
自動分析装置

【課題】試薬容器の交換作業の効率の向上を図ることができる自動分析装置を提供する自動分析装置を提供する。
【解決手段】試薬庫10と、ラック置き場16と、試薬庫とラック置き場に隣接して設けられて試薬容器30(31)を一時的に配置する試薬容器交換部40と、試薬庫と試薬容器交換部との間で試薬容器を搬送する第1搬送部21と、試薬容器交換部とラック置き場との間で試薬容器を搬送する第2搬送部20とを備え、この試薬容器交換部40は、第2搬送部によりラック置き場から運ばれた新しい試薬容器を一時的に置く第1試薬容器置き場22と、第1搬送部により試薬庫から運ばれた交換を要する試薬容器を一時的に退避させて置く第2試薬容器置き場23と、を有し、試薬容器交換部40は、第1搬送部21が試薬容器30(31)を搬送する搬送方向Wに沿った位置に配置されている。
【解決手段】試薬庫10と、ラック置き場16と、試薬庫とラック置き場に隣接して設けられて試薬容器30(31)を一時的に配置する試薬容器交換部40と、試薬庫と試薬容器交換部との間で試薬容器を搬送する第1搬送部21と、試薬容器交換部とラック置き場との間で試薬容器を搬送する第2搬送部20とを備え、この試薬容器交換部40は、第2搬送部によりラック置き場から運ばれた新しい試薬容器を一時的に置く第1試薬容器置き場22と、第1搬送部により試薬庫から運ばれた交換を要する試薬容器を一時的に退避させて置く第2試薬容器置き場23と、を有し、試薬容器交換部40は、第1搬送部21が試薬容器30(31)を搬送する搬送方向Wに沿った位置に配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動分析装置に関し、特に例えば血液や尿等の試料(検体ともいう)を試薬と反応させて、その試料の光学的特性を測定することで試料を分析する自動分析装置に関する。
【背景技術】
【0002】
自動分析装置は、例えば恒温槽内部に配置された反応管に、試料と試薬庫に保持された試薬容器内の試薬とを分注させて、この反応管内の反応液に光を照射して、反応管内の反応液からの透過光を測定部で受光して、反応管内の試料の成分濃度を測定して測定結果を報告する装置である。
【0003】
この種の自動分析装置の例は、特許文献1に開示されている。特許文献1の自動分析装置は、試薬容器を把持する把持装置と、把持装置を移動し昇降させる把持搬送部と、複数の試薬容器を支持する容器支持台と、試薬格納庫と廃棄位置の間で容器支持台の移送を案内するガイドを有する移送部を有する。この把持搬送部と移送部が、試薬容器を試薬格納庫と廃棄位置の間で搬送して試薬容器の試薬格納庫からの取り出しと試薬容器の試薬格納庫への格納を行うようになっている。この従来例では、把持装置は、試薬容器を把持するために試薬容器の口部(分注口)をつかむ構造を有している。これにより、試薬容器は試薬容器のサイズが相違しても同じ把持動作で把持できるようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008―20361号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、試薬容器内の試薬が一定値以上無くなった空の試薬容器(交換を要する試薬容器)や、試薬容器内の試薬が有効期限切れになった試薬容器(以下、交換を要する試薬容器という)を、試薬の充填されている新しい試薬容器に交換をするのであるが、この試薬容器の交換は例えばオペレータが手動で行うことが多かった。
【0006】
そこで、特許文献1に記載の装置では、次のように試薬容器の交換を機械的な動作により行っている。試薬庫に交換を要する試薬容器があると、把持搬送部が試薬庫に移動してこの交換を要する試薬容器を取りに行って、さらに交換を要する試薬容器を試薬庫から廃棄位置(捨て置き場)へ移動して廃棄する。次に、この把持搬送部が移動して新しい試薬容器がセットされている場所に新しい試薬容器を取りに行って、新しい試薬容器を試薬庫に格納する必要がある。このように、交換を要する試薬容器を試薬庫から廃棄位置に移動する作業を行った後に、新しい試薬容器を試薬庫へ運ぶ作業を行う必要があるので、試薬容器の交換作業時間が長くなってしまい、分析作業効率の向上が図れない。
【0007】
本発明は、上記に鑑みてなされたものであり、その目的は、試薬容器の交換作業の効率の向上を図ることができる自動分析装置を提供することである。
【課題を解決するための手段】
【0008】
請求項1の発明は、自動分析装置において、検体と試薬容器から分注した試薬とを反応させて反応液の特性を測定することで前記検体を分析する自動分析装置であって、
複数の前記試薬容器を格納する試薬庫と、
複数の前記試薬容器を配置するラック置き場と、
前記試薬庫と前記ラック置き場に隣接して設けられて前記試薬容器を一時的に配置する試薬容器交換部と、
前記試薬庫と前記試薬容器交換部との間で前記試薬容器を搬送する第1搬送部と、
前記試薬容器交換部と前記ラック置き場との間で前記試薬容器を搬送する第2搬送部と、
を備え、
前記試薬容器交換部は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置き、前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く試薬容器置き場を有し、
前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する搬送方向に沿った位置に配置されていることを特徴とする。これにより、試薬容器の交換作業の効率の向上を図ることができる。
【0009】
請求項2の発明は、自動分析装置において、前記試薬容器交換部の前記試薬容器置き場は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置く第1試薬容器置き場と、
前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く第2試薬容器置き場を備えることを特徴とする。これにより。交換を要する試薬容器と新しい試薬容器を別々の置き場に一時的に置くことができ、交換を要する試薬容器と新しい試薬容器を交換する作業時間を短くして、新しい試薬容器を早く試薬庫に運び込むことができ、分析作業効率の向上が図れる。
【0010】
請求項3の発明は、自動分析装置において、前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する前記搬送方向と、前記第2搬送部が前記試薬容器を搬送する搬送方向とが交差する位置に配置されていることを特徴とする。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対して試薬容器を効率よく交換できる。
【0011】
請求項4の発明は、自動分析装置において、前記試薬容器交換部では、前記第1試薬容器置き場と前記第2試薬容器置き場は、並べて隣接して配置されていることを特徴とする。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対する搬送距離を短くして試薬容器を効率よく交換できる。
【0012】
請求項5の発明は、自動分析装置において、前記第1搬送部は、前記第1試薬容器置き場に置かれた新しい前記試薬容器を前記試薬庫内に運び、前記第2試薬容器置き場に置かれた交換を要する前記試薬容器を前記第1試薬容器置き場に置き、前記第2搬送部は、前記第1試薬容器置き場に置かれた交換を要する前記試薬容器を前記ラック置き場に戻すことを特徴とする。これにより、新しい試薬容器と交換を要する試薬容器を効率よく交換できる。
【0013】
請求項6の発明は、自動分析装置において、前記第1試薬容器置き場と前記ラック置き場との間と、前記第2試薬容器置き場と前記ラック置き場との間では、前記試薬容器は試薬容器キャリアに装着された状態で前記第2搬送部により搬送されることを特徴とする。これにより、第2搬送部は、試薬キャリアを用いて、試薬容器を容易に搬送できる。
【0014】
請求項7の発明は、自動分析装置において、前記ラック置き場に置かれた前記試薬容器が、前記交換を要する前記試薬容器であるか新しい前記試薬容器かを表示する状態表示部を備えることを特徴とする。これにより、オペレータは、作業中に試薬容器の状態を目視で認識できる。
【0015】
請求項8の発明は、自動分析装置において、前記ラック置き場は、前記自動分析装置の前面部側に配置され、前記状態表示部は、前記ラック置き場に沿って配置されていることを特徴とする。これにより、オペレータは、新しい試薬容器をラック置き場に容易に置いたり、交換を要する試薬容器をラック置き場から容易に取り除くことができ、医薬容器の交換作業性が向上する。
【0016】
請求項9の発明は、自動分析装置において、前記第2搬送部の前記搬送方向は前記前面部に沿っており、前記第1搬送部の前記搬送方向は、前記自動分析装置の隅部に沿っていることを特徴とする。これにより、第2搬送部の搬送動作は、前面部側で行えるので、自動分析装置の他の部分の動作の邪魔にならず、第1搬送部の搬送動作は、隅部で行えるので、同様にして自動分析装置の他の部分の動作の邪魔にならない。
【0017】
請求項10の発明は、自動分析装置において、前記試薬容器と前記試薬容器キャリアには、前記試薬容器内の試薬の識別情報を有する識別情報ラベルが配置されており、
前記ラック置き場には、前記識別情報ラベルから識別情報を取得する識別情報取得手段が配置されていることを特徴とする。これにより、試薬容器の試薬の識別を確実に行える。
【発明の効果】
【0018】
本発明によれば、試薬容器の交換作業の効率の向上を図ることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の自動分析装置の実施形態を示す斜視図である。
【図2】図1に示す自動分析装置を示す平面図である。
【図3】試薬容器交換部の第1試薬容器置き場と第2試薬容器置き場、ラック置き場の一部、試薬庫等を示す斜視図である。
【図4】第1試薬容器置き場と第2試薬容器置き場の平面図である。
【図5】試薬容器の形状例と試薬容器キャリアを示す斜視図である。
【図6】図1と図2に示す状態表示部の一部を示す図である。
【図7】第2搬送部の構造例を示す斜視図である。
【図8】第1搬送部の構造例を示す斜視図である。
【図9】試薬容器掴み機構部を示す斜視図である。
【図10】図9の試薬容器掴み機構部をH1方向から見た背面側の斜視図である。
【図11】図9の試薬容器掴み機構部をH2方向から見た底面図である。
【図12】図9の試薬容器掴み機構部を斜め下方向から見た底面側の斜視図である。
【図13】図9の試薬容器掴み機構部の主な構成要素を示す斜視図である。
【図14】試薬容器掴み機構部の動作を示す図である。
【図15】試薬容器掴み機構部の試薬容器押し出し部の動作を示す図である。
【図16】第1搬送部の動作と第2搬送部の動作を示す図である。
【図17】本発明の別の実施形態を示す図である。
【発明を実施するための形態】
【0020】
本発明の実施形態について図面を参照して説明する。
【0021】
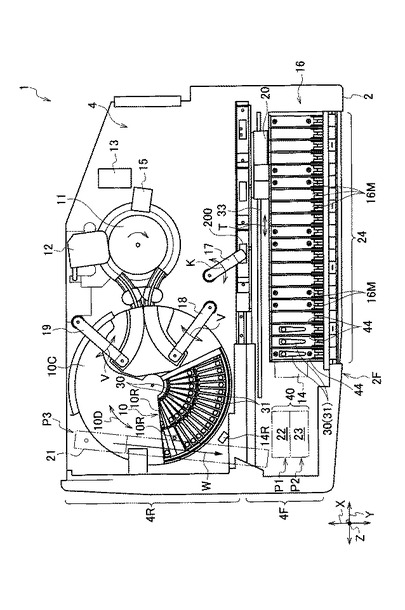
図1は、本発明の自動分析装置の実施形態を示す斜視図であり、図2は、図1に示す自動分析装置を示す平面図である。図1では、自動分析装置のカバーが開いており、図2では、このカバーの図示は省略している。
【0022】
図1と図2に示す自動分析装置1は、例えば恒温槽内部に配置された反応槽に、血液や尿(以下、試料または検体という)と試薬庫に保持された試薬容器内の試薬とを分注させて、この反応槽内の反応液に光を照射して、反応槽内の反応液からの透過光を測定部で受光して、反応槽内の試料の成分濃度を測定して測定結果を報告する装置である。この自動分析装置1は、試料に含まれる成分の濃度あるいは活性値等を、試料と検査試薬との化学反応を利用して光学的にもしくは電気的に測定する。
【0023】
自動分析装置1は、試薬容器内の試薬は測定時に使用され、試薬容器内から試薬を反応槽に分注して試薬容器内の残りの試薬の量が減少して、測定に使用できる回数が予め決められている所定の回数以下になった場合には、その試薬容器は交換を要する試薬容器として、試薬が充填されている新しい試薬容器と交換することができるようになっている。
【0024】
図1に示すように、自動分析装置1は、本体部2と、本体部2に手動開閉可能に取り付けられたカバー3と、コンピュータ5と、液晶表示装置等の表示装置6を備えている。本体部2の上面部は作業テーブル4である。カバー3は、分析作業中は、カバー3により作業テーブル4の全体を閉鎖できる。このカバー3が作業テーブル4を閉じた場合には、本体部2の各部の要素が動作できるが、カバー3を開けると各部の要素の動作が安全のために停止するようになっている。
【0025】
図1と図2に示すように、作業テーブル4の上には、1つの試薬庫10、反応槽11、スタラー(攪拌機)12、測定部13、バーコードリーダ(BCR)14、洗浄部15、ラック置き場16、サンプリングプローブ17、第1試薬プローブ18、第2試薬プローブ19、第2搬送部20、第1搬送部(試薬自動ローディング)21、状態表示部24、試薬容器交換部40を有する。
【0026】
オペレータは、本体部2の前面部2F側に立って作業テーブル4上での必要な作業を行うことができる。このため、図1に示すように、本体部2の前面部2Fには、状態表示部24が左右方向Yに沿って、ラック置き場16に対応して配置されている。状態表示部24はオペレータが目視し易い前面部2Fに配置されている。これにより、オペレータは、作業中に状態表示部24が表示する内容を目視で確認できる。
【0027】
図2に示すように、バーコードリーダ(BCR)14、ラック置き場16、第2搬送部20、試薬容器交換部40は、作業テーブル4の前半分領域4Fに配置されている。これに対して、試薬庫10、反応槽11、スタラー(攪拌機)12、測定部13、洗浄部15、サンプリングプローブ17、第1試薬プローブ18、第2試薬プローブ19は、作業テーブル4の後半分領域4Rに配置されている。
【0028】
図2に示すように、試薬庫10は、10D方向に回転してインデックス可能であり、しかも試薬庫10は上部を覆うための回転カバー10Cを有する。試薬庫10の回転カバー10Cは、自動開閉可能である。回転カバー10Cが回転することで、試薬庫10の必要な部分を開き、他の部分は閉じておくことができる。試薬庫10は、試薬容器(試薬ボトル)を収容する円形状の容器である。試薬庫10内には、複数の扇型の試薬ラック10Rを収容している。試薬ラック10Rには複数の試薬容器30が格納され、別の試薬ラック10Rには別の種類の複数の試薬容器31が格納されている。試薬容器30の容量は試薬容器31の容量に比べて大きい。試薬容器30,31は、試薬庫10の試薬ラック10Rにできるだけ多く設置できるように、好ましくは台形型のプラスチック容器である。
【0029】
