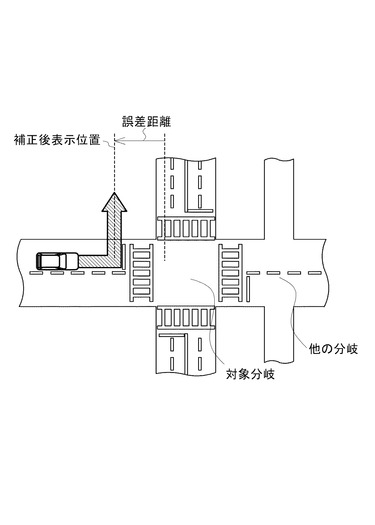
また、図12は、対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。図12に示すように、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合において、距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離の2分の1以上である場合、図6のSC9において、表示制御部43は、対象分岐から車両側に距離誤差に相当する距離を離す量を、必要な補正量として設定する。すなわち表示制御部43は、図12に示すように、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正する。図13は、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。この図13に示すように、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正することにより、着座位置や座高が運転者に応じて異なっている事等に起因して、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0063】
(効果)
このように本実施の形態によれば、表示制御部43は、走行経路において、対象分岐に隣接する他の分岐が存在する場合、対象分岐と他の分岐との位置関係と、距離誤差推定部41により推定された対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差とに基づき、ディスプレイ20における経路表示の表示位置を補正するので、経路表示が表示位置とは異なる位置に表示されているように運転者に認識されたとしても、他の分岐への走行経路を示す経路表示であると誤って認識されることを防止でき、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる。
【0064】
また、表示制御部43は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側に位置する場合、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0065】
また、表示制御部43は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両から遠い側に位置する場合、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0066】
特に、表示制御部43は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側と、車両から遠い側との両方に位置する場合、車両が当該車両側の他の分岐を通過するまでは、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0067】
また、表示制御部43は、車両が当該車両側の他の分岐を通過した後、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0068】
また、表示制御部43は、距離誤差が、対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、ディスプレイ20における経路表示の表示位置を補正するので、対象分岐と当該対象分岐に隣接する他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識され、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性がある場合に、これを一層確実に防止できる。
【0069】
また、距離誤差推定部41は、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差と、運転者が経路表示を認識する際に生じる認識誤差との合計値を、距離誤差として推定するので、距離誤差を一層正確に推定することができ、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることを一層確実に防止できる。
【0070】
〔実施の形態に対する変形例〕
以上、本発明に係る実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
【0071】
(解決しようとする課題や発明の効果について)
まず、発明が解決しようとする課題や発明の効果は、上述の内容に限定されるものではなく、発明の実施環境や構成の細部に応じて異なる可能性があり、上述した課題の一部のみを解決したり、上述した効果の一部のみを奏することがある。
【0072】
(適用対象について)
上述の実施の形態では、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する場合について説明したが、他の場合についても本発明を適用することができる。例えば、車両の走行経路におけるカーブを示す経路表示を運転者から見た実際の風景に重畳するように表示する場合においても、当該経路表示が実際の道路とは異なる位置に表示されているように運転者に認識される可能性があることから、これを防止するために本発明を適用することができる。
【0073】
(誤差判定処理について)
上述の実施の形態では、図5のSB1において、距離誤差推定部41は、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報の精度に影響を与える事例要因に対応する得点を得点テーブル52に基づき特定し、SB2において、SB1で特定した得点の合計値に対応する現在位置情報の最大誤差を、誤差テーブル53から取得すると説明したが、他の方法で現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を特定してもよい。例えば、現在位置情報の精度に影響を与える各事例の得点の総和の範囲を示す情報と、現在位置情報の確からしさを表す「自信度」を特定する情報とを相互に関連付けて格納する自信度テーブルをデータ記録部50に設ける。また、誤差テーブル53に、「自信度」を特定する情報と、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との間に生じ得る最大の誤差を示す情報とを、相互に関連付けて格納させる。そして、SB2において、距離誤差推定部41が、SB1で特定した得点の合計値に対応する「自信度」を自信度テーブルに基づき特定し、当該特定した自信度に対応する現在位置情報の最大誤差を、誤差テーブル53から取得するようにしてもよい。