図2に示す反応槽11は、試薬と試料(検体)を化学反応させる容器である。反応槽11の付近には、スタラー12、測定部13、洗浄部15が配置されている。スタラー12は、反応槽11内の試薬と試料を攪拌して混ぜる。洗浄部14は、反応槽11中の反応セルを洗浄する。測定部13は、反応槽11に対して光を照射して、反応槽11からの透過光を受光して、反応槽11内の試料の成分濃度を測定して測定結果を図1のコンピュータ5に報告する。
【0030】
図1と図2に示すバーコードリーダ14は、試薬容器30,31や試薬容器キャリアに予め設定されたバーコードを読み取る識別情報取得手段の一例であり、試薬容器30,31内の試薬の識別情報である例えば試薬の種類を読み取ってコンピュータ5に報告する。また、反応槽11の付近には、別のバーコードリーダ14Rが配置されており、このバーコードリーダ14Rは、試薬庫10内に格納されている試薬容器30(あるいは試薬容器31)に予め設定されているバーコードを読み取る識別情報取得手段の一例であり、試薬容器30,31内の試薬の識別情報である例えば試薬の種類を読み取ってコンピュータ5に報告する。
【0031】
図2に示すサンプリングプローブ17は、K方向に回転可能であり、検体ラック200から検体を吸引して反応槽11内に供給する。第1試薬プローブ19と第2試薬プローブ18は、それぞれV方向に回転可能であり、第1試薬プローブ19は、試薬庫10の内周側もしくは外周側の試薬容器30(あるいは試薬容器31)の口部から試薬を吸引して反応槽11内に供給する。第2試薬プローブ18は、試薬庫10の内周側もしくは外周側の試薬容器30(あるいは試薬容器31)の口部から試薬を吸引して反応槽11内に供給する。
【0032】
図1と図2に示すラック置き場16は、本体部2の前面部2F側において、左右方向Yに沿って水平方向に配置されている。このようにラック置き場16が前面部2Fに配置されているのは、オペレータがラック置き場16に対して、例えば新しい試薬容器の試薬容器キャリアを置いたり、交換を要する試薬容器の試薬容器キャリアを取り除いたりする作業を容易にできるからである。図2の左右方向Yは、前後方向Xと上下方向Zに対して直交している。
【0033】
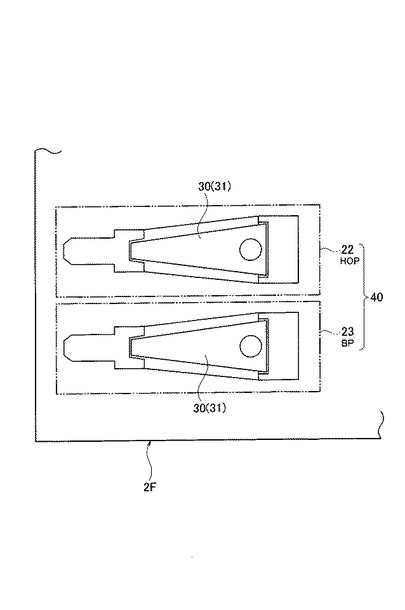
図3は、試薬容器交換部40の第1試薬容器置き場22と第2試薬容器置き場23、ラック置き場16の一部、試薬庫10等を示す斜視図である。図4は、第1試薬容器置き場22と第2試薬容器置き場23の平面図である。
【0034】
図1と図2に示すように、試薬容器交換部40は、第1試薬容器置き場22と第2試薬容器置き場23を有している。
【0035】
図1と図2に示す第2搬送部20は、ラック置き場16の配置位置に対応してガイドレール33に沿って、搬送方向T(第2搬送方向の一例)に移動して位置決め可能である。第2搬送部20は、ラック部16と、試薬容器交換部40との間で、試薬容器30(あるいは試薬容器31)を持って移動して交換することができる。搬送方向Tは、左右方向Yと平行である。
【0036】
図2と図3に示すように、第1搬送部21は、作業テーブル4の後半分領域4Rの左側位置P3に待機されているが、第1搬送部21の試薬容器掴み機構部60は、前半分領域4Fの試薬容器交換部40をカバーできる範囲にまで伸張可能である。第1搬送部21は、試薬庫10と試薬容器交換部40との間で、試薬容器を持って移動して交換することができる。
【0037】
図2に示すように、試薬容器交換部40の第1試薬容器置き場22と第2試薬容器置き場23は、前半分領域4Fの左側位置の位置P1、P2にそれぞれ配置されている。これらの位置P1、P2は、ラック置き場16の一端部側に配置されている。位置P1は、位置P2に比べて後半分領域4Rの試薬庫10に近く、位置P2は、位置P1に比べて本体部2の前面部2Fに近い。しかも、試薬容器交換部40は、試薬庫10とラック置き場16のそれぞれに近い位置に配置されている。試薬容器交換部40は、第1搬送部21の第1搬送方向Wと、第2搬送部20の第2搬送方向Tが交差する領域に配置されている。
【0038】
図2に示す試薬容器交換部40では、第1試薬容器置き場22と第2試薬容器置き場23は隣接して配置されており、第1試薬容器置き場22は試薬容器を第2搬送部20に受け渡すための受け渡し場所である。図3と図4に示す第1試薬容器置き場22は、ラック置き場16から運ばれてくる新しい試薬容器を一時的に置く場所である。
【0039】
第2試薬容器置き場23は、交換を要する試薬容器と新しい試薬容器の交換速度を速めるために設けられた試薬容器の一時退避場所である。つまり、第2試薬容器置き場23は、試薬庫10から運ばれてくる交換を要する試薬容器を一時的に置く場所である。
【0040】
この交換を要する試薬容器とは、例えば試薬容器内の試薬が一定値以上無くなった空の試薬容器である。新しい試薬容器とは、新たに準備され予め試薬が充填されている試薬容器である。このように、試薬容器交換部40には、第1試薬容器置き場22と第2試薬容器置き場23の合計2つの試薬容器の一時置き場を備えており、第1試薬容器置き場22と第2試薬容器置き場23はお互いに近い位置で隣り合せに配置することで、新しい試薬容器を試薬庫10へ運ぶまでの時間を短縮することができる。
【0041】
ここで、図5を参照して、試薬容器30,31の形状例と、試薬容器キャリア44を説明する。
【0042】
図5(A)には、試薬容器30,31が試薬容器キャリア44に着脱可能に搭載されている状態を示し、図5(B)は、2種類の内容量の異なるプラスチック製の試薬容器30,31の形状例を示している。試薬容器30,31はそれぞれ同じ大きさの口部45を有している台形型の容器あるいは扇型の容器であり、図2に示す第1試薬プローブ19と第2試薬プローブ18は、口部45を通じて内部の試薬を吸引することができるようになっている。
【0043】
図5(B)に示す大型の試薬容器30の容量は、例えば90mLであり、小型の試薬容器31の容量は、例えば55mLである。試薬容器30,31は、上から見てほぼ台形型の容器である。第1側面部30Fと第2側面部30Fと端面部30R、30Pを有している。口部45側の端面部30Rの幅G1が反対側の端面部30Pの幅G2に比べて大きく、第1側面部30Fと第2側面部30Fは端面部30P側に先細りになるように互いに傾斜している。同様にして、試薬容器31は第1側面部31Fと第2側面部31Fと端面部31R、31Pを有している。口部45側の端面部31Rの幅G3が反対側の端面部30Pの幅G4に比べて大きく、側面部31F、31Fは端面部31P側に先細りになるように互いに傾斜している。
【0044】
図5(A)に示すように、試薬容器30,31には識別用のバーコード46が貼り付けられており、試薬容器キャリア44にも同じ識別用のバーコード47が貼り付けられている。これらのバーコード46,47は、図2に示すバーコードリーダ14により読み取ることで、試薬容器30,31内の試薬の種類等の識別情報を得ることができる。
【0045】
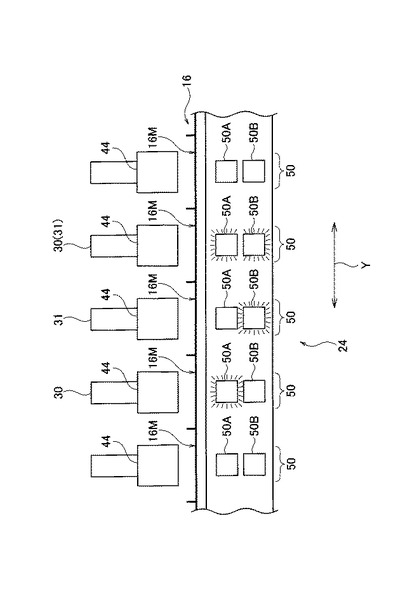
図1と図2に示すように、ラック置き場16は複数のラック溝部16Mを有している。図2と図6の例示するように、各ラック溝部16Mには、オペレータが手動で上記試薬容器キャリア44や検体ラックを着脱可能に並べて配置できる。また、交換を要する試薬容器を収めた試薬容器キャリア44をラック溝部16Mに戻して配置できる。これにより、オペレータは交換を要する試薬容器や新しい試薬容器等の交換が簡単に行える。
【0046】
図6は、図1と図2に示す状態表示部24の一部を示している。状態表示部24は、複数の点灯表示ユニット50を有している。状態表示部24は、ラック置き場16に対応して配置されており、各点灯表示ユニット50は、それぞれラック溝部16Mに対応して左右方向Yに沿って配置されている。
【0047】
各点灯表示ユニット50は、第1ランプ50Aと第2ランプ50Bを有している。図6における点灯表示ユニット50の点灯例では、第1ランプ50Aだけが点灯することで、ラック溝部16Mに置かれた試薬容器が新しい試薬容器30であることを示し、第2ランプ50Bだけが点灯することで、ラック溝部16Mに置かれた試薬容器が新しい試薬容器31であることを示し、第1ランプ50Aと第2ランプ50Bの両方が点灯することで、ラック溝部16Mに置かれた試薬容器が交換を要する試薬容器であることを示す。この点灯例はあくまで一例であり、特に限定されることはない。これにより、状態表示部24の点灯表示ユニット50が点灯することで、オペレータは作業中にどのような試薬容器が配置されているか、つまり試薬容器の状態を目視で確実に認識することができる。
【0048】
次に、図7を参照して、第2搬送部20の構造例を説明する。
【0049】
図7に示す第2搬送部20は、搬送方向Tのガイドレール33に沿って移動して位置決め可能である。第2搬送部20は、ラック置き場16と、試薬容器交換部40(第1試薬容器置き場22あるいは第2試薬容器置き場23)と、の間を移動し、試薬容器の取り外しと持ち運びが可能である。
【0050】
第2搬送部20は、ベース47、モータ48,49,50、アーム基部51、アーム52を有している。ベース47は、モータ48の作動によりガイドレール33に沿って移動して位置決め可能である。アーム基部51はモータ49を有しており、モータ49の作動により、アーム52はアーム基部51に対して上下軸53を中心としてC方向に回転可能である。アーム52の先端部には把持部55を有しており、把持部55は図5に示す試薬容器キャリア44の突出部58を把持する。これにより、第2搬送部20は、試薬容器キャリア44を持って試薬容器キャリア44をラック置き場16のラック溝部16Mと試薬容器交換部40(第1試薬容器置き場22あるいは第2試薬容器置き場23)との間で搬送することができる。
【0051】
図7のモータ基部51とアーム52は、ベース47のモータ50の駆動によりZ方向に移動可能である。これにより、把持部55は、ラック置き場16のラック溝部16Mに配置された試薬容器キャリア44の突出部58を把持してZ方向に持ち上げて、左右方向Yと前後方向Xに移動する。これにより、第2搬送部20の把持部55は、例えば第1試薬容器置き場22とラック置き場16のラック溝部16Mとの間で新しい試薬容器30(31)の試薬容器キャリア44を運ぶことができ、新しい試薬容器30(31)の試薬容器キャリア44はラック置き場16から第1試薬容器置き場22に一時的に置くことができる。
【0052】
また、第2搬送部20の把持部55は、例えば第1試薬容器置き場22に置かれた交換を要する試薬容器30(31)の試薬容器キャリア44をラック置き場16のラック溝部16Mに戻すことができる。各モータ48,49,50は、制御部100に電気的に接続されており、制御部100はコンピュータ5に電気的に接続されている。
【0053】
次に、図2と図3に示す第1搬送部21の構造例を、図8を参照して説明する。
【0054】
図2と図3に示す第1搬送部21は、第2搬送部の一例であり、作業テーブル4の後半分領域4Rの左側位置P3に収縮した状態で待機している。しかし、図8と図2に示すように、第1搬送部21は、前半分領域4Fの試薬容器交換部40に向けて搬送方向W(第1搬送方向の一例)に伸縮可能である。第1搬送部21の試薬容器掴み機構部60が、試薬庫10と、試薬容器交換部40の第1試薬容器置き場22あるいは第2試薬容器置き場23と、の間で、試薬容器30(31)だけを持って移動する。すなわち、第1搬送部21の試薬容器掴み機構部60は試薬容器だけを把持するが、試薬容器キャリア44は把持しないので、試薬容器キャリア44は第1試薬容器置き場22あるいは第2試薬容器置き場23に残しておく。
【0055】
図8に示すように、第1搬送部21を使用しない時には、W2方向に収縮して作業テーブル4の後半分領域4Rの左側位置P3おいて収縮状態で待機されている。しかし、第1搬送部21を使用する時には、作業テーブル4の後半分領域4Rの左側位置P3から、試薬庫10と試薬容器交換部40の第1試薬容器置き場22あるいは第2試薬容器置き場23まで、搬送方向Wに直線移動可能である。
【0056】
図8に示す第1搬送部21は、基部61、試薬容器掴み機構部60、スライド機構部62、上下移動機構部63、回転機構部64を有する。
【0057】
基部61は、アーム61Aとモータ61Mを有している。モータ61Mを作動することでスライド機構部62を伸縮させる。スライド機構部62は、アーム61Aに取り付けられており、モータ62Mと複数のベルト62Bとスライド部材62S、62Tを有する。モータ61Mを作動して2つのベルト62Bを駆動することで、スライド部材62S、62Tは、アーム61Aに対してW1方向に伸長しあるいはW2方向に収縮できる。
【0058】
図8の上下移動機構部63の軸部63Cは回転機構部64を保持している。上下移動機構部63はモータ62Mを作動することでZ方向に上下移動させる。回転機構部64は、試薬容器掴み機構部60を保持しており、モータ64Mを有する。回転機構部64は、モータ64Mを作動することで、回転中心軸CLを中心にしてR方向に回転可能である。
【0059】
このような第1搬送部21の構造を採用することで、第1搬送部21の試薬容器掴み機構部60を使用しない時には、W2方向に収縮して作業テーブル4の後半分領域4Rの左側位置P3おいて収縮状態で待機できる。しかし、第1搬送部21の試薬容器掴み機構部60を使用する時には、作業テーブル4の後半分領域4Rの左側位置P3から、試薬庫10と試薬容器交換部40のハンドオフポジション22あるいは第2試薬容器置き場23をカバーする領域まで、W1方向に沿って直線移動可能である。なお、各モータの動作は、制御部100により制御される。
【0060】
図8に示す試薬容器掴み機構部60の詳しい構造は図9〜図15に示している。次に、この試薬容器掴み機構部60の構造と動作例を説明する。
【0061】
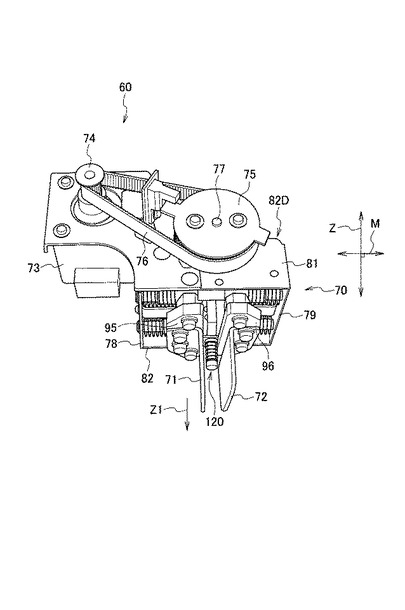
図9は、試薬容器掴み機構部60を示す斜視図である。図10は、図9の試薬容器掴み機構部60をH1方向から見た背面側の斜視図である。図11は、図9の試薬容器掴み機構部60をH2方向から見た底面図である。図12は、図9の試薬容器掴み機構部60を斜め下方向から見た底面側の斜視図である。図13は、図9の試薬容器掴み機構部60の主な構成要素を示す斜視図である。図14は、試薬容器掴み機構部60の動作を示す図である。図15は、試薬容器掴み機構部60の試薬容器押し出し部120の動作を示す図である。
【0062】
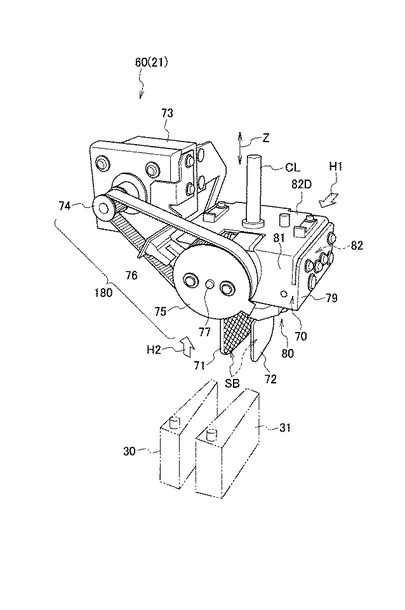
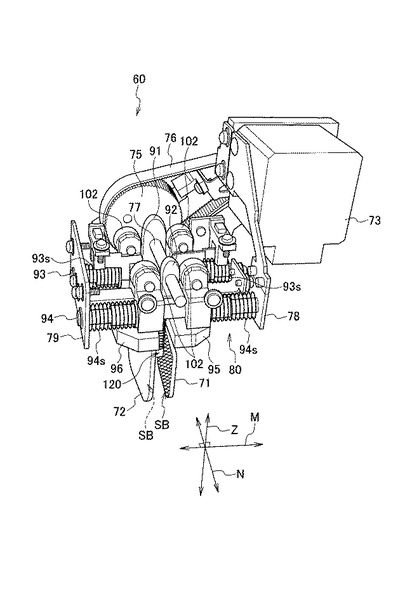
図9と図10に示すように、試薬容器掴み機構部60は、基部70、回転中心軸CL、2枚の第1挟み部材(パドルともいう)71と第2挟み部材(パドルともいう)72、モータ73、プーリ74,75、ベルト76、挟み部材操作部80、試薬容器押し出し部120(図10を参照)、駆動部180を有する。図10では、図9に示す基部70が取り除かれて挟み部材操作部80と試薬容器押し出し部120が露出している。
【0063】
図9の回転中心軸CLは基部70からZ方向に突出して設けられている。挟み部材操作部80は基部70の内部に配置されている。駆動部180は、モータ73、プーリ74,75、ベルト76を有する。モータ73の出力軸にはプーリ74が固定されている。小径のプーリ74と大径のプーリ75にはベルト76がかかっており、モータ73の出力軸の回転駆動力は、小径のプーリ74と大径のプーリ75とベルト76を介してシャフト77に伝達される。
【0064】
図10に示すように、モータ73は保持板78に固定されている。保持板78と反対の側の保持板79がZ方向に沿って平行に間隔をおいて配置されている。図11と図12に示すように、保持板78,79と保持板81,82,82Dは基部70を形成しており、挟み部材操作部80と試薬容器押し出し部120を覆うためのケーシングを形成している。
【0065】
図10〜図13を参照して、挟み部材操作部80の構造を説明する。
【0066】
挟み部材操作部80は、基部70の保持板78,79と保持板81,82,82Dで囲まれる収納空間内に収容されている機構部分であり、第1挟み部材71と第2挟み部材72をM方向に沿って移動することで互いに近づいたり遠ざかって、図5に示す試薬容器30と試薬容器31のいずれも着脱可能に挟んでつかむことができる。
【0067】
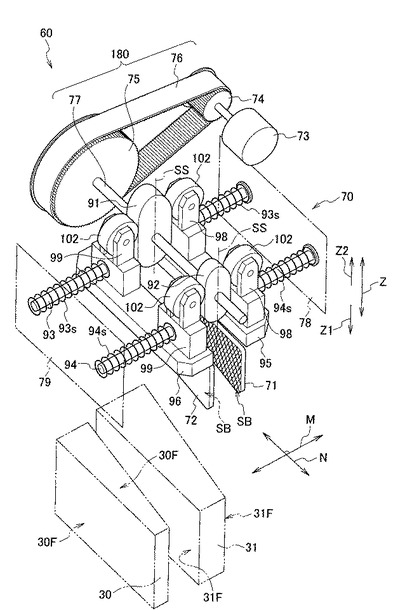
図10と図13に示すシャフト77は、基部70の保持板81,82に対してN方向に平行に配置されて回転可能である。シャフト77には、第1カム91と第2カム92が間隔をおいて固定されており、第1カム91の長軸と第2カム92の長軸は同じ向きである。図13に示すように、2つのガイド軸部93,94は、M方向に沿って平行に配置され、基部70の保持板78,79に対して固定されている。N方向とM方向とZ方向は、互いに直交している。ガイド軸部93には2つのスプリング93Sが同軸状に配置され、ガイド軸部94には2つのスプリング94Sが同軸状に配置されている。
【0068】
図11と図13に示すように、第1挟み部材71は第1スライダ95を有し、第2挟み部材72は第2スライダ96を有している。第1スライダ95と第2スライダ96の貫通穴には、ガイド軸部93,94がそれぞれ通されており、第1スライダ95と第2スライダ96はガイド軸部93,94に沿ってM方向にスライド可能である。
【0069】
第1スライダ95の下部には第1挟み部材71が固定され、第2スライダ96の下部には第2挟み部材72が固定されている。第1挟み部材71と第2挟み部材72は、第1スライダ95と第2スライダ96からZ1方向(下方向)に突出している。第1スライダ95と保持板78の間にはスプリング93S、94Sが介在されている。同様にして、第2スライダ96と保持板79の間にはスプリング93S、94Sが介在されている。
【0070】
図13に示すように、第1スライダ95は2つのカム受けブロック98を有し、第2スライダ96は2つのカム受けブロック99を有している。各カム受けブロック98、99にはローラ102が回転可能に支持されている。第1カム91側の2つのローラ102は第1カム91のカム倣い面に対して、スプリング93S、93Sの力により押し付けられて接触している。第2カム92側の2つのローラ102は第2カム92のカム倣い面に対して、スプリング94S、94Sの力により押し付けられて接触している。第1カム91と第2カム92は、共にほぼ楕円形のカム倣い面を有する。
【0071】
図13に示すように、第1カム91は第2カム92に比べて大きい。第1挟み部材71と第2挟み部材72は、図11に示すように、角度θだけ開いた状態で、第1スライダ95と第2スライダ96に対してそれぞれ固定されている。つまり、第1挟み部材71と第2挟み部材72の第1間隔E1は、第1挟み部材71と第2挟み部材72の第2間隔E2に比べて大きくなっている。このように第1挟み部材71と第2挟み部材72がN方向に平行ではなく角度θで開いた状態になっているのは、図5に示す試薬容器30(31)の形状に対応しているためであり、試薬容器30の両側の側面部30F、30Fと試薬容器31の両側の側面部31F、31Fに密着して確実に挟んでつかめるようにするためである。
【0072】
また、図9と図10に示すように、第1挟み部材71の内面と第2挟み部材72の内面には、試薬容器30,31が滑り落ちないようにして試薬容器30,31を確実に保持するために、好ましくは滑り止めの表面処理により滑り止め部材SBが施されているか、シート状の滑り止め部材SBが貼り付けられている。例えば滑り止め部材としては、耐薬品性の高いシリコンゴムを採用できるが、特に限定されない。これにより、第1挟み部材71と第2挟み部材72は試薬容器を確実につかんでおくことができ、停電時でも試薬容器を保持する力を失うことが無く試薬容器の落下を防げる。
【0073】
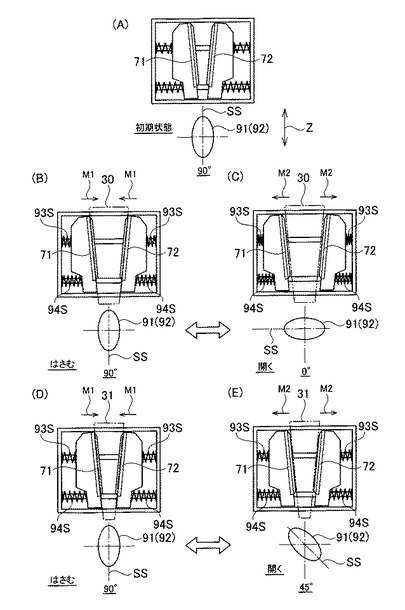
次に、図13と図14を参照して、上述した試薬容器掴み機構部60が、図5に示す試薬容器30,31をつかむ動作を説明する。図14は、第1挟み部材71と第2挟み部材72により試薬容器30,31を挟んでつかむ様子を示している。
【0074】
図13に示すように、第1カム91と第2カム92の長軸部分SSが、Z方向に向いている状態が初期状態である。この初期状態における第1挟み部材71と第2挟み部材72の相対的な位置を図14(A)に示す。
【0075】
図14(B)と図14(C)は、大型の試薬容器30を挟んだり離したりする様子を示している。図14(B)では、第1挟み部材71と第2挟み部材72が大型の試薬容器30を挟んでつかんでいる状態を示し、図14(C)では、第1挟み部材71と第2挟み部材72が大型の試薬容器30を挟む前の離した状態を示している。図14(B)から図14(C)に示すように、第1カム91と第2カム92の長軸部分SSが垂直から水平に90度回転すると、第1挟み部材71と第2挟み部材72は、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72の間に試薬容器30を確実に挿入できる。
【0076】
そして、図14(C)から図14(B)に示すように、第1カム91と第2カム92の長軸部分SSが水平から垂直に90度逆回転すると、第1挟み部材71と第2挟み部材72はスプリング93S、94Sの力によりM1方向に互いに近づくので、第1挟み部材71と第2挟み部材72は試薬容器30をつかむことができる。また、第1挟み部材71と第2挟み部材72から試薬容器30を離す場合には、図14(B)から図14(C)に示すように、第1カム91と第2カム92の長軸部分SSが垂直から水平に90度回転され、第1挟み部材71と第2挟み部材72が、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72から試薬容器30を確実に離すことできる。
【0077】
同様に、図14(D)と図14(E)は、小型の試薬容器31を挟んだり離したりする様子を示している。図14(D)では、第1挟み部材71と第2挟み部材72が小型の試薬容器31を挟んでつかんでいる状態を示し、図14(E)では、第1挟み部材71と第2挟み部材72から小型の試薬容器31を挟む前の離した状態を示している。 図14(D)から図14(E)に示すように、第1カム91と第2カム92の長軸部分SSが垂直から斜め45度回転すると、第1挟み部材71と第2挟み部材72は、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72の間に試薬容器31を確実に挿入できる。
【0078】
そして、図14(E)から図14(D)に示すように、第1カム91と第2カム92の長軸部分SSが斜め方向から垂直に45度逆回転すると、第1挟み部材71と第2挟み部材72はスプリング93S、94Sの力によりM1方向に互いに近づくので、第1挟み部材71と第2挟み部材72は試薬容器31を確実につかむことができる。
【0079】
また、図14(D)から図14(E)に示すように、第1挟み部材71と第2挟み部材72から試薬容器31を離す場合には、第1カム91と第2カム92の長軸部分SSが垂直から斜め45度回転され、第1挟み部材71と第2挟み部材72が、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72から試薬容器31を確実に離すことできる。
【0080】
これにより、試薬容器掴み機構部60は、試薬容器30(31)を安全に確実に挟んでつかむことで交換することができ、自動分析装置1を扱うオペレータの負担を減らすことができる。
【0081】
ここで、図2の試薬庫10から交換を要する試薬容器を取り出す場合の動作例にあげる。
【0082】
この場合には、図9の第1挟み部材71と第2挟み部材72が試薬容器30(試薬容器31)の上方に待機される。図13の駆動部180のモータ73が作動して、第1挟み部材71と第2挟み部材72の間隔が4つのスプリング93S、94Sの力に抗して押し広げられる。そして、第1挟み部材71と第2挟み部材72の間隔が試薬容器30(試薬容器31)を挟んでつかむのに十分な値になると、図13に示す試薬容器掴み機構部60がZ1方向に下がり、第1挟み部材71と第2挟み部材72が試薬容器30(31)の2つの側面部30F、30F(31F、31F)に対面する。
【0083】
図13のモータ73を逆回転させると、第1挟み部材71と第2挟み部材72の間隔がスプリング93S、94Sの力により狭まって試薬容器30の両側の側面部30F、30F(試薬容器31の両側の側面部31F、31F)を挟んでつかむことができる。そして、図13の試薬容器掴み機構部60がZ2方向に上がれば、図2の試薬庫10から試薬容器30(試薬容器31)を取り出すことができる。また、図13の試薬容器掴み機構部60は、同様の要領により、新しい試薬容器30(試薬容器31)を試薬庫10内に格納できる。
【0084】
このように、試薬容器掴み機構部60の第1挟み部材71と第2挟み部材72は、大型の試薬容器30であっても小型の試薬容器31であっても、確実にはさんでつかみ、そして離すことで、試薬容器のスムーズな搬送と交換ができる。
【0085】
試薬容器掴み機構部60は、複数の異なるカム幅を有する2つのカムを配置して、これらのカム幅に合わせて第1挟み部材71と第2挟み部材72の間隔を変えることで、互いに異なる大きさの複数の試薬容器を保持することができる。第1挟み部材71と第2挟み部材72は、試薬容器の口部を挟むのではなく、試薬容器の側面部に当てて挟んでつかむ。従って、試薬容器の口部に試薬が着いていたとしても、試薬が第1挟み部材71と第2挟み部材72には付着せず、試薬が第1挟み部材71と第2挟み部材72を介して他の試薬容器に付着して反応することを防ぐことができる。これにより、試薬容器の交換が安全にでき、精度良い分析作業を行うことができ、試薬容器を確実に保持できる。
【0086】
第1カム91と第2カム92が初期位置から任意の角度だけ回転することで、第1挟み部材71と第2挟み部材72は任意の間隔だけ広げることができる。第1挟み部材71と第2挟み部材72は、複数のスプリング93S、94Sの力を用いて試薬容器30(試薬容器31)を機械的に挟んでつかむ構造であるので、仮に停電した場合であっても、試薬容器30(試薬容器31)を挟んでつかむ状態をそのままスプリングの機械的な力により維持することができる。これにより、停電した場合であっても、試薬容器が第1挟み部材71と第2挟み部材72の間から落下する現象を確実に防ぐことができる。
【0087】
第1挟み部材71と第2挟み部材72は、好ましくは薄板状の部材である。従って、試薬庫10内では複数の試薬容器30(試薬容器31)が非常に小さい隙間を空けて密集して配列されている。しかも、第1挟み部材71と第2挟み部材72は第1カムカム91と第2カム92の回転により初期位置から少し開くようになっている。従って、これらの隙間を利用して、これ等の隙間には第1挟み部材71と第2挟み部材72を入れることで、任意の位置の試薬容器30(試薬容器31)を挟んでつかむことができる。つまり、試薬容器が密集した試薬庫10内でも、異なる内容量を有する試薬容器30と試薬容器31をそれぞれ確実に交換することができる。
【0088】
図15は、試薬容器掴み機構部60の試薬容器押し出し部120を示している。図15(A)では、試薬容器30(試薬容器31)が第1挟み部材71と第2挟み部材72によりつかまれている状態を示し、図15(B)では、試薬容器30(試薬容器31)から第1挟み部材71と第2挟み部材72が離れて、試薬容器30(試薬容器31)がスプリング123の力によりZ1方向に強制的に押し出される様子を示している。
【0089】
図15に示す試薬容器押し出し部120は、図11と図12にも示しており、第1挟み部材71と第2挟み部材72の間に配置されている。試薬容器押し出し部120は、支持部材121、押出しピン122、スプリング123を有している。支持部材121は、基部70に対して、水平に固定されている。押出しピン122は支持部材121に対して直交するZ方向に移動可能に保持されている。押出しピン122は支持部材121の穴125を通っており抜け止め部材126を有する。スプリング123は、押出しピン122に対して同軸状に、支持部材121の下面と押出しピン122の先端部124の間に配置されている。
【0090】
図15(A)に示すように、第1挟み部材71と第2挟み部材72が試薬容器30(試薬容器31)をつかんでいる場合には、押出しピン122の先端部124が試薬容器30(試薬容器31)の上面30T(31T)にスプリング123の力に抗して押し当てられ、押出しピン122はZ2方向に上昇している。そして、第1挟み部材71と第2挟み部材72の間隔が開いて試薬容器30(試薬容器31)を離すと、試薬容器30(試薬容器31)は、スプリング123の力によりZ1方向に強制的に押し出される。
【0091】
これにより、試薬容器30(試薬容器31)の上面30T(31T)が、押出しピン122によりZ1方向に押し下げられる構造を採用しているので、試薬容器30(試薬容器31)は、第1挟み部材71と第2挟み部材72から確実に離すことができ、試薬容器30(試薬容器31)が第1挟み部材71と第2挟み部材72に対して貼りついてしまって取り出せない現象を確実に防ぐことができる。
【0092】
次に、図2を主に参照して、上述した自動分析装置1の自動分析動作例を説明する。
【0093】
図2において、ラック置き場16には試料容器(検体容器ともいう)200が置かれる。第2搬送部20が試料容器200をピックアップしてバーコードリーダ14によりバーコードを読む。そして、第2搬送部20が試料容器200を作業テーブル4の前面に置く。サンプリングプローブ17が試料容器200内から試料(検体)を吸引して反応槽11内に運ぶ。