【符号の説明】
【0074】
1 経路案内装置
10 現在位置検出処理部
20 ディスプレイ
30 スピーカ
40 制御部
41 距離誤差推定部
42 現在位置情報取得部
43 表示制御部
50 データ記録部
51 地図情報DB
52 得点テーブル
53 誤差テーブル
【技術分野】
【0001】
本発明は、経路案内装置、経路案内方法、及び経路案内プログラムに関する。
【背景技術】
【0002】
従来、車両の走行経路を案内するためのカーナビゲーション装置が用いられている。カーナビゲーション装置においては、GPS(Global Positioning System)やジャイロセンサ等を用いて特定した車両の現在位置を、地図上に重畳表示する。
【0003】
さらに、車両前方の実写画像をカメラを用いて取得し、自車が交差点等の案内点に近づくと、自車が進むべき進路を示す矢印画像を経路案内オブジェクトとして実写画像に重畳してディスプレイに表示させるカーナビゲーション装置も提案されている。例えば、実写画像における道路白線を検出することにより、実写画像における道路に一致するように経路案内オブジェクトをディスプレイに重畳表示させるナビゲーション装置が提案されている。このナビゲーション装置では、カメラによって取得した自車前方の実写画像の道路白線を検出し、その道路白線に沿って経路案内オブジェクトが表示されるように、道路白線の検出結果に基づき道路形状データを補正し、補正された道路形状データに基づき、経路案内オブジェクトを生成して画面に表示する(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−309529号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年では、HUD(Head−Up Display)やHMD(Head Mounted Display)を用いて、車両の走行経路を示す矢印画像等の経路表示を運転者から見た実際の風景に重畳するように表示することも提案されている。このHUDやHMDを用いた表示においては、着座位置や座高が運転者に応じて異なっている事等に起因して、当該HUDやHMDに表示された矢印画像等の経路表示が運転者によって認識される位置が、その運転者毎に異なる場合があった。例えば、HUDにおいて同じ位置に表示された矢印画像が、ある運転者にとっては100m前方に存在するように認識され、他の運転者にとっては120m前方に存在するように認識される等の可能性があった。しかしながら、上述の如き従来の装置では、この認識距離の誤差を何ら考慮していなかったため、HUDやHMDを用いて経路案内を行った場合、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをしてしまう可能性があった。
【0006】
本発明は、上記に鑑みてなされたものであって、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる、経路案内装置、経路案内方法、及び経路案内プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、請求項1に記載の経路案内装置は、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内装置であって、前記対象分岐の位置に対応する表示位置で前記経路表示を表示する表示手段と、前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定手段と、前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定手段により推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御手段と、を備える。
【0008】
また、請求項2に記載の経路案内装置は、請求項1に記載の経路案内装置において、前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する。
【0009】
また、請求項3に記載の経路案内装置は、請求項1又は2に記載の経路案内装置において、前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両から遠い側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する。
【0010】
また、請求項4に記載の経路案内装置は、請求項2及び3に記載の経路案内装置において、前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側と、当該車両から遠い側との両方に位置する場合、当該車両が当該車両側の他の分岐を通過するまでは、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する。
【0011】
また、請求項5に記載の経路案内装置は、請求項4に記載の経路案内装置において、前記表示制御手段は、前記車両が当該車両側の他の分岐を通過した後、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する。
【0012】
また、請求項6に記載の経路案内装置は、請求項1から5のいずれか一項に記載の経路案内装置において、前記表示制御手段は、前記距離誤差が、前記対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、前記表示手段における前記経路表示の表示位置を補正する。
【0013】
また、請求項7に記載の経路案内装置は、請求項1から6のいずれか一項に記載の経路案内装置において、前記車両の現在位置を示す現在位置情報を取得する現在位置情報取得手段を備え、前記距離誤差推定手段は、前記現在位置情報によりに基づき示される当該車両の位置と実際の当該車両の位置との誤差と、前記運転者が前記経路表示を認識する際に生じる認識誤差との合計値を、前記距離誤差として推定する。
【0014】
また、請求項8に記載の経路案内方法は、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内方法であって、前記対象分岐の位置に対応する表示位置で前記経路表示を表示手段に表示する表示ステップと、前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定ステップと、前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定ステップで推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御ステップと、を含む。
【0015】