【0094】
図2の第1試薬プローブ19が、試薬庫10内の試薬容器30(あるいは試薬容器31)から第1試薬を吸引して反応槽11内に供給する。スタラー12が反応槽11内の試料と第1試薬を混ぜる。次に、第2試薬プローブ18が、試薬庫10内の試薬容器30(あるいは試薬容器31)から第2試薬を吸引して反応槽11内に供給する。スタラー12が反応槽11内の試料と第1試薬と第2試薬を混ぜる。
【0095】
そして、図2の測定部13が、反応槽11に光を照射して、反応槽11からの透過光を受光して、反応槽11内の試料の成分濃度を測定して測定結果を図1のコンピュータ5に報告する。その後、洗浄部14は反応槽11中の反応セルを洗浄する。このようにして、自動分析装置1は試料の自動分析を行うことができる。
【0096】
次に、自動分析装置1では、試薬容器内の試薬は測定時に使用され、試薬容器内の試薬の量が減少して、測定に使用できる回数が予め決められている所定の回数以下になった場合には、その試薬容器は交換を要する試薬容器として、試薬が充填されている新しい試薬容器と交換する必要がある。
【0097】
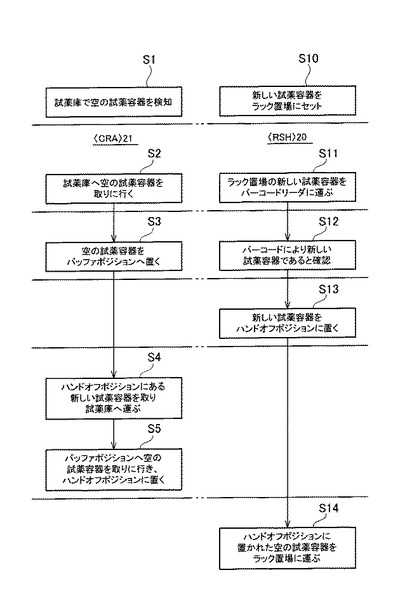
そこで、このような交換を要する試薬容器(古い試薬容器)と新しい試薬容器との交換手順を、図2、図3、図16等を主に参照して説明する。図16は、図2の第1搬送部21の動作をステップS2〜S5に示し、図2の第2搬送部20の動作をステップS11〜S14に示している。
【0098】
図2と図3に示すように、第1搬送部21は、作業テーブル4の後半分領域4Rの左側位置P3に待機されている。
【0099】
図16のステップS1では、図1に示すコンピュータ5が、図2の試薬庫10で試薬容器30(あるいは試薬容器31)における試薬残量が予め設定された値を下回ったことを検知(交換を要する試薬容器、空の容器であると検知)したら、「交換を要する試薬容器に代えて試薬庫10に新しい試薬容器を設定してください」との警告メッセージを例えば図1の表示装置6に表示する。試薬容器30(あるいは試薬容器31)における試薬残量は、この試薬容器から試薬が吸引された回数で求めることができる。
【0100】
一方、図16のステップS10では、オペレータが、図5に示す新しい試薬容器30(あるいは試薬容器31)を入れた試薬容器キャリア44を、図2のラック置き場16にセットする。
【0101】
図16のステップS2では、試薬庫10の回転カバー10Cを自動で開ける。図2に示す第1搬送部21が試薬庫10へ交換を要する試薬容器30(あるいは試薬容器31)を取りに行き、図9に示す第1搬送部21の試薬容器掴み機構部60は、交換を要する試薬容器30(あるいは試薬容器31)を挟んでつかむ。
【0102】
ステップS3では、図8に示す第1搬送部21の試薬容器掴み機構部60は、スライド機構部62によりW1方向に直線移動され、上下移動機構部63により上下動作され、そして回転機構部64により回転されることで、交換を要する試薬容器30(あるいは試薬容器31)を図2の試薬容器交換部40の第2試薬容器置き場23に置く。このようにして、交換を要する試薬容器30(あるいは試薬容器31)は、試薬庫10から第2試薬容器置き場23に運ぶことができる。
【0103】
一方、図16のステップS11では、第2搬送部20が図2のラック置き場16の新しい試薬容器が入った試薬容器キャリア44をバーコードリーダ14に運んで、図5のバーコード46,47の一方もしくは両方を読み取る。ステップS12では、バーコードリーダ14がバーコードを読み取ることで、新しい試薬容器であることを確認する。
【0104】
試薬容器の交換のタイミングが近づいたら。ステップS13では、第2搬送部20は新しい試薬容器30(あるいは試薬容器3)を、図2の第1試薬容器置き場22に置く。
【0105】
図16のステップS4では、図8に示す第1搬送部21の試薬容器掴み機構部60は、第1試薬容器置き場22に置かれている新しい試薬容器30(あるいは試薬容器31)だけをつかんで試薬容器キャリア44から取って、試薬庫10内に運ぶ。
【0106】
ステップS5では、第1搬送部21の試薬容器掴み機構部60は、第2試薬容器置き場23にある交換を要する試薬容器30(あるいは試薬容器31)を取りに行って、第1試薬容器置き場22の試薬容器キャリア44内に置く。そして、図16のステップS14では、第2搬送部20は、第1試薬容器置き場22に置かれた交換を要する試薬容器30(あるいは試薬容器31)を試薬容器キャリア44と一緒にラック置き場16のラック溝部16Mに運ぶ。
【0107】
本発明の自動分析装置の実施形態では、交換を要する試薬容器と新しい試薬容器を交換する作業時間を短くして、新しい試薬容器を早く試薬庫に運び込むことができ、分析作業効率の向上が図れ、試薬容器の交換作業の効率の向上が図れる。
【0108】
以上説明した本発明の自動分析装置1は、検体と試薬容器から分注した試薬とを反応させて反応液の特性を測定することで前記検体を分析する自動分析装置であって、
複数の試薬容器を格納する試薬庫と、複数の試薬容器を配置するラック置き場と、試薬庫とラック置き場に隣接して設けられて試薬容器を一時的に配置する試薬容器交換部と、試薬庫と試薬容器交換部との間で試薬容器を搬送する第1搬送部21と、試薬容器交換部とラック置き場との間で試薬容器を搬送する第2搬送部20と、を備え、試薬容器交換部は、第2搬送部によりラック置き場から運ばれた新しい試薬容器を一時的に置き、第1搬送部により試薬庫から運ばれた交換を要する試薬容器を一時的に退避させて置く試薬容器置き場を有し、試薬容器交換部は、第1搬送部が試薬容器を搬送する搬送方向に沿った位置に配置されていることを特徴とする。これにより、試薬容器の交換作業の効率の向上を図ることができる。
【0109】
自動分析装置1では、試薬容器交換部の試薬容器置き場は、第2搬送部によりラック置き場から運ばれた新しい試薬容器を一時的に置く第1試薬容器置き場22と、第1搬送部により試薬庫から運ばれた交換を要する試薬容器を一時的に退避させて置く第2試薬容器置き場23であることを特徴とする。これにより。交換を要する試薬容器と新しい試薬容器を別々の置き場に一時的に置くことができ、交換を要する試薬容器と新しい試薬容器を交換する作業時間を短くして、新しい試薬容器を早く試薬庫に運び込むことができ、分析作業効率の向上が図れる。
【0110】
また、自動分析装置1では、試薬容器交換部は、第1搬送部が試薬容器を搬送する搬送方向と、第2搬送部が試薬容器を搬送する搬送方向とが交差する位置に配置されている。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対して試薬容器を効率よく交換できる。
【0111】
試薬容器交換部では、第1試薬容器置き場と第2試薬容器置き場は、並べて隣接して配置されていることを特徴とする。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対する搬送距離を短くして試薬容器を効率よく交換できる。
【0112】
第1搬送部は、第1試薬容器置き場に置かれた新しい試薬容器を試薬庫内に運び、第2試薬容器置き場に置かれた交換を要する試薬容器を第1試薬容器置き場に置き、第2搬送部は、第1試薬容器置き場に置かれた交換を要する試薬容器をラック置き場に戻すことを特徴とする。これにより、これにより、新しい試薬容器と交換を要する試薬容器を効率よく交換できる。
【0113】
第1試薬容器置き場とラック置き場との間と、第2試薬容器置き場とラック置き場との間では、試薬容器は試薬容器キャリアに装着された状態で第2搬送部により搬送されることを特徴とする。これにより、第2搬送部は、試薬キャリアを用いて、試薬容器を容易に搬送できる。
【0114】
ラック置き場に置かれた試薬容器が、交換を要する試薬容器であるか新しい試薬容器かを表示する状態表示部を備えることを特徴とする。これにより、オペレータは、作業中に試薬容器の状態を目視で認識できる。
【0115】
ラック置き場は、自動分析装置の前面部側に配置され、状態表示部は、ラック置き場に沿って配置されていることを特徴とする。これにより、オペレータは、新しい試薬容器をラック置き場に容易に置いたり、交換を要する試薬容器をラック置き場から容易に取り除くことができ、医薬容器の交換作業性が向上する。
【0116】
第2搬送部の搬送方向は前面部に沿っており、第1搬送部の搬送方向は、自動分析装置の隅部に沿っていることを特徴とする。これにより、第2搬送部の搬送動作は、前面部側で行えるので、自動分析装置の他の部分の動作の邪魔にならず、第1搬送部の搬送動作は、隅部で行えるので、同様にして自動分析装置の他の部分の動作の邪魔にならない。
【0117】
試薬容器と試薬容器キャリアには、試薬容器内の試薬の識別情報を有する識別情報ラベルが配置されており、ラック置き場には、識別情報ラベルから識別情報を取得する識別情報取得手段が配置されていることを特徴とする。これにより、試薬容器の試薬の識別を確実に行える。
【0118】
本発明は上記実施形態に限定されない。
【0119】
例えば、1つの試薬庫10が配置されているが、2つ以上の試薬庫を配置しても良い。
【0120】
図17は、本発明の別の実施形態を示している。図17に示す試薬容器掴み機構部60Aは、2本のリニアガイド130,131を有している。リニアガイド130は2つの滑りブロック132を備え、リニアガイド131は2つの滑りブロック133を有している。2つの滑りブロック132はリニアガイド130に沿ってM方向にスライド自在であり、2つの滑りブロック133はリニアガイド131に沿ってM方向にスライド自在である。滑りブロック132,133には、第1挟み部材71と第2挟み部材72が取り付けられている。リニアガイド130の滑りブロック132,132間には、引張バネが取り付けられ、リニアガイド131の滑りブロック133,133間には、別の引張バネが取り付けられている。滑りブロック132,132間には、大きいカムが配置され、滑りブロック133,133には小さいカムが配置されている。また、リニアガイドの他にスプラインレールを用いることができる。
【0121】
また、1つの試薬庫が設けられているが、複数の試薬庫を設けるようにしても良い。ラック置き場には、置かれた新しい試薬容器の識別情報を取得する識別情報取得手段としてのバーコードリーダが配置され、試薬容器や試薬容器キャリアにはバーコードが配置されている。しかし、これに限らず試薬容器や試薬容器キャリアにはICチップなどの他の種類の識別情報ラベルを配置して、識別情報取得手段が識別情報ラベルからの識別情報を取得するようにしても良い。
【0122】
さらに、本発明の実施の形態に開示されている複数の構成要素を適宜組み合わせることにより種々の発明を形成できる。例えば、本発明の実施の形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施の形態に亘る構成要素を適宜組み合わせてもよい。
【符号の説明】
【0123】
1 自動分析装置
2 本体部
3 カバー
4 作業テーブル
10 試薬庫
10R 試薬ラック
11 反応槽
13 測定部
14 バーコードリーダ(識別情報取得手段の一例)
16 ラック置き場
17 サンプリングプローブ
18 第2試薬プローブ
19 第1試薬プローブ
20 第2搬送部
21 第1搬送部
22 第1試薬容器置き場
23 第2試薬容器置き場
24 状態表示部
30,31 試薬容器
30F、31F 試薬容器の側面部
40 試薬容器交換部
44 試薬容器キャリア
45 口部
55 第2搬送部の把持部
60 第1搬送部の試薬容器掴み機構部
61 基部
62 スライド機構部
63 上下移動機構部
64 回転機構部
70 基部
71 第1挟み部材
72 第2挟み部材
73 モータ
74,75 プーリ
76 ベルト76
80 挟み部材操作部
91 第1カム
92 第2カム
120 試薬容器押し出し部
180 駆動部
SB 滑り止め部材
W 移動方向(第1搬送方向の一例)
T 移動方向(第2搬送方向の一例)
【技術分野】
【0001】
本発明は、自動分析装置に関し、特に例えば血液や尿等の試料(検体ともいう)を試薬と反応させて、その試料の光学的特性を測定することで試料を分析する自動分析装置に関する。
【背景技術】
【0002】
自動分析装置は、例えば恒温槽内部に配置された反応管に、試料と試薬庫に保持された試薬容器内の試薬とを分注させて、この反応管内の反応液に光を照射して、反応管内の反応液からの透過光を測定部で受光して、反応管内の試料の成分濃度を測定して測定結果を報告する装置である。
【0003】
この種の自動分析装置の例は、特許文献1に開示されている。特許文献1の自動分析装置は、試薬容器を把持する把持装置と、把持装置を移動し昇降させる把持搬送部と、複数の試薬容器を支持する容器支持台と、試薬格納庫と廃棄位置の間で容器支持台の移送を案内するガイドを有する移送部を有する。この把持搬送部と移送部が、試薬容器を試薬格納庫と廃棄位置の間で搬送して試薬容器の試薬格納庫からの取り出しと試薬容器の試薬格納庫への格納を行うようになっている。この従来例では、把持装置は、試薬容器を把持するために試薬容器の口部(分注口)をつかむ構造を有している。これにより、試薬容器は試薬容器のサイズが相違しても同じ把持動作で把持できるようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008―20361号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、試薬容器内の試薬が一定値以上無くなった空の試薬容器(交換を要する試薬容器)や、試薬容器内の試薬が有効期限切れになった試薬容器(以下、交換を要する試薬容器という)を、試薬の充填されている新しい試薬容器に交換をするのであるが、この試薬容器の交換は例えばオペレータが手動で行うことが多かった。
【0006】
そこで、特許文献1に記載の装置では、次のように試薬容器の交換を機械的な動作により行っている。試薬庫に交換を要する試薬容器があると、把持搬送部が試薬庫に移動してこの交換を要する試薬容器を取りに行って、さらに交換を要する試薬容器を試薬庫から廃棄位置(捨て置き場)へ移動して廃棄する。次に、この把持搬送部が移動して新しい試薬容器がセットされている場所に新しい試薬容器を取りに行って、新しい試薬容器を試薬庫に格納する必要がある。このように、交換を要する試薬容器を試薬庫から廃棄位置に移動する作業を行った後に、新しい試薬容器を試薬庫へ運ぶ作業を行う必要があるので、試薬容器の交換作業時間が長くなってしまい、分析作業効率の向上が図れない。
【0007】
本発明は、上記に鑑みてなされたものであり、その目的は、試薬容器の交換作業の効率の向上を図ることができる自動分析装置を提供することである。
【課題を解決するための手段】
【0008】