また、請求項9に記載の経路案内プログラムは、請求項8に記載の方法をコンピュータに実行させる。
【発明の効果】
【0016】
請求項1に記載の経路案内装置、請求項8に記載の経路案内方法、及び請求項9に記載の経路案内プログラムによれば、表示制御手段は、走行経路において、対象分岐に隣接する他の分岐が存在する場合、対象分岐と他の分岐との位置関係と、距離誤差推定手段により推定された対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差とに基づき、表示手段における経路表示の表示位置を補正するので、経路表示が表示位置とは異なる位置に表示されているように運転者に認識されたとしても、他の分岐への走行経路を示す経路表示であると誤って認識されることを防止でき、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる。
【0017】
また、請求項2に記載の経路案内装置によれば、表示制御手段は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側に位置する場合、表示手段における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0018】
また、請求項3に記載の経路案内装置によれば、表示制御手段は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両から遠い側に位置する場合、表示手段における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0019】
また、請求項4に記載の経路案内装置によれば、表示制御手段は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側と、車両から遠い側との両方に位置する場合、車両が当該車両側の他の分岐を通過するまでは、表示手段における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0020】
また、請求項5に記載の経路案内装置によれば、表示制御手段は、車両が当該車両側の他の分岐を通過した後、表示手段における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0021】
また、請求項6に記載の経路案内装置によれば、表示制御手段は、距離誤差が、対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、表示手段における経路表示の表示位置を補正するので、対象分岐と当該対象分岐に隣接する他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識され、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性がある場合に、これを一層確実に防止できる。
【0022】
また、請求項7に記載の経路案内装置によれば、距離誤差推定手段は、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差と、運転者が経路表示を認識する際に生じる認識誤差との合計値を、距離誤差として推定するので、距離誤差を一層正確に推定することができ、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることを一層確実に防止できる。
【図面の簡単な説明】
【0023】
【図1】実施の形態に係る経路案内装置を例示するブロック図である。
【図2】得点テーブルに格納されている情報を例示した表である。
【図3】誤差テーブルに格納されている情報を例示した表である。
【図4】経路案内処理のフローチャートである。
【図5】誤差判定処理のフローチャートである。
【図6】補正量設定処理のフローチャートである。
【図7】車両の走行経路と経路表示の表示位置とを例示した概要図である。
【図8】対象分岐よりも車両側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。
【図9】ディスプレイにおける経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。
【図10】対象分岐よりも車両側に位置している他の分岐を車両が通過した場合の経路表示の表示位置を概念的に示した平面図である。
【図11】対象分岐の位置に対応する表示位置で経路表示を表示させた場合における運転者の視界を例示した図である。
【図12】対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。
【図13】ディスプレイにおける経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。
【発明を実施するための形態】
【0024】
以下、本発明に係る経路案内装置、経路案内方法、及び経路案内プログラムの実施の形態について図面を参照しつつ詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
【0025】
(構成)
最初に、実施の形態に係る経路案内装置の構成について説明する。図1は、本実施の形態に係る経路案内装置を例示するブロック図である。経路案内装置1は車両に搭載されており、図1に示すように、現在位置検出処理部10、ディスプレイ20、スピーカ30、制御部40、及びデータ記録部50を備えている。
【0026】
(構成−現在位置検出処理部)
現在位置検出処理部10は、経路案内装置1が搭載された車両の現在位置を検出する現在位置検出手段である。具体的には、現在位置検出処理部10は、GPS、地磁気センサ、距離センサ、又はジャイロセンサ(いずれも図示省略)の少なくとも一つを有し、現在の自車両の位置(座標)及び方位等を公知の方法にて検出する。
【0027】
(構成−ディスプレイ)
ディスプレイ20は、車両の走行経路における案内対象である対象分岐の位置に対応する表示位置で、当該対象分岐を示す経路表示を運転者から見た実際の風景に重畳するように表示する表示手段である。なお「分岐」とは、車両が複数の方向に進行可能な地点を意味し、例えば右折や左折等が可能な交差点や、道路に面しているコンビニエンスストア等の施設への進入口等を含む。このディスプレイ20としては、例えばHUDやHMD等、運転者から見た実際の風景に重畳するように情報を表示する公知のディスプレイを用いることができる。
【0028】
(構成−スピーカ)
スピーカ30は、制御部40の制御に基づいて各種の音声を出力する出力手段である。スピーカ30より出力される音声の具体的な態様は任意であり、必要に応じて生成された合成音声や、予め録音された音声を出力することができる。
【0029】
(構成−制御部)