請求項1の発明は、自動分析装置において、検体と試薬容器から分注した試薬とを反応させて反応液の特性を測定することで前記検体を分析する自動分析装置であって、
複数の前記試薬容器を格納する試薬庫と、
複数の前記試薬容器を配置するラック置き場と、
前記試薬庫と前記ラック置き場に隣接して設けられて前記試薬容器を一時的に配置する試薬容器交換部と、
前記試薬庫と前記試薬容器交換部との間で前記試薬容器を搬送する第1搬送部と、
前記試薬容器交換部と前記ラック置き場との間で前記試薬容器を搬送する第2搬送部と、
を備え、
前記試薬容器交換部は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置き、前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く試薬容器置き場を有し、
前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する搬送方向に沿った位置に配置されていることを特徴とする。これにより、試薬容器の交換作業の効率の向上を図ることができる。
【0009】
請求項2の発明は、自動分析装置において、前記試薬容器交換部の前記試薬容器置き場は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置く第1試薬容器置き場と、
前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く第2試薬容器置き場を備えることを特徴とする。これにより。交換を要する試薬容器と新しい試薬容器を別々の置き場に一時的に置くことができ、交換を要する試薬容器と新しい試薬容器を交換する作業時間を短くして、新しい試薬容器を早く試薬庫に運び込むことができ、分析作業効率の向上が図れる。
【0010】
請求項3の発明は、自動分析装置において、前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する前記搬送方向と、前記第2搬送部が前記試薬容器を搬送する搬送方向とが交差する位置に配置されていることを特徴とする。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対して試薬容器を効率よく交換できる。
【0011】
請求項4の発明は、自動分析装置において、前記試薬容器交換部では、前記第1試薬容器置き場と前記第2試薬容器置き場は、並べて隣接して配置されていることを特徴とする。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対する搬送距離を短くして試薬容器を効率よく交換できる。
【0012】
請求項5の発明は、自動分析装置において、前記第1搬送部は、前記第1試薬容器置き場に置かれた新しい前記試薬容器を前記試薬庫内に運び、前記第2試薬容器置き場に置かれた交換を要する前記試薬容器を前記第1試薬容器置き場に置き、前記第2搬送部は、前記第1試薬容器置き場に置かれた交換を要する前記試薬容器を前記ラック置き場に戻すことを特徴とする。これにより、新しい試薬容器と交換を要する試薬容器を効率よく交換できる。
【0013】
請求項6の発明は、自動分析装置において、前記第1試薬容器置き場と前記ラック置き場との間と、前記第2試薬容器置き場と前記ラック置き場との間では、前記試薬容器は試薬容器キャリアに装着された状態で前記第2搬送部により搬送されることを特徴とする。これにより、第2搬送部は、試薬キャリアを用いて、試薬容器を容易に搬送できる。
【0014】
請求項7の発明は、自動分析装置において、前記ラック置き場に置かれた前記試薬容器が、前記交換を要する前記試薬容器であるか新しい前記試薬容器かを表示する状態表示部を備えることを特徴とする。これにより、オペレータは、作業中に試薬容器の状態を目視で認識できる。
【0015】
請求項8の発明は、自動分析装置において、前記ラック置き場は、前記自動分析装置の前面部側に配置され、前記状態表示部は、前記ラック置き場に沿って配置されていることを特徴とする。これにより、オペレータは、新しい試薬容器をラック置き場に容易に置いたり、交換を要する試薬容器をラック置き場から容易に取り除くことができ、医薬容器の交換作業性が向上する。
【0016】
請求項9の発明は、自動分析装置において、前記第2搬送部の前記搬送方向は前記前面部に沿っており、前記第1搬送部の前記搬送方向は、前記自動分析装置の隅部に沿っていることを特徴とする。これにより、第2搬送部の搬送動作は、前面部側で行えるので、自動分析装置の他の部分の動作の邪魔にならず、第1搬送部の搬送動作は、隅部で行えるので、同様にして自動分析装置の他の部分の動作の邪魔にならない。
【0017】
請求項10の発明は、自動分析装置において、前記試薬容器と前記試薬容器キャリアには、前記試薬容器内の試薬の識別情報を有する識別情報ラベルが配置されており、
前記ラック置き場には、前記識別情報ラベルから識別情報を取得する識別情報取得手段が配置されていることを特徴とする。これにより、試薬容器の試薬の識別を確実に行える。
【発明の効果】
【0018】
本発明によれば、試薬容器の交換作業の効率の向上を図ることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の自動分析装置の実施形態を示す斜視図である。
【図2】図1に示す自動分析装置を示す平面図である。
【図3】試薬容器交換部の第1試薬容器置き場と第2試薬容器置き場、ラック置き場の一部、試薬庫等を示す斜視図である。
【図4】第1試薬容器置き場と第2試薬容器置き場の平面図である。
【図5】試薬容器の形状例と試薬容器キャリアを示す斜視図である。
【図6】図1と図2に示す状態表示部の一部を示す図である。
【図7】第2搬送部の構造例を示す斜視図である。
【図8】第1搬送部の構造例を示す斜視図である。
【図9】試薬容器掴み機構部を示す斜視図である。
【図10】図9の試薬容器掴み機構部をH1方向から見た背面側の斜視図である。
【図11】図9の試薬容器掴み機構部をH2方向から見た底面図である。
【図12】図9の試薬容器掴み機構部を斜め下方向から見た底面側の斜視図である。
【図13】図9の試薬容器掴み機構部の主な構成要素を示す斜視図である。
【図14】試薬容器掴み機構部の動作を示す図である。
【図15】試薬容器掴み機構部の試薬容器押し出し部の動作を示す図である。
【図16】第1搬送部の動作と第2搬送部の動作を示す図である。
【図17】本発明の別の実施形態を示す図である。
【発明を実施するための形態】
【0020】
本発明の実施形態について図面を参照して説明する。
【0021】
図1は、本発明の自動分析装置の実施形態を示す斜視図であり、図2は、図1に示す自動分析装置を示す平面図である。図1では、自動分析装置のカバーが開いており、図2では、このカバーの図示は省略している。
【0022】
図1と図2に示す自動分析装置1は、例えば恒温槽内部に配置された反応槽に、血液や尿(以下、試料または検体という)と試薬庫に保持された試薬容器内の試薬とを分注させて、この反応槽内の反応液に光を照射して、反応槽内の反応液からの透過光を測定部で受光して、反応槽内の試料の成分濃度を測定して測定結果を報告する装置である。この自動分析装置1は、試料に含まれる成分の濃度あるいは活性値等を、試料と検査試薬との化学反応を利用して光学的にもしくは電気的に測定する。
【0023】
自動分析装置1は、試薬容器内の試薬は測定時に使用され、試薬容器内から試薬を反応槽に分注して試薬容器内の残りの試薬の量が減少して、測定に使用できる回数が予め決められている所定の回数以下になった場合には、その試薬容器は交換を要する試薬容器として、試薬が充填されている新しい試薬容器と交換することができるようになっている。
【0024】
図1に示すように、自動分析装置1は、本体部2と、本体部2に手動開閉可能に取り付けられたカバー3と、コンピュータ5と、液晶表示装置等の表示装置6を備えている。本体部2の上面部は作業テーブル4である。カバー3は、分析作業中は、カバー3により作業テーブル4の全体を閉鎖できる。このカバー3が作業テーブル4を閉じた場合には、本体部2の各部の要素が動作できるが、カバー3を開けると各部の要素の動作が安全のために停止するようになっている。
【0025】
図1と図2に示すように、作業テーブル4の上には、1つの試薬庫10、反応槽11、スタラー(攪拌機)12、測定部13、バーコードリーダ(BCR)14、洗浄部15、ラック置き場16、サンプリングプローブ17、第1試薬プローブ18、第2試薬プローブ19、第2搬送部20、第1搬送部(試薬自動ローディング)21、状態表示部24、試薬容器交換部40を有する。
【0026】
オペレータは、本体部2の前面部2F側に立って作業テーブル4上での必要な作業を行うことができる。このため、図1に示すように、本体部2の前面部2Fには、状態表示部24が左右方向Yに沿って、ラック置き場16に対応して配置されている。状態表示部24はオペレータが目視し易い前面部2Fに配置されている。これにより、オペレータは、作業中に状態表示部24が表示する内容を目視で確認できる。
【0027】
図2に示すように、バーコードリーダ(BCR)14、ラック置き場16、第2搬送部20、試薬容器交換部40は、作業テーブル4の前半分領域4Fに配置されている。これに対して、試薬庫10、反応槽11、スタラー(攪拌機)12、測定部13、洗浄部15、サンプリングプローブ17、第1試薬プローブ18、第2試薬プローブ19は、作業テーブル4の後半分領域4Rに配置されている。
【0028】
図2に示すように、試薬庫10は、10D方向に回転してインデックス可能であり、しかも試薬庫10は上部を覆うための回転カバー10Cを有する。試薬庫10の回転カバー10Cは、自動開閉可能である。回転カバー10Cが回転することで、試薬庫10の必要な部分を開き、他の部分は閉じておくことができる。試薬庫10は、試薬容器(試薬ボトル)を収容する円形状の容器である。試薬庫10内には、複数の扇型の試薬ラック10Rを収容している。試薬ラック10Rには複数の試薬容器30が格納され、別の試薬ラック10Rには別の種類の複数の試薬容器31が格納されている。試薬容器30の容量は試薬容器31の容量に比べて大きい。試薬容器30,31は、試薬庫10の試薬ラック10Rにできるだけ多く設置できるように、好ましくは台形型のプラスチック容器である。
【0029】
図2に示す反応槽11は、試薬と試料(検体)を化学反応させる容器である。反応槽11の付近には、スタラー12、測定部13、洗浄部15が配置されている。スタラー12は、反応槽11内の試薬と試料を攪拌して混ぜる。洗浄部14は、反応槽11中の反応セルを洗浄する。測定部13は、反応槽11に対して光を照射して、反応槽11からの透過光を受光して、反応槽11内の試料の成分濃度を測定して測定結果を図1のコンピュータ5に報告する。
【0030】
図1と図2に示すバーコードリーダ14は、試薬容器30,31や試薬容器キャリアに予め設定されたバーコードを読み取る識別情報取得手段の一例であり、試薬容器30,31内の試薬の識別情報である例えば試薬の種類を読み取ってコンピュータ5に報告する。また、反応槽11の付近には、別のバーコードリーダ14Rが配置されており、このバーコードリーダ14Rは、試薬庫10内に格納されている試薬容器30(あるいは試薬容器31)に予め設定されているバーコードを読み取る識別情報取得手段の一例であり、試薬容器30,31内の試薬の識別情報である例えば試薬の種類を読み取ってコンピュータ5に報告する。
【0031】
図2に示すサンプリングプローブ17は、K方向に回転可能であり、検体ラック200から検体を吸引して反応槽11内に供給する。第1試薬プローブ19と第2試薬プローブ18は、それぞれV方向に回転可能であり、第1試薬プローブ19は、試薬庫10の内周側もしくは外周側の試薬容器30(あるいは試薬容器31)の口部から試薬を吸引して反応槽11内に供給する。第2試薬プローブ18は、試薬庫10の内周側もしくは外周側の試薬容器30(あるいは試薬容器31)の口部から試薬を吸引して反応槽11内に供給する。
【0032】
図1と図2に示すラック置き場16は、本体部2の前面部2F側において、左右方向Yに沿って水平方向に配置されている。このようにラック置き場16が前面部2Fに配置されているのは、オペレータがラック置き場16に対して、例えば新しい試薬容器の試薬容器キャリアを置いたり、交換を要する試薬容器の試薬容器キャリアを取り除いたりする作業を容易にできるからである。図2の左右方向Yは、前後方向Xと上下方向Zに対して直交している。
【0033】
図3は、試薬容器交換部40の第1試薬容器置き場22と第2試薬容器置き場23、ラック置き場16の一部、試薬庫10等を示す斜視図である。図4は、第1試薬容器置き場22と第2試薬容器置き場23の平面図である。
【0034】
図1と図2に示すように、試薬容器交換部40は、第1試薬容器置き場22と第2試薬容器置き場23を有している。
【0035】
図1と図2に示す第2搬送部20は、ラック置き場16の配置位置に対応してガイドレール33に沿って、搬送方向T(第2搬送方向の一例)に移動して位置決め可能である。第2搬送部20は、ラック部16と、試薬容器交換部40との間で、試薬容器30(あるいは試薬容器31)を持って移動して交換することができる。搬送方向Tは、左右方向Yと平行である。
【0036】
図2と図3に示すように、第1搬送部21は、作業テーブル4の後半分領域4Rの左側位置P3に待機されているが、第1搬送部21の試薬容器掴み機構部60は、前半分領域4Fの試薬容器交換部40をカバーできる範囲にまで伸張可能である。第1搬送部21は、試薬庫10と試薬容器交換部40との間で、試薬容器を持って移動して交換することができる。
【0037】
図2に示すように、試薬容器交換部40の第1試薬容器置き場22と第2試薬容器置き場23は、前半分領域4Fの左側位置の位置P1、P2にそれぞれ配置されている。これらの位置P1、P2は、ラック置き場16の一端部側に配置されている。位置P1は、位置P2に比べて後半分領域4Rの試薬庫10に近く、位置P2は、位置P1に比べて本体部2の前面部2Fに近い。しかも、試薬容器交換部40は、試薬庫10とラック置き場16のそれぞれに近い位置に配置されている。試薬容器交換部40は、第1搬送部21の第1搬送方向Wと、第2搬送部20の第2搬送方向Tが交差する領域に配置されている。
【0038】
図2に示す試薬容器交換部40では、第1試薬容器置き場22と第2試薬容器置き場23は隣接して配置されており、第1試薬容器置き場22は試薬容器を第2搬送部20に受け渡すための受け渡し場所である。図3と図4に示す第1試薬容器置き場22は、ラック置き場16から運ばれてくる新しい試薬容器を一時的に置く場所である。
【0039】
第2試薬容器置き場23は、交換を要する試薬容器と新しい試薬容器の交換速度を速めるために設けられた試薬容器の一時退避場所である。つまり、第2試薬容器置き場23は、試薬庫10から運ばれてくる交換を要する試薬容器を一時的に置く場所である。
【0040】
この交換を要する試薬容器とは、例えば試薬容器内の試薬が一定値以上無くなった空の試薬容器である。新しい試薬容器とは、新たに準備され予め試薬が充填されている試薬容器である。このように、試薬容器交換部40には、第1試薬容器置き場22と第2試薬容器置き場23の合計2つの試薬容器の一時置き場を備えており、第1試薬容器置き場22と第2試薬容器置き場23はお互いに近い位置で隣り合せに配置することで、新しい試薬容器を試薬庫10へ運ぶまでの時間を短縮することができる。
【0041】
ここで、図5を参照して、試薬容器30,31の形状例と、試薬容器キャリア44を説明する。
【0042】
図5(A)には、試薬容器30,31が試薬容器キャリア44に着脱可能に搭載されている状態を示し、図5(B)は、2種類の内容量の異なるプラスチック製の試薬容器30,31の形状例を示している。試薬容器30,31はそれぞれ同じ大きさの口部45を有している台形型の容器あるいは扇型の容器であり、図2に示す第1試薬プローブ19と第2試薬プローブ18は、口部45を通じて内部の試薬を吸引することができるようになっている。
【0043】
図5(B)に示す大型の試薬容器30の容量は、例えば90mLであり、小型の試薬容器31の容量は、例えば55mLである。試薬容器30,31は、上から見てほぼ台形型の容器である。第1側面部30Fと第2側面部30Fと端面部30R、30Pを有している。口部45側の端面部30Rの幅G1が反対側の端面部30Pの幅G2に比べて大きく、第1側面部30Fと第2側面部30Fは端面部30P側に先細りになるように互いに傾斜している。同様にして、試薬容器31は第1側面部31Fと第2側面部31Fと端面部31R、31Pを有している。口部45側の端面部31Rの幅G3が反対側の端面部30Pの幅G4に比べて大きく、側面部31F、31Fは端面部31P側に先細りになるように互いに傾斜している。
【0044】
図5(A)に示すように、試薬容器30,31には識別用のバーコード46が貼り付けられており、試薬容器キャリア44にも同じ識別用のバーコード47が貼り付けられている。これらのバーコード46,47は、図2に示すバーコードリーダ14により読み取ることで、試薬容器30,31内の試薬の種類等の識別情報を得ることができる。
【0045】
図1と図2に示すように、ラック置き場16は複数のラック溝部16Mを有している。図2と図6の例示するように、各ラック溝部16Mには、オペレータが手動で上記試薬容器キャリア44や検体ラックを着脱可能に並べて配置できる。また、交換を要する試薬容器を収めた試薬容器キャリア44をラック溝部16Mに戻して配置できる。これにより、オペレータは交換を要する試薬容器や新しい試薬容器等の交換が簡単に行える。
【0046】
図6は、図1と図2に示す状態表示部24の一部を示している。状態表示部24は、複数の点灯表示ユニット50を有している。状態表示部24は、ラック置き場16に対応して配置されており、各点灯表示ユニット50は、それぞれラック溝部16Mに対応して左右方向Yに沿って配置されている。
【0047】
各点灯表示ユニット50は、第1ランプ50Aと第2ランプ50Bを有している。図6における点灯表示ユニット50の点灯例では、第1ランプ50Aだけが点灯することで、ラック溝部16Mに置かれた試薬容器が新しい試薬容器30であることを示し、第2ランプ50Bだけが点灯することで、ラック溝部16Mに置かれた試薬容器が新しい試薬容器31であることを示し、第1ランプ50Aと第2ランプ50Bの両方が点灯することで、ラック溝部16Mに置かれた試薬容器が交換を要する試薬容器であることを示す。この点灯例はあくまで一例であり、特に限定されることはない。これにより、状態表示部24の点灯表示ユニット50が点灯することで、オペレータは作業中にどのような試薬容器が配置されているか、つまり試薬容器の状態を目視で確実に認識することができる。
【0048】
次に、図7を参照して、第2搬送部20の構造例を説明する。
【0049】
図7に示す第2搬送部20は、搬送方向Tのガイドレール33に沿って移動して位置決め可能である。第2搬送部20は、ラック置き場16と、試薬容器交換部40(第1試薬容器置き場22あるいは第2試薬容器置き場23)と、の間を移動し、試薬容器の取り外しと持ち運びが可能である。
【0050】
第2搬送部20は、ベース47、モータ48,49,50、アーム基部51、アーム52を有している。ベース47は、モータ48の作動によりガイドレール33に沿って移動して位置決め可能である。アーム基部51はモータ49を有しており、モータ49の作動により、アーム52はアーム基部51に対して上下軸53を中心としてC方向に回転可能である。アーム52の先端部には把持部55を有しており、把持部55は図5に示す試薬容器キャリア44の突出部58を把持する。これにより、第2搬送部20は、試薬容器キャリア44を持って試薬容器キャリア44をラック置き場16のラック溝部16Mと試薬容器交換部40(第1試薬容器置き場22あるいは第2試薬容器置き場23)との間で搬送することができる。
【0051】
図7のモータ基部51とアーム52は、ベース47のモータ50の駆動によりZ方向に移動可能である。これにより、把持部55は、ラック置き場16のラック溝部16Mに配置された試薬容器キャリア44の突出部58を把持してZ方向に持ち上げて、左右方向Yと前後方向Xに移動する。これにより、第2搬送部20の把持部55は、例えば第1試薬容器置き場22とラック置き場16のラック溝部16Mとの間で新しい試薬容器30(31)の試薬容器キャリア44を運ぶことができ、新しい試薬容器30(31)の試薬容器キャリア44はラック置き場16から第1試薬容器置き場22に一時的に置くことができる。
【0052】
また、第2搬送部20の把持部55は、例えば第1試薬容器置き場22に置かれた交換を要する試薬容器30(31)の試薬容器キャリア44をラック置き場16のラック溝部16Mに戻すことができる。各モータ48,49,50は、制御部100に電気的に接続されており、制御部100はコンピュータ5に電気的に接続されている。
【0053】
次に、図2と図3に示す第1搬送部21の構造例を、図8を参照して説明する。
【0054】
図2と図3に示す第1搬送部21は、第2搬送部の一例であり、作業テーブル4の後半分領域4Rの左側位置P3に収縮した状態で待機している。しかし、図8と図2に示すように、第1搬送部21は、前半分領域4Fの試薬容器交換部40に向けて搬送方向W(第1搬送方向の一例)に伸縮可能である。第1搬送部21の試薬容器掴み機構部60が、試薬庫10と、試薬容器交換部40の第1試薬容器置き場22あるいは第2試薬容器置き場23と、の間で、試薬容器30(31)だけを持って移動する。すなわち、第1搬送部21の試薬容器掴み機構部60は試薬容器だけを把持するが、試薬容器キャリア44は把持しないので、試薬容器キャリア44は第1試薬容器置き場22あるいは第2試薬容器置き場23に残しておく。
【0055】
図8に示すように、第1搬送部21を使用しない時には、W2方向に収縮して作業テーブル4の後半分領域4Rの左側位置P3おいて収縮状態で待機されている。しかし、第1搬送部21を使用する時には、作業テーブル4の後半分領域4Rの左側位置P3から、試薬庫10と試薬容器交換部40の第1試薬容器置き場22あるいは第2試薬容器置き場23まで、搬送方向Wに直線移動可能である。
【0056】
図8に示す第1搬送部21は、基部61、試薬容器掴み機構部60、スライド機構部62、上下移動機構部63、回転機構部64を有する。
【0057】
基部61は、アーム61Aとモータ61Mを有している。モータ61Mを作動することでスライド機構部62を伸縮させる。スライド機構部62は、アーム61Aに取り付けられており、モータ62Mと複数のベルト62Bとスライド部材62S、62Tを有する。モータ61Mを作動して2つのベルト62Bを駆動することで、スライド部材62S、62Tは、アーム61Aに対してW1方向に伸長しあるいはW2方向に収縮できる。
【0058】
図8の上下移動機構部63の軸部63Cは回転機構部64を保持している。上下移動機構部63はモータ62Mを作動することでZ方向に上下移動させる。回転機構部64は、試薬容器掴み機構部60を保持しており、モータ64Mを有する。回転機構部64は、モータ64Mを作動することで、回転中心軸CLを中心にしてR方向に回転可能である。
【0059】
このような第1搬送部21の構造を採用することで、第1搬送部21の試薬容器掴み機構部60を使用しない時には、W2方向に収縮して作業テーブル4の後半分領域4Rの左側位置P3おいて収縮状態で待機できる。しかし、第1搬送部21の試薬容器掴み機構部60を使用する時には、作業テーブル4の後半分領域4Rの左側位置P3から、試薬庫10と試薬容器交換部40のハンドオフポジション22あるいは第2試薬容器置き場23をカバーする領域まで、W1方向に沿って直線移動可能である。なお、各モータの動作は、制御部100により制御される。
【0060】
図8に示す試薬容器掴み機構部60の詳しい構造は図9〜図15に示している。次に、この試薬容器掴み機構部60の構造と動作例を説明する。
【0061】
図9は、試薬容器掴み機構部60を示す斜視図である。図10は、図9の試薬容器掴み機構部60をH1方向から見た背面側の斜視図である。図11は、図9の試薬容器掴み機構部60をH2方向から見た底面図である。図12は、図9の試薬容器掴み機構部60を斜め下方向から見た底面側の斜視図である。図13は、図9の試薬容器掴み機構部60の主な構成要素を示す斜視図である。図14は、試薬容器掴み機構部60の動作を示す図である。図15は、試薬容器掴み機構部60の試薬容器押し出し部120の動作を示す図である。
【0062】
図9と図10に示すように、試薬容器掴み機構部60は、基部70、回転中心軸CL、2枚の第1挟み部材(パドルともいう)71と第2挟み部材(パドルともいう)72、モータ73、プーリ74,75、ベルト76、挟み部材操作部80、試薬容器押し出し部120(図10を参照)、駆動部180を有する。図10では、図9に示す基部70が取り除かれて挟み部材操作部80と試薬容器押し出し部120が露出している。
【0063】
図9の回転中心軸CLは基部70からZ方向に突出して設けられている。挟み部材操作部80は基部70の内部に配置されている。駆動部180は、モータ73、プーリ74,75、ベルト76を有する。モータ73の出力軸にはプーリ74が固定されている。小径のプーリ74と大径のプーリ75にはベルト76がかかっており、モータ73の出力軸の回転駆動力は、小径のプーリ74と大径のプーリ75とベルト76を介してシャフト77に伝達される。
【0064】
図10に示すように、モータ73は保持板78に固定されている。保持板78と反対の側の保持板79がZ方向に沿って平行に間隔をおいて配置されている。図11と図12に示すように、保持板78,79と保持板81,82,82Dは基部70を形成しており、挟み部材操作部80と試薬容器押し出し部120を覆うためのケーシングを形成している。
【0065】
図10〜図13を参照して、挟み部材操作部80の構造を説明する。
【0066】
挟み部材操作部80は、基部70の保持板78,79と保持板81,82,82Dで囲まれる収納空間内に収容されている機構部分であり、第1挟み部材71と第2挟み部材72をM方向に沿って移動することで互いに近づいたり遠ざかって、図5に示す試薬容器30と試薬容器31のいずれも着脱可能に挟んでつかむことができる。
【0067】
図10と図13に示すシャフト77は、基部70の保持板81,82に対してN方向に平行に配置されて回転可能である。シャフト77には、第1カム91と第2カム92が間隔をおいて固定されており、第1カム91の長軸と第2カム92の長軸は同じ向きである。図13に示すように、2つのガイド軸部93,94は、M方向に沿って平行に配置され、基部70の保持板78,79に対して固定されている。N方向とM方向とZ方向は、互いに直交している。ガイド軸部93には2つのスプリング93Sが同軸状に配置され、ガイド軸部94には2つのスプリング94Sが同軸状に配置されている。
【0068】
図11と図13に示すように、第1挟み部材71は第1スライダ95を有し、第2挟み部材72は第2スライダ96を有している。第1スライダ95と第2スライダ96の貫通穴には、ガイド軸部93,94がそれぞれ通されており、第1スライダ95と第2スライダ96はガイド軸部93,94に沿ってM方向にスライド可能である。
【0069】
第1スライダ95の下部には第1挟み部材71が固定され、第2スライダ96の下部には第2挟み部材72が固定されている。第1挟み部材71と第2挟み部材72は、第1スライダ95と第2スライダ96からZ1方向(下方向)に突出している。第1スライダ95と保持板78の間にはスプリング93S、94Sが介在されている。同様にして、第2スライダ96と保持板79の間にはスプリング93S、94Sが介在されている。
【0070】
図13に示すように、第1スライダ95は2つのカム受けブロック98を有し、第2スライダ96は2つのカム受けブロック99を有している。各カム受けブロック98、99にはローラ102が回転可能に支持されている。第1カム91側の2つのローラ102は第1カム91のカム倣い面に対して、スプリング93S、93Sの力により押し付けられて接触している。第2カム92側の2つのローラ102は第2カム92のカム倣い面に対して、スプリング94S、94Sの力により押し付けられて接触している。第1カム91と第2カム92は、共にほぼ楕円形のカム倣い面を有する。
【0071】
図13に示すように、第1カム91は第2カム92に比べて大きい。第1挟み部材71と第2挟み部材72は、図11に示すように、角度θだけ開いた状態で、第1スライダ95と第2スライダ96に対してそれぞれ固定されている。つまり、第1挟み部材71と第2挟み部材72の第1間隔E1は、第1挟み部材71と第2挟み部材72の第2間隔E2に比べて大きくなっている。このように第1挟み部材71と第2挟み部材72がN方向に平行ではなく角度θで開いた状態になっているのは、図5に示す試薬容器30(31)の形状に対応しているためであり、試薬容器30の両側の側面部30F、30Fと試薬容器31の両側の側面部31F、31Fに密着して確実に挟んでつかめるようにするためである。
【0072】
また、図9と図10に示すように、第1挟み部材71の内面と第2挟み部材72の内面には、試薬容器30,31が滑り落ちないようにして試薬容器30,31を確実に保持するために、好ましくは滑り止めの表面処理により滑り止め部材SBが施されているか、シート状の滑り止め部材SBが貼り付けられている。例えば滑り止め部材としては、耐薬品性の高いシリコンゴムを採用できるが、特に限定されない。これにより、第1挟み部材71と第2挟み部材72は試薬容器を確実につかんでおくことができ、停電時でも試薬容器を保持する力を失うことが無く試薬容器の落下を防げる。