制御部40は、経路案内装置1を制御する制御手段であり、具体的には、CPU、当該CPU上で解釈実行される各種のプログラム(OSなどの基本制御プログラムや、OS上で起動され特定機能を実現するアプリケーションプログラムを含む)、及びプログラムや各種のデータを格納するためのRAMの如き内部メモリを備えて構成されるコンピュータである。特に、本実施の形態に係る経路案内プログラムは、任意の記録媒体又はネットワークを介して経路案内装置1にインストールされることで、制御部40の各部を実質的に構成する。
【0030】
この制御部40は、機能概念的に、距離誤差推定部41、現在位置情報取得部42、及び表示制御部43を備えている。距離誤差推定部41は、車両の走行経路における案内対象である対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差を推定する距離誤差推定手段である。現在位置情報取得部42は、車両の現在位置を示す現在位置情報を取得する現在位置情報取得手段である。表示制御部43は、ディスプレイ20における経路表示の表示位置を補正する表示制御手段である。これらの制御部40の各部によって実行される処理の詳細については後述する。
【0031】
(構成−データ記録部)
データ記録部50は、経路案内装置1の動作に必要なプログラム及び各種のデータを記録する記録手段であり、例えば、外部記憶装置としてのハードディスク(図示省略)の如き磁気的記録媒体を用いて構成されている。ただし、ハードディスクに代えてあるいはハードディスクと共に、フラッシュメモリの如き半導体型記憶媒体、又はDVDやブルーレイディスクの如き光学的記録媒体を含む、その他の任意の記録媒体を用いることができる。
【0032】
このデータ記録部50は、地図情報データベース51(以下、データベースをDBと略記する)、得点テーブル52、及び誤差テーブル53を備えている。
【0033】
地図情報DB51は、地図情報を格納する地図情報格納手段である。「地図情報」は、例えばリンクデータ(リンク番号、接続ノード番号、道路座標、道路種別、道路幅、車線数、走行規制等)、ノードデータ(ノード番号、座標)、地物データ(信号機、道路標識、ガードレール、建物等)、施設データ(各施設の位置、各施設の種別等)、地形データ、地図をディスプレイ20に表示するための地図表示データ等を含んで構成されている。
【0034】
得点テーブル52は、距離誤差推定部41が、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を推定する際に参照するテーブルである。図2は、得点テーブル52に格納されている情報を例示した表である。この図2に示すように、得点テーブル52には、項目「事例」及び「得点」に対応する情報が、相互に関連付けて格納されている。項目「事例」に対応して格納される情報は、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報の精度に影響を与える事例要因を示す情報である(図2では「道路上の地物を認識し位置補正直後」等)。項目「得点」に対応して格納される情報は、各事例が現在位置情報の精度に与える影響の度合を示す情報である(図2では「+50」等)。
【0035】
誤差テーブル53は、距離誤差推定部41が、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を推定する際に参照するテーブルである。図3は、誤差テーブル53に格納されている情報を例示した表である。この図3に示すように、誤差テーブル53には、項目「総得点」及び「現在位置情報の最大誤差」に対応する情報が、相互に関連付けて格納されている。項目「総得点」に対応して格納される情報は、現在位置情報の精度に影響を与える各事例の得点の総和の範囲を示す情報である(図3では「45点以上」等)。項目「現在位置情報の最大誤差」に対応して格納される情報は、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との間に生じ得る最大の誤差を示す情報である(図3では「1m」等)。
【0036】
(処理−経路案内処理)
次に、このように構成された経路案内装置1によって実行される経路案内処理について説明する。図4は、経路案内処理のフローチャートである(以下の各処理の説明ではステップを「S」と略記する)。この経路案内処理は、例えば、経路案内装置1に電源が投入された後、所定の周期にて繰り返し起動される。なお、経路案内処理を実行する前提として、公知の経路探索方法等を用いて経路案内装置1により車両の走行経路が設定されているものとする。
【0037】
経路案内処理が開始されると、表示制御部43は、設定されている走行経路を取得する(SA1)。続いて表示制御部43は、当該取得した走行経路と、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報とに基づき、当該走行経路における案内対象である対象分岐の内、車両に最も近い対象分岐を特定する(SA2)。
【0038】
次に、表示制御部43は、SA2で特定した対象分岐までの距離が所定距離以下か否かを判定する(SA3)。この判定の基準となる「所定距離」は、対象分岐を示す経路表示の表示開始に適した距離であり、例えば300mが用いられる。
【0039】
その結果、対象分岐までの距離が所定距離以下ではない(対象分岐までの距離が所定距離より大きい)場合(SA3、No)、表示制御部43は、まだ対象分岐を示す経路表示を表示させるタイミングではないものとし、車両の走行経路において対象分岐がある旨を示すアイコンをディスプレイ20に表示させる(SA4)。その後、制御部40は経路案内処理を終了する。
【0040】
一方、対象分岐までの距離が所定距離以下である場合(SA3、Yes)、距離誤差推定部41は、誤差判定処理を実行する(SA5)。
【0041】
(処理−誤差判定処理)
ここで、誤差判定処理について説明する。図5は、誤差判定処理のフローチャートである。図5に示すように、誤差判定処理が開始されると、距離誤差推定部41は、現在位置検出処理部10による車両の現在位置の検出状況に基づき、当該現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報の精度に影響を与える事例要因を特定し、当該事例要因に対応する得点を得点テーブル52に基づき特定する(SB1)。図2の例では、例えばGPSの受信状態が良好な状況で現在位置検出処理部10により車両の現在位置が検出された場合には、距離誤差判定部は、対応する得点は「+20」であると特定する。さらに、交差点の右左折直後に現在位置検出処理部10により車両の現在位置が検出された場合には、距離誤差判定部は、対応する得点が「+20」であると特定する。
【0042】