【0073】
次に、図13と図14を参照して、上述した試薬容器掴み機構部60が、図5に示す試薬容器30,31をつかむ動作を説明する。図14は、第1挟み部材71と第2挟み部材72により試薬容器30,31を挟んでつかむ様子を示している。
【0074】
図13に示すように、第1カム91と第2カム92の長軸部分SSが、Z方向に向いている状態が初期状態である。この初期状態における第1挟み部材71と第2挟み部材72の相対的な位置を図14(A)に示す。
【0075】
図14(B)と図14(C)は、大型の試薬容器30を挟んだり離したりする様子を示している。図14(B)では、第1挟み部材71と第2挟み部材72が大型の試薬容器30を挟んでつかんでいる状態を示し、図14(C)では、第1挟み部材71と第2挟み部材72が大型の試薬容器30を挟む前の離した状態を示している。図14(B)から図14(C)に示すように、第1カム91と第2カム92の長軸部分SSが垂直から水平に90度回転すると、第1挟み部材71と第2挟み部材72は、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72の間に試薬容器30を確実に挿入できる。
【0076】
そして、図14(C)から図14(B)に示すように、第1カム91と第2カム92の長軸部分SSが水平から垂直に90度逆回転すると、第1挟み部材71と第2挟み部材72はスプリング93S、94Sの力によりM1方向に互いに近づくので、第1挟み部材71と第2挟み部材72は試薬容器30をつかむことができる。また、第1挟み部材71と第2挟み部材72から試薬容器30を離す場合には、図14(B)から図14(C)に示すように、第1カム91と第2カム92の長軸部分SSが垂直から水平に90度回転され、第1挟み部材71と第2挟み部材72が、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72から試薬容器30を確実に離すことできる。
【0077】
同様に、図14(D)と図14(E)は、小型の試薬容器31を挟んだり離したりする様子を示している。図14(D)では、第1挟み部材71と第2挟み部材72が小型の試薬容器31を挟んでつかんでいる状態を示し、図14(E)では、第1挟み部材71と第2挟み部材72から小型の試薬容器31を挟む前の離した状態を示している。 図14(D)から図14(E)に示すように、第1カム91と第2カム92の長軸部分SSが垂直から斜め45度回転すると、第1挟み部材71と第2挟み部材72は、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72の間に試薬容器31を確実に挿入できる。
【0078】
そして、図14(E)から図14(D)に示すように、第1カム91と第2カム92の長軸部分SSが斜め方向から垂直に45度逆回転すると、第1挟み部材71と第2挟み部材72はスプリング93S、94Sの力によりM1方向に互いに近づくので、第1挟み部材71と第2挟み部材72は試薬容器31を確実につかむことができる。
【0079】
また、図14(D)から図14(E)に示すように、第1挟み部材71と第2挟み部材72から試薬容器31を離す場合には、第1カム91と第2カム92の長軸部分SSが垂直から斜め45度回転され、第1挟み部材71と第2挟み部材72が、スプリング93S、94Sの力に抗してM2方向に互いに押し広げられて離れるので、第1挟み部材71と第2挟み部材72から試薬容器31を確実に離すことできる。
【0080】
これにより、試薬容器掴み機構部60は、試薬容器30(31)を安全に確実に挟んでつかむことで交換することができ、自動分析装置1を扱うオペレータの負担を減らすことができる。
【0081】
ここで、図2の試薬庫10から交換を要する試薬容器を取り出す場合の動作例にあげる。
【0082】
この場合には、図9の第1挟み部材71と第2挟み部材72が試薬容器30(試薬容器31)の上方に待機される。図13の駆動部180のモータ73が作動して、第1挟み部材71と第2挟み部材72の間隔が4つのスプリング93S、94Sの力に抗して押し広げられる。そして、第1挟み部材71と第2挟み部材72の間隔が試薬容器30(試薬容器31)を挟んでつかむのに十分な値になると、図13に示す試薬容器掴み機構部60がZ1方向に下がり、第1挟み部材71と第2挟み部材72が試薬容器30(31)の2つの側面部30F、30F(31F、31F)に対面する。
【0083】
図13のモータ73を逆回転させると、第1挟み部材71と第2挟み部材72の間隔がスプリング93S、94Sの力により狭まって試薬容器30の両側の側面部30F、30F(試薬容器31の両側の側面部31F、31F)を挟んでつかむことができる。そして、図13の試薬容器掴み機構部60がZ2方向に上がれば、図2の試薬庫10から試薬容器30(試薬容器31)を取り出すことができる。また、図13の試薬容器掴み機構部60は、同様の要領により、新しい試薬容器30(試薬容器31)を試薬庫10内に格納できる。
【0084】
このように、試薬容器掴み機構部60の第1挟み部材71と第2挟み部材72は、大型の試薬容器30であっても小型の試薬容器31であっても、確実にはさんでつかみ、そして離すことで、試薬容器のスムーズな搬送と交換ができる。
【0085】
試薬容器掴み機構部60は、複数の異なるカム幅を有する2つのカムを配置して、これらのカム幅に合わせて第1挟み部材71と第2挟み部材72の間隔を変えることで、互いに異なる大きさの複数の試薬容器を保持することができる。第1挟み部材71と第2挟み部材72は、試薬容器の口部を挟むのではなく、試薬容器の側面部に当てて挟んでつかむ。従って、試薬容器の口部に試薬が着いていたとしても、試薬が第1挟み部材71と第2挟み部材72には付着せず、試薬が第1挟み部材71と第2挟み部材72を介して他の試薬容器に付着して反応することを防ぐことができる。これにより、試薬容器の交換が安全にでき、精度良い分析作業を行うことができ、試薬容器を確実に保持できる。
【0086】
第1カム91と第2カム92が初期位置から任意の角度だけ回転することで、第1挟み部材71と第2挟み部材72は任意の間隔だけ広げることができる。第1挟み部材71と第2挟み部材72は、複数のスプリング93S、94Sの力を用いて試薬容器30(試薬容器31)を機械的に挟んでつかむ構造であるので、仮に停電した場合であっても、試薬容器30(試薬容器31)を挟んでつかむ状態をそのままスプリングの機械的な力により維持することができる。これにより、停電した場合であっても、試薬容器が第1挟み部材71と第2挟み部材72の間から落下する現象を確実に防ぐことができる。
【0087】
第1挟み部材71と第2挟み部材72は、好ましくは薄板状の部材である。従って、試薬庫10内では複数の試薬容器30(試薬容器31)が非常に小さい隙間を空けて密集して配列されている。しかも、第1挟み部材71と第2挟み部材72は第1カムカム91と第2カム92の回転により初期位置から少し開くようになっている。従って、これらの隙間を利用して、これ等の隙間には第1挟み部材71と第2挟み部材72を入れることで、任意の位置の試薬容器30(試薬容器31)を挟んでつかむことができる。つまり、試薬容器が密集した試薬庫10内でも、異なる内容量を有する試薬容器30と試薬容器31をそれぞれ確実に交換することができる。
【0088】
図15は、試薬容器掴み機構部60の試薬容器押し出し部120を示している。図15(A)では、試薬容器30(試薬容器31)が第1挟み部材71と第2挟み部材72によりつかまれている状態を示し、図15(B)では、試薬容器30(試薬容器31)から第1挟み部材71と第2挟み部材72が離れて、試薬容器30(試薬容器31)がスプリング123の力によりZ1方向に強制的に押し出される様子を示している。
【0089】
図15に示す試薬容器押し出し部120は、図11と図12にも示しており、第1挟み部材71と第2挟み部材72の間に配置されている。試薬容器押し出し部120は、支持部材121、押出しピン122、スプリング123を有している。支持部材121は、基部70に対して、水平に固定されている。押出しピン122は支持部材121に対して直交するZ方向に移動可能に保持されている。押出しピン122は支持部材121の穴125を通っており抜け止め部材126を有する。スプリング123は、押出しピン122に対して同軸状に、支持部材121の下面と押出しピン122の先端部124の間に配置されている。
【0090】
図15(A)に示すように、第1挟み部材71と第2挟み部材72が試薬容器30(試薬容器31)をつかんでいる場合には、押出しピン122の先端部124が試薬容器30(試薬容器31)の上面30T(31T)にスプリング123の力に抗して押し当てられ、押出しピン122はZ2方向に上昇している。そして、第1挟み部材71と第2挟み部材72の間隔が開いて試薬容器30(試薬容器31)を離すと、試薬容器30(試薬容器31)は、スプリング123の力によりZ1方向に強制的に押し出される。
【0091】
これにより、試薬容器30(試薬容器31)の上面30T(31T)が、押出しピン122によりZ1方向に押し下げられる構造を採用しているので、試薬容器30(試薬容器31)は、第1挟み部材71と第2挟み部材72から確実に離すことができ、試薬容器30(試薬容器31)が第1挟み部材71と第2挟み部材72に対して貼りついてしまって取り出せない現象を確実に防ぐことができる。
【0092】
次に、図2を主に参照して、上述した自動分析装置1の自動分析動作例を説明する。
【0093】
図2において、ラック置き場16には試料容器(検体容器ともいう)200が置かれる。第2搬送部20が試料容器200をピックアップしてバーコードリーダ14によりバーコードを読む。そして、第2搬送部20が試料容器200を作業テーブル4の前面に置く。サンプリングプローブ17が試料容器200内から試料(検体)を吸引して反応槽11内に運ぶ。
【0094】
図2の第1試薬プローブ19が、試薬庫10内の試薬容器30(あるいは試薬容器31)から第1試薬を吸引して反応槽11内に供給する。スタラー12が反応槽11内の試料と第1試薬を混ぜる。次に、第2試薬プローブ18が、試薬庫10内の試薬容器30(あるいは試薬容器31)から第2試薬を吸引して反応槽11内に供給する。スタラー12が反応槽11内の試料と第1試薬と第2試薬を混ぜる。
【0095】
そして、図2の測定部13が、反応槽11に光を照射して、反応槽11からの透過光を受光して、反応槽11内の試料の成分濃度を測定して測定結果を図1のコンピュータ5に報告する。その後、洗浄部14は反応槽11中の反応セルを洗浄する。このようにして、自動分析装置1は試料の自動分析を行うことができる。
【0096】
次に、自動分析装置1では、試薬容器内の試薬は測定時に使用され、試薬容器内の試薬の量が減少して、測定に使用できる回数が予め決められている所定の回数以下になった場合には、その試薬容器は交換を要する試薬容器として、試薬が充填されている新しい試薬容器と交換する必要がある。
【0097】
そこで、このような交換を要する試薬容器(古い試薬容器)と新しい試薬容器との交換手順を、図2、図3、図16等を主に参照して説明する。図16は、図2の第1搬送部21の動作をステップS2〜S5に示し、図2の第2搬送部20の動作をステップS11〜S14に示している。
【0098】
図2と図3に示すように、第1搬送部21は、作業テーブル4の後半分領域4Rの左側位置P3に待機されている。
【0099】
図16のステップS1では、図1に示すコンピュータ5が、図2の試薬庫10で試薬容器30(あるいは試薬容器31)における試薬残量が予め設定された値を下回ったことを検知(交換を要する試薬容器、空の容器であると検知)したら、「交換を要する試薬容器に代えて試薬庫10に新しい試薬容器を設定してください」との警告メッセージを例えば図1の表示装置6に表示する。試薬容器30(あるいは試薬容器31)における試薬残量は、この試薬容器から試薬が吸引された回数で求めることができる。
【0100】
一方、図16のステップS10では、オペレータが、図5に示す新しい試薬容器30(あるいは試薬容器31)を入れた試薬容器キャリア44を、図2のラック置き場16にセットする。
【0101】
図16のステップS2では、試薬庫10の回転カバー10Cを自動で開ける。図2に示す第1搬送部21が試薬庫10へ交換を要する試薬容器30(あるいは試薬容器31)を取りに行き、図9に示す第1搬送部21の試薬容器掴み機構部60は、交換を要する試薬容器30(あるいは試薬容器31)を挟んでつかむ。
【0102】
ステップS3では、図8に示す第1搬送部21の試薬容器掴み機構部60は、スライド機構部62によりW1方向に直線移動され、上下移動機構部63により上下動作され、そして回転機構部64により回転されることで、交換を要する試薬容器30(あるいは試薬容器31)を図2の試薬容器交換部40の第2試薬容器置き場23に置く。このようにして、交換を要する試薬容器30(あるいは試薬容器31)は、試薬庫10から第2試薬容器置き場23に運ぶことができる。
【0103】
一方、図16のステップS11では、第2搬送部20が図2のラック置き場16の新しい試薬容器が入った試薬容器キャリア44をバーコードリーダ14に運んで、図5のバーコード46,47の一方もしくは両方を読み取る。ステップS12では、バーコードリーダ14がバーコードを読み取ることで、新しい試薬容器であることを確認する。
【0104】
試薬容器の交換のタイミングが近づいたら。ステップS13では、第2搬送部20は新しい試薬容器30(あるいは試薬容器3)を、図2の第1試薬容器置き場22に置く。
【0105】
図16のステップS4では、図8に示す第1搬送部21の試薬容器掴み機構部60は、第1試薬容器置き場22に置かれている新しい試薬容器30(あるいは試薬容器31)だけをつかんで試薬容器キャリア44から取って、試薬庫10内に運ぶ。
【0106】
ステップS5では、第1搬送部21の試薬容器掴み機構部60は、第2試薬容器置き場23にある交換を要する試薬容器30(あるいは試薬容器31)を取りに行って、第1試薬容器置き場22の試薬容器キャリア44内に置く。そして、図16のステップS14では、第2搬送部20は、第1試薬容器置き場22に置かれた交換を要する試薬容器30(あるいは試薬容器31)を試薬容器キャリア44と一緒にラック置き場16のラック溝部16Mに運ぶ。
【0107】
本発明の自動分析装置の実施形態では、交換を要する試薬容器と新しい試薬容器を交換する作業時間を短くして、新しい試薬容器を早く試薬庫に運び込むことができ、分析作業効率の向上が図れ、試薬容器の交換作業の効率の向上が図れる。
【0108】
以上説明した本発明の自動分析装置1は、検体と試薬容器から分注した試薬とを反応させて反応液の特性を測定することで前記検体を分析する自動分析装置であって、