図5に戻り、距離誤差推定部41は、SB1で特定した得点の合計値に基づき、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を特定する(SB2)。すなわち、距離誤差推定部41は、SB1で特定した得点の合計値に対応する現在位置情報の最大誤差を、誤差テーブル53から取得する。例えばSB1で特定した得点の合計値が40点である場合、図3の例では、対応する現在位置情報の最大誤差は5mであると特定される。
【0043】
図5に戻り、距離誤差推定部41は、対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との認識距離誤差を推定する(SB3)。例えば、距離誤差推定部41は、車両から対象分岐までの距離に所定係数(例えば0.1)を乗じた値を認識距離誤差として算出する。
【0044】
続いて、距離誤差推定部41は、SB2で特定した現在位置情報の誤差と、SB3で推定した認識距離誤差との合計値を、対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差として算出する(SB4)。その後、距離誤差推定部41は誤差判定処理を終了し、メインルーチンに戻る。
【0045】
図4に戻り、表示制御部43は、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が閾値以下か否かを判定する(SA6)。この判定の基準となる閾値は、対象分岐を示す経路表示を運転者から見た実際の風景に重畳するように表示する場合において、ディスプレイ20における経路表示の表示位置を補正することで、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性を低減できる距離誤差の最大値に相当し、例えば40mが用いられる。
【0046】
その結果、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が閾値以下ではない(距離誤差が閾値より大きい)場合(SA6、No)、表示制御部43は、対象分岐を示す経路表示を運転者から見た実際の風景に重畳するように表示する場合において、ディスプレイ20における経路表示の表示位置を補正したとしても、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性があるものとし、車両の走行経路において対象分岐がある旨を示すアイコンをディスプレイ20に表示させる(SA4)。その後、制御部40は経路案内処理を終了する。
【0047】
一方、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が閾値以下である場合(SA6、Yes)、表示制御部43は、補正量設定処理を実行する(SA7)。
【0048】
(処理−補正量設定処理)
ここで、補正量設定処理について説明する。図6は、補正量設定処理のフローチャートである。図6に示すように、補正量設定処理が開始されると、表示制御部43は、車両の現在位置から、対象分岐を示す経路表示(例えば右左折等の走行経路を示す矢印)を表示すべき中心位置までの距離D1を算出する(SC1)。図7は、車両の走行経路と経路表示の表示位置とを例示した概要図である。経路表示を表示すべき中心位置としては、図7に示すように、例えば対象分岐(図7では中央の交差点)を旋回後の走行経路において、車両の現在位置に最も近い車線の中心が用いられる。例えば表示制御部43は、地図情報に含まれるノードデータに基づき、対象分岐に対応するノードの座標、対象分岐を旋回後の走行経路の道路幅、及び当該走行経路の車線数を特定する。そして、これらの特定結果と、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報とに基づき、車両の現在位置から、対象分岐を旋回後の走行経路において車両の現在位置に最も近い車線の中心までの距離D1を算出する。すなわち、図7の例では、車両の現在位置から対象分岐を示す経路表示を表示すべき中心位置までの距離D1は、車両の現在位置から対象分岐に対応するノード(図7では中央の交差点の中心)までの距離−((片側車線数−1)×車線幅+車線幅÷2)として算出される。
【0049】
図6に戻り、表示制御部43は、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在するか否かを判定する(SC2)。図7の例では、走行経路において対象分岐の交差点よりも車両側に他の交差点が存在することから、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在すると判定される。
【0050】
図6に戻り、SC2の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在する場合(SC2、Yes)、表示制御部43は、車両の現在位置から、他の分岐における対象分岐側の端部までの距離D2を算出する(SC3)。例えば表示制御部43は、地図情報に含まれるノードデータに基づき、対象分岐よりも車両側に位置している他の分岐に対応するノードの座標、及び当該他の分岐で走行経路に交差する交差道路の道路幅を特定する。そして、これらの特定結果と、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報とに基づき、車両の現在位置から、他の分岐における対象分岐側の端部までの距離D2を算出する。すなわち、図7の例では、走行経路において対象分岐の交差点よりも車両側に存在する他の交差点における、対象分岐側の端部までの距離D2は、車両の現在位置から当該他の交差点に対応するノード(図7では左側の交差点の中心)までの距離+道路幅÷2として算出される。
【0051】
図6に戻り、表示制御部43は、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離(図7の例ではD1−D2)の2分の1以上か否かを判定する(SC4)。すなわち、表示制御部43は、不等式(D1−D2)÷2≦距離誤差が成立するか否かを判定する。
【0052】
その結果、距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離の2分の1以上である場合(SC4、Yes)、すなわち、不等式(D1−D2)÷2≦距離誤差が成立する場合、表示制御部43は、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識される可能性があるものとし、車両から離れる方向に対象分岐から距離誤差に相当する距離を離す量(図6では「+距離誤差」)を、必要な補正量として設定する(SC5)。
【0053】
一方、SC2の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在しない場合(SC2、No)、又は、SC4の判定の結果、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離の2分の1以上ではない(2分の1未満である)場合、(SC4、No)、表示制御部43は、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在するか否かを判定する(SC6)。図7の例では、走行経路において対象分岐の交差点よりも車両から遠い側に他の交差点が存在することから、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在すると判定される。
【0054】
図6に戻り、SC6の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合(SC6、Yes)、表示制御部43は、車両の現在位置から、他の分岐における対象分岐側の端部までの距離D3を算出する(SC7)。図7の例では、走行経路において対象分岐の交差点よりも車両から遠い側に存在する他の交差点における、対象分岐側の端部までの距離D3は、車両の現在位置から当該他の交差点に対応するノード(図7では右側の交差点の中心)までの距離−道路幅÷2として算出される。
【0055】
図6に戻り、表示制御部43は、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離(図7の例ではD3−D1)の2分の1以上か否かを判定する(SC8)。すなわち、表示制御部43は、不等式(D3−D1)÷2≦距離誤差が成立するか否かを判定する。
【0056】
その結果、距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離の2分の1以上である場合(SC8、Yes)、すなわち、不等式(D3−D1)÷2≦距離誤差が成立する場合、表示制御部43は、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識される可能性があるものとし、対象分岐から車両側に距離誤差に相当する距離を離す量(図6では「−距離誤差」)を、必要な補正量として設定する(SC9)。
【0057】
また、SC6の判定の結果、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在しない場合(SC6、No)、又は、SC8の判定の結果、SA5の誤差判定処理において距離誤差推定部41により推定された距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離の2分の1以上ではない(2分の1未満である)場合、(SC8、No)、表示制御部43は、対象分岐よりも他の分岐に近い位置に経路表示が表示されていると運転者に認識される可能性は低いものとし、必要な補正量を0と設定する(SC10)。
【0058】
SC5、SC9、又はSC10の処理の後、表示制御部43は補正量設定処理を終了し、メインルーチンに戻る。
【0059】
図4に戻り、表示制御部43は、SA7の補正量設定処理で設定された補正量に基づき、ディスプレイ20における経路表示の表示位置を補正し(SA8)、当該補正後の表示位置で、対象分岐を示す経路表示を運転者から見た実際の風景に重畳するようにディスプレイ20に表示させる(SA9)。SA9の処理の後、制御部40は経路案内処理を終了する。
【0060】
図8は、対象分岐よりも車両側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。図8に示すように、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両側に位置している他の分岐が存在する場合において、距離誤差が、対象分岐と当該対象分岐よりも車両側に位置している他の分岐との距離の2分の1以上である場合、図6のSC5において、表示制御部43は、車両から離れる方向に対象分岐から距離誤差に相当する距離を離す量を、必要な補正量として設定する。すなわち表示制御部43は、図8に示すように、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正する。図9は、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。なお図9では、フロントウィンドウの室内側において当該フロントウィンドウに重畳するようにディスプレイ20が設けられており、経路表示として案内矢印を運転者から見た実際の風景に重畳するように表示する場合を例示している(後述する図11及び図13についても同じ)。この図9に示すように、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正することにより、着座位置や座高が運転者に応じて異なっている事等に起因して、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0061】
また、図10は、対象分岐よりも車両側に位置している他の分岐を車両が通過した場合の経路表示の表示位置を概念的に示した平面図である。図10に示すように、対象分岐よりも車両側に位置している他の分岐を車両が通過した場合は、表示制御部43は補正量を0とし、対象分岐の位置に対応する表示位置で経路表示を表示させる。図11は、対象分岐の位置に対応する表示位置で経路表示を表示させた場合における運転者の視界を例示した図である。
【0062】
また、図12は、対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合における経路表示の補正後の表示位置を概念的に示した平面図である。図12に示すように、走行経路において対象分岐に隣接する他の分岐であって、対象分岐よりも車両から遠い側に位置している他の分岐が存在する場合において、距離誤差が、対象分岐と当該対象分岐よりも車両から遠い側に位置している他の分岐との距離の2分の1以上である場合、図6のSC9において、表示制御部43は、対象分岐から車両側に距離誤差に相当する距離を離す量を、必要な補正量として設定する。すなわち表示制御部43は、図12に示すように、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正する。図13は、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正した場合における、運転者の視界を例示した図である。この図13に示すように、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正することにより、着座位置や座高が運転者に応じて異なっている事等に起因して、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0063】