複数の試薬容器を格納する試薬庫と、複数の試薬容器を配置するラック置き場と、試薬庫とラック置き場に隣接して設けられて試薬容器を一時的に配置する試薬容器交換部と、試薬庫と試薬容器交換部との間で試薬容器を搬送する第1搬送部21と、試薬容器交換部とラック置き場との間で試薬容器を搬送する第2搬送部20と、を備え、試薬容器交換部は、第2搬送部によりラック置き場から運ばれた新しい試薬容器を一時的に置き、第1搬送部により試薬庫から運ばれた交換を要する試薬容器を一時的に退避させて置く試薬容器置き場を有し、試薬容器交換部は、第1搬送部が試薬容器を搬送する搬送方向に沿った位置に配置されていることを特徴とする。これにより、試薬容器の交換作業の効率の向上を図ることができる。
【0109】
自動分析装置1では、試薬容器交換部の試薬容器置き場は、第2搬送部によりラック置き場から運ばれた新しい試薬容器を一時的に置く第1試薬容器置き場22と、第1搬送部により試薬庫から運ばれた交換を要する試薬容器を一時的に退避させて置く第2試薬容器置き場23であることを特徴とする。これにより。交換を要する試薬容器と新しい試薬容器を別々の置き場に一時的に置くことができ、交換を要する試薬容器と新しい試薬容器を交換する作業時間を短くして、新しい試薬容器を早く試薬庫に運び込むことができ、分析作業効率の向上が図れる。
【0110】
また、自動分析装置1では、試薬容器交換部は、第1搬送部が試薬容器を搬送する搬送方向と、第2搬送部が試薬容器を搬送する搬送方向とが交差する位置に配置されている。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対して試薬容器を効率よく交換できる。
【0111】
試薬容器交換部では、第1試薬容器置き場と第2試薬容器置き場は、並べて隣接して配置されていることを特徴とする。これにより、第1搬送部と第2搬送部は、試薬容器交換部に対する搬送距離を短くして試薬容器を効率よく交換できる。
【0112】
第1搬送部は、第1試薬容器置き場に置かれた新しい試薬容器を試薬庫内に運び、第2試薬容器置き場に置かれた交換を要する試薬容器を第1試薬容器置き場に置き、第2搬送部は、第1試薬容器置き場に置かれた交換を要する試薬容器をラック置き場に戻すことを特徴とする。これにより、これにより、新しい試薬容器と交換を要する試薬容器を効率よく交換できる。
【0113】
第1試薬容器置き場とラック置き場との間と、第2試薬容器置き場とラック置き場との間では、試薬容器は試薬容器キャリアに装着された状態で第2搬送部により搬送されることを特徴とする。これにより、第2搬送部は、試薬キャリアを用いて、試薬容器を容易に搬送できる。
【0114】
ラック置き場に置かれた試薬容器が、交換を要する試薬容器であるか新しい試薬容器かを表示する状態表示部を備えることを特徴とする。これにより、オペレータは、作業中に試薬容器の状態を目視で認識できる。
【0115】
ラック置き場は、自動分析装置の前面部側に配置され、状態表示部は、ラック置き場に沿って配置されていることを特徴とする。これにより、オペレータは、新しい試薬容器をラック置き場に容易に置いたり、交換を要する試薬容器をラック置き場から容易に取り除くことができ、医薬容器の交換作業性が向上する。
【0116】
第2搬送部の搬送方向は前面部に沿っており、第1搬送部の搬送方向は、自動分析装置の隅部に沿っていることを特徴とする。これにより、第2搬送部の搬送動作は、前面部側で行えるので、自動分析装置の他の部分の動作の邪魔にならず、第1搬送部の搬送動作は、隅部で行えるので、同様にして自動分析装置の他の部分の動作の邪魔にならない。
【0117】
試薬容器と試薬容器キャリアには、試薬容器内の試薬の識別情報を有する識別情報ラベルが配置されており、ラック置き場には、識別情報ラベルから識別情報を取得する識別情報取得手段が配置されていることを特徴とする。これにより、試薬容器の試薬の識別を確実に行える。
【0118】
本発明は上記実施形態に限定されない。
【0119】
例えば、1つの試薬庫10が配置されているが、2つ以上の試薬庫を配置しても良い。
【0120】
図17は、本発明の別の実施形態を示している。図17に示す試薬容器掴み機構部60Aは、2本のリニアガイド130,131を有している。リニアガイド130は2つの滑りブロック132を備え、リニアガイド131は2つの滑りブロック133を有している。2つの滑りブロック132はリニアガイド130に沿ってM方向にスライド自在であり、2つの滑りブロック133はリニアガイド131に沿ってM方向にスライド自在である。滑りブロック132,133には、第1挟み部材71と第2挟み部材72が取り付けられている。リニアガイド130の滑りブロック132,132間には、引張バネが取り付けられ、リニアガイド131の滑りブロック133,133間には、別の引張バネが取り付けられている。滑りブロック132,132間には、大きいカムが配置され、滑りブロック133,133には小さいカムが配置されている。また、リニアガイドの他にスプラインレールを用いることができる。
【0121】
また、1つの試薬庫が設けられているが、複数の試薬庫を設けるようにしても良い。ラック置き場には、置かれた新しい試薬容器の識別情報を取得する識別情報取得手段としてのバーコードリーダが配置され、試薬容器や試薬容器キャリアにはバーコードが配置されている。しかし、これに限らず試薬容器や試薬容器キャリアにはICチップなどの他の種類の識別情報ラベルを配置して、識別情報取得手段が識別情報ラベルからの識別情報を取得するようにしても良い。
【0122】
さらに、本発明の実施の形態に開示されている複数の構成要素を適宜組み合わせることにより種々の発明を形成できる。例えば、本発明の実施の形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施の形態に亘る構成要素を適宜組み合わせてもよい。
【符号の説明】
【0123】
1 自動分析装置
2 本体部
3 カバー
4 作業テーブル
10 試薬庫
10R 試薬ラック
11 反応槽
13 測定部
14 バーコードリーダ(識別情報取得手段の一例)
16 ラック置き場
17 サンプリングプローブ
18 第2試薬プローブ
19 第1試薬プローブ
20 第2搬送部
21 第1搬送部
22 第1試薬容器置き場
23 第2試薬容器置き場
24 状態表示部
30,31 試薬容器
30F、31F 試薬容器の側面部
40 試薬容器交換部
44 試薬容器キャリア
45 口部
55 第2搬送部の把持部
60 第1搬送部の試薬容器掴み機構部
61 基部
62 スライド機構部
63 上下移動機構部
64 回転機構部
70 基部
71 第1挟み部材
72 第2挟み部材
73 モータ
74,75 プーリ
76 ベルト76
80 挟み部材操作部
91 第1カム
92 第2カム
120 試薬容器押し出し部
180 駆動部
SB 滑り止め部材
W 移動方向(第1搬送方向の一例)
T 移動方向(第2搬送方向の一例)
【特許請求の範囲】
【請求項1】
検体と試薬容器から分注した試薬とを反応させて反応液の特性を測定することで前記検体を分析する自動分析装置であって、
複数の前記試薬容器を格納する試薬庫と、
複数の前記試薬容器を配置するラック置き場と、
前記試薬庫と前記ラック置き場に隣接して設けられて前記試薬容器を一時的に配置する試薬容器交換部と、
前記試薬庫と前記試薬容器交換部との間で前記試薬容器を搬送する第1搬送部と、
前記試薬容器交換部と前記ラック置き場との間で前記試薬容器を搬送する第2搬送部と、
を備え、
前記試薬容器交換部は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置き、前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く試薬容器置き場を有し、
前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する搬送方向に沿った位置に配置されていることを特徴とする自動分析装置。
【請求項2】
前記試薬容器交換部の前記試薬容器置き場は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置く第1試薬容器置き場と、
前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く第2試薬容器置き場を備えることを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する前記搬送方向と、前記第2搬送部が前記試薬容器を搬送する搬送方向とが交差する位置に配置されていることを特徴とする請求項1に記載の自動分析装置。
【請求項4】
前記試薬容器交換部では、前記第1試薬容器置き場と前記第2試薬容器置き場は、並べて隣接して配置されていることを特徴とする請求項2または請求項3に記載の自動分析装置。
【請求項5】
前記第1搬送部は、前記第1試薬容器置き場に置かれた新しい前記試薬容器を前記試薬庫内に運び、前記第2試薬容器置き場に置かれた交換を要する前記試薬容器を前記第1試薬容器置き場に置き、前記第2搬送部は、前記第1試薬容器置き場に置かれた交換を要する前記試薬容器を前記ラック置き場に戻すことを特徴とする請求項1〜請求項4のいずれか1つの項に記載の自動分析装置。
【請求項6】
前記第1試薬容器置き場と前記ラック置き場との間と、前記第2試薬容器置き場と前記ラック置き場との間では、前記試薬容器は試薬容器キャリアに装着された状態で前記第2搬送部により搬送されることを特徴とする請求項5に記載の自動分析装置。
【請求項7】
前記ラック置き場に置かれた前記試薬容器が、前記交換を要する前記試薬容器であるか新しい前記試薬容器かを表示する状態表示部を備えることを特徴とする請求項1〜請求項6のいずれか1つの項に記載の自動分析装置。
【請求項8】
前記ラック置き場は、前記自動分析装置の前面部側に配置され、前記状態表示部は、前記ラック置き場に沿って配置されていることを特徴とする請求項7に記載の自動分析装置。
【請求項9】
前記第2搬送部の前記搬送方向は前記前面部に沿っており、前記第1搬送部の前記搬送方向は、前記自動分析装置の隅部に沿っていることを特徴とする請求項8に記載の自動分析装置。
【請求項10】
前記試薬容器と前記試薬容器キャリアには、前記試薬容器内の試薬の識別情報を有する識別情報ラベルが配置されており、
前記ラック置き場には、前記識別情報ラベルから識別情報を取得する識別情報取得手段が配置されていることを特徴とする請求項1〜請求項9のいずれか1つの項に記載の自動分析装置。
【請求項1】
検体と試薬容器から分注した試薬とを反応させて反応液の特性を測定することで前記検体を分析する自動分析装置であって、
複数の前記試薬容器を格納する試薬庫と、
複数の前記試薬容器を配置するラック置き場と、
前記試薬庫と前記ラック置き場に隣接して設けられて前記試薬容器を一時的に配置する試薬容器交換部と、
前記試薬庫と前記試薬容器交換部との間で前記試薬容器を搬送する第1搬送部と、
前記試薬容器交換部と前記ラック置き場との間で前記試薬容器を搬送する第2搬送部と、
を備え、
前記試薬容器交換部は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置き、前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く試薬容器置き場を有し、
前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する搬送方向に沿った位置に配置されていることを特徴とする自動分析装置。
【請求項2】
前記試薬容器交換部の前記試薬容器置き場は、
前記第2搬送部により前記ラック置き場から運ばれた新しい前記試薬容器を一時的に置く第1試薬容器置き場と、
前記第1搬送部により前記試薬庫から運ばれた交換を要する前記試薬容器を一時的に退避させて置く第2試薬容器置き場を備えることを特徴とする請求項1に記載の自動分析装置。
【請求項3】
前記試薬容器交換部は、前記第1搬送部が前記試薬容器を搬送する前記搬送方向と、前記第2搬送部が前記試薬容器を搬送する搬送方向とが交差する位置に配置されていることを特徴とする請求項1に記載の自動分析装置。
【請求項4】
前記試薬容器交換部では、前記第1試薬容器置き場と前記第2試薬容器置き場は、並べて隣接して配置されていることを特徴とする請求項2または請求項3に記載の自動分析装置。
【請求項5】
前記第1搬送部は、前記第1試薬容器置き場に置かれた新しい前記試薬容器を前記試薬庫内に運び、前記第2試薬容器置き場に置かれた交換を要する前記試薬容器を前記第1試薬容器置き場に置き、前記第2搬送部は、前記第1試薬容器置き場に置かれた交換を要する前記試薬容器を前記ラック置き場に戻すことを特徴とする請求項1〜請求項4のいずれか1つの項に記載の自動分析装置。
【請求項6】
前記第1試薬容器置き場と前記ラック置き場との間と、前記第2試薬容器置き場と前記ラック置き場との間では、前記試薬容器は試薬容器キャリアに装着された状態で前記第2搬送部により搬送されることを特徴とする請求項5に記載の自動分析装置。
【請求項7】
前記ラック置き場に置かれた前記試薬容器が、前記交換を要する前記試薬容器であるか新しい前記試薬容器かを表示する状態表示部を備えることを特徴とする請求項1〜請求項6のいずれか1つの項に記載の自動分析装置。
【請求項8】
前記ラック置き場は、前記自動分析装置の前面部側に配置され、前記状態表示部は、前記ラック置き場に沿って配置されていることを特徴とする請求項7に記載の自動分析装置。
【請求項9】
前記第2搬送部の前記搬送方向は前記前面部に沿っており、前記第1搬送部の前記搬送方向は、前記自動分析装置の隅部に沿っていることを特徴とする請求項8に記載の自動分析装置。
【請求項10】
前記試薬容器と前記試薬容器キャリアには、前記試薬容器内の試薬の識別情報を有する識別情報ラベルが配置されており、
前記ラック置き場には、前記識別情報ラベルから識別情報を取得する識別情報取得手段が配置されていることを特徴とする請求項1〜請求項9のいずれか1つの項に記載の自動分析装置。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】

【図8】

【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】

【図16】
【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2010−276375(P2010−276375A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−126754(P2009−126754)
【出願日】平成21年5月26日(2009.5.26)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月26日(2009.5.26)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]