(効果)
このように本実施の形態によれば、表示制御部43は、走行経路において、対象分岐に隣接する他の分岐が存在する場合、対象分岐と他の分岐との位置関係と、距離誤差推定部41により推定された対象分岐の実際の位置と当該対象分岐を示す経路表示が運転者によって認識される位置との距離誤差とに基づき、ディスプレイ20における経路表示の表示位置を補正するので、経路表示が表示位置とは異なる位置に表示されているように運転者に認識されたとしても、他の分岐への走行経路を示す経路表示であると誤って認識されることを防止でき、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることがないように、運転者から見た実際の風景に対して経路表示を適切な位置に重畳表示することができる。
【0064】
また、表示制御部43は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側に位置する場合、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0065】
また、表示制御部43は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両から遠い側に位置する場合、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを防止できる。
【0066】
特に、表示制御部43は、対象分岐に隣接する他の分岐が、走行経路において対象分岐よりも車両側と、車両から遠い側との両方に位置する場合、車両が当該車両側の他の分岐を通過するまでは、ディスプレイ20における経路表示の表示位置を、車両から離れる方向に対象分岐から距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両側に表示されているように運転者に認識されたとしても、対象分岐よりも車両側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0067】
また、表示制御部43は、車両が当該車両側の他の分岐を通過した後、ディスプレイ20における経路表示の表示位置を、対象分岐から車両側に距離誤差離れた位置に対応する表示位置に補正するので、経路表示が表示位置よりも車両から離れる側に表示されているように運転者に認識されたとしても、対象分岐よりも車両から離れる側に位置している他の分岐への走行経路を示す経路表示であると誤って認識されることを一層確実に防止できる。
【0068】
また、表示制御部43は、距離誤差が、対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、ディスプレイ20における経路表示の表示位置を補正するので、対象分岐と当該対象分岐に隣接する他の分岐との中間点よりも当該他の分岐側に経路表示が表示されていると運転者に認識され、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをする可能性がある場合に、これを一層確実に防止できる。
【0069】
また、距離誤差推定部41は、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差と、運転者が経路表示を認識する際に生じる認識誤差との合計値を、距離誤差として推定するので、距離誤差を一層正確に推定することができ、走行経路とは異なる道路や目的地とは異なる施設等に誘導されているものと運転者が勘違いをすることを一層確実に防止できる。
【0070】
〔実施の形態に対する変形例〕
以上、本発明に係る実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
【0071】
(解決しようとする課題や発明の効果について)
まず、発明が解決しようとする課題や発明の効果は、上述の内容に限定されるものではなく、発明の実施環境や構成の細部に応じて異なる可能性があり、上述した課題の一部のみを解決したり、上述した効果の一部のみを奏することがある。
【0072】
(適用対象について)
上述の実施の形態では、車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する場合について説明したが、他の場合についても本発明を適用することができる。例えば、車両の走行経路におけるカーブを示す経路表示を運転者から見た実際の風景に重畳するように表示する場合においても、当該経路表示が実際の道路とは異なる位置に表示されているように運転者に認識される可能性があることから、これを防止するために本発明を適用することができる。
【0073】
(誤差判定処理について)
上述の実施の形態では、図5のSB1において、距離誤差推定部41は、現在位置検出処理部10を介して現在位置情報取得部42が取得した現在位置情報の精度に影響を与える事例要因に対応する得点を得点テーブル52に基づき特定し、SB2において、SB1で特定した得点の合計値に対応する現在位置情報の最大誤差を、誤差テーブル53から取得すると説明したが、他の方法で現在位置情報によりに基づき示される車両の位置と実際の車両の位置との誤差を特定してもよい。例えば、現在位置情報の精度に影響を与える各事例の得点の総和の範囲を示す情報と、現在位置情報の確からしさを表す「自信度」を特定する情報とを相互に関連付けて格納する自信度テーブルをデータ記録部50に設ける。また、誤差テーブル53に、「自信度」を特定する情報と、現在位置情報によりに基づき示される車両の位置と実際の車両の位置との間に生じ得る最大の誤差を示す情報とを、相互に関連付けて格納させる。そして、SB2において、距離誤差推定部41が、SB1で特定した得点の合計値に対応する「自信度」を自信度テーブルに基づき特定し、当該特定した自信度に対応する現在位置情報の最大誤差を、誤差テーブル53から取得するようにしてもよい。
【符号の説明】
【0074】
1 経路案内装置
10 現在位置検出処理部
20 ディスプレイ
30 スピーカ
40 制御部
41 距離誤差推定部
42 現在位置情報取得部
43 表示制御部
50 データ記録部
51 地図情報DB
52 得点テーブル
53 誤差テーブル
【特許請求の範囲】
【請求項1】
車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内装置であって、
前記対象分岐の位置に対応する表示位置で前記経路表示を表示する表示手段と、
前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定手段と、
前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定手段により推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御手段と、
を備える経路案内装置。
【請求項2】
前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する、
請求項1に記載の経路案内装置。
【請求項3】
前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両から遠い側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する、
請求項1又は2に記載の経路案内装置。
【請求項4】
前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側と、当該車両から遠い側との両方に位置する場合、当該車両が当該車両側の他の分岐を通過するまでは、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する、
請求項2及び3に記載の経路案内装置。
【請求項5】
前記表示制御手段は、前記車両が当該車両側の他の分岐を通過した後、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する、
請求項4に記載の経路案内装置。
【請求項6】
前記表示制御手段は、前記距離誤差が、前記対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、前記表示手段における前記経路表示の表示位置を補正する、
請求項1から5のいずれか一項に記載の経路案内装置。
【請求項7】
前記車両の現在位置を示す現在位置情報を取得する現在位置情報取得手段を備え、
前記距離誤差推定手段は、前記現在位置情報によりに基づき示される当該車両の位置と実際の当該車両の位置との誤差と、前記運転者が前記経路表示を認識する際に生じる認識誤差との合計値を、前記距離誤差として推定する、
請求項1から6のいずれか一項に記載の経路案内装置。
【請求項8】
車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内方法であって、
前記対象分岐の位置に対応する表示位置で前記経路表示を表示手段に表示する表示ステップと、
前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定ステップと、
前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定ステップで推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御ステップと、
を含む経路案内方法。
【請求項9】
請求項8に記載の方法をコンピュータに実行させる経路案内プログラム。
【請求項1】
車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内装置であって、
前記対象分岐の位置に対応する表示位置で前記経路表示を表示する表示手段と、
前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定手段と、
前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定手段により推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御手段と、
を備える経路案内装置。
【請求項2】
前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する、
請求項1に記載の経路案内装置。
【請求項3】
前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両から遠い側に位置する場合、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する、
請求項1又は2に記載の経路案内装置。
【請求項4】
前記表示制御手段は、前記対象分岐に隣接する他の分岐が、前記走行経路において当該対象分岐よりも前記車両側と、当該車両から遠い側との両方に位置する場合、当該車両が当該車両側の他の分岐を通過するまでは、前記表示手段における当該経路表示の表示位置を、当該車両から離れる方向に当該対象分岐から前記距離誤差離れた位置に対応する表示位置に補正する、
請求項2及び3に記載の経路案内装置。
【請求項5】
前記表示制御手段は、前記車両が当該車両側の他の分岐を通過した後、前記表示手段における当該経路表示の表示位置を、当該対象分岐から当該車両側に前記距離誤差離れた位置に対応する表示位置に補正する、
請求項4に記載の経路案内装置。
【請求項6】
前記表示制御手段は、前記距離誤差が、前記対象分岐と当該対象分岐に隣接する他の分岐との距離の2分の1以上である場合に、前記表示手段における前記経路表示の表示位置を補正する、
請求項1から5のいずれか一項に記載の経路案内装置。
【請求項7】
前記車両の現在位置を示す現在位置情報を取得する現在位置情報取得手段を備え、
前記距離誤差推定手段は、前記現在位置情報によりに基づき示される当該車両の位置と実際の当該車両の位置との誤差と、前記運転者が前記経路表示を認識する際に生じる認識誤差との合計値を、前記距離誤差として推定する、
請求項1から6のいずれか一項に記載の経路案内装置。
【請求項8】
車両の走行経路における案内対象である対象分岐を示す経路表示を、運転者から見た実際の風景に重畳するように表示する経路案内方法であって、
前記対象分岐の位置に対応する表示位置で前記経路表示を表示手段に表示する表示ステップと、
前記対象分岐の実際の位置と当該対象分岐を示す経路表示が前記運転者によって認識される位置との距離誤差を推定する距離誤差推定ステップと、
前記走行経路において、前記対象分岐に隣接する他の分岐が存在する場合、当該対象分岐と当該他の分岐との位置関係と、前記距離誤差推定ステップで推定された距離誤差とに基づき、前記表示手段における当該経路表示の表示位置を補正する表示制御ステップと、
を含む経路案内方法。
【請求項9】
請求項8に記載の方法をコンピュータに実行させる経路案内プログラム。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−141155(P2012−141155A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2010−292200(P2010−292200)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]