
Fターム[2B034BB01]の内容
Fターム[2B034BB01]に分類される特許
181 - 200 / 477
畦塗り機における前処理体用爪カバー
【課題】土砂を切削する畦切り爪を有する前処理体と整畦体を備える畦塗り機において、前処理体の畦切り爪による切削土砂の飛散範囲を制限し、整畦体の前方に集中させる。
【解決手段】畦塗り機10の前処理体7は、トラクタの後方に接続される支持フレーム13に連結される伝動フレーム14を通じ、トラクタから伝達される動力を受けて軸回りに回転し、整畦体8による畦の整形前に、整畦体8の前方に存在する土砂を切削する畦切り爪2と、畦切り爪2を包囲し、一部に開口を有する爪カバー本体4を備える。爪カバー本体4の開口に面する位置に、畦切り爪2が切削する土砂の飛散の方向を制御する方向制御部材6を接続する。
(もっと読む)
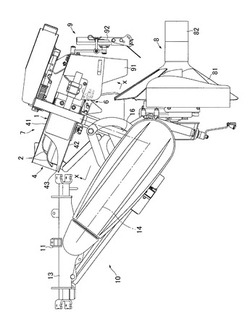
畦塗り作業機

【課題】移動時における走行機体と作業機との前後バランスを向上させ、精度の良い畦塗り整形作業を行える畦塗り作業機を提供すること。
【解決手段】走行機体90に装着される装着部5と、装着部5から左右方向に移動可能なオフセット機構部10と、オフセット機構部10の移動端側に設けられた回動支点Oを中心として、水平方向に回動可能に配設された前処理体21及び整畦体40を有する作業部20と、走行機体90から伝達される動力によって前処理体21及び整畦体40を回転駆動させる動力伝達機構部50とを備えてなる畦塗り作業機において、前処理体21は回転軸23と回転軸23に放射状に取付られる耕耘爪24とを備え、回動支点Oは平面視において整畦体40の回転中心軸上に設けられ、平面視において、整畦体40の回転中心軸の方向と前処理体21における耕耘爪24の取付方向との成す角度が鋭角となるように配置されていること。
(もっと読む)
連続整畦作業方法
【課題】走行機体の進行に沿ってオフセット位置で作業を行う畦塗り機を用いて、連続作業を中止することなく、隣り合う辺の連続整畦作業を可能にすること。
【解決手段】走行機体2の後方にこの走行機体2に対して水平回動または水平移動自在に架設される伝動部材の先端に水平回動自在に装着された作業部51と、作業部51の位置及び方位を検出するセンサ20からの情報に基づいて前記伝動部材の水平回動または水平移動の量と作業部51の水平回動の量を独立して無段階に制御し、走行機体2の旋回をともなう前進動時に作業部51を畦に沿わせたまま、その圃場の隅部付近までの直進性を維持させる制御手段とを備える畦塗り機50を用いて、圃場の一辺に対し直進整畦作業を行い、その終端部から隣り合う辺の始端部にかけては曲線整畦作業を行い、その後再び直進整畦作業を行うこと。
(もっと読む)
作業機
【課題】 本発明は、簡潔な構成で一部の作業部のみを着脱可能にし作業部の着脱作業の容易化を図ると共に、作業部として除草部を装着した場合、補助作業装置である整地装置が作業の邪魔にならない構成として良好な除草作業が行えるようにした作業機を得ることを課題とする。
【解決手段】 走行車体2の後側に昇降リンク装置3を介して縦リンク43を昇降可能に設け、該縦リンク43に前後方向の連結軸44を介して着脱用基部フレーム150を左右ローリング可能に設け、該着脱用基部フレーム150に上下動機構を介して整地ロータ27を上下動可能に支持させて設け、着脱用基部フレーム150に着脱される着脱ヒッチ151を介して除草部152を装着し、該除草部152を装着した状態で除草部152の下端よりも整地ロータ27が高位で地面に対して浮上する構成とした。
(もっと読む)
畦成形機
【課題】水田等の圃場の畦成形作業において、圃場の土壌条件に左右されずに強固な崩れにくい畦を成形できる畦成形機を提供する。
【解決手段】盛土部と、盛土部の移動方向の後方に設置される成畦部41とを有し、成畦部41は、上面ローラ413と、上面ローラ413の回転駆動力供給側に取り付けられ上面ローラ413の回転中心に向けた傾斜面を有する円錐状であり、表面は放射状の分割片414に分割され、それぞれの分割片414は回転方向に対して前進角を設けて側面視ジグザグ状に連結される円錐回転体411とからなる畦成形機において、円錐回転体411の分割片414の回転方向後端と隣接する分割片414の前端で形成される段差部Hは、円錐状面の頂部側である上面ローラ413側から円錐状面外端に向け段差寸法が徐々に増加するように形成する。
(もっと読む)
畦塗り機
【課題】トラクタにオフセット作業が行えるように装着された畦塗り作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方に装着され、側方にオフセットした位置で作業部51が前進畦塗り作業を行う畦塗り機50において、作業部51の位置及び方位を検出する位置方位センサ20と、走行機体2と作業部51との相対位置を制御する第一の自由度を構成する手段と、作業部51の姿勢を制御するための第二の自由度を構成する構成手段と、前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御する手段を備え、圃場隅部における走行機体2の姿勢変化に対応して、位置方位センサ20からの情報に基づき前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御し、作業部51が畦に沿って直進姿勢を保持し、圃場の隅部付近までの直進作業状態を維持させる。
(もっと読む)
苗植機の代掻ロータ伝動装置
【課題】 苗植装置のフロートの前側に設ける代掻ロータを、走行車体の後輪伝動ケース側の出力軸から伸縮連動軸を介して伸縮連駆動する形態にあっては、泥土、水等の飛散を受け易く、円滑な伝動駆動状態を維持し難い。
【解決手段】 走行車体の後車軸を軸装する後輪伝動ケースの出力軸7から、この代掻ロータ4のロータ伝動ケース8の入力軸9に連動するための、伸縮自在のスプライン軸10と、このスプライン軸10を嵌挿するスプライン筒軸11とからなるスプライン連動軸12を設け、このスプライン筒軸11のエアブリーザ孔13の外周面に適宜間隔ブーツ室14を形成して覆う連動軸ブーツ15を設ける。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
農作業機
【課題】トラクタからの外部電源が不要でトラクタから下りて手作業で配線接続をする必要がない農作業機を提供する。
【解決手段】農作業機1は、トラクタ2のPTO軸6側からの動力で作動する油圧ポンプ31と、この油圧ポンプ31からの作動油で作動する油圧モータ32と、作動油を制御する制御手段51とを備える。農作業機1は、トラクタ2のPTO軸6側からの動力で作動する発電手段41と、この発電手段41による電力で作動して制御手段51をコントロールするコントローラ52とを備える。
(もっと読む)
畦塗り機
【課題】土質に対応可能で、適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を盛り上げる回転可能な盛土体3と、盛土体3による盛土を締め固めて畦を形成する回転可能な畦形成体4とを備える。また、この畦塗り機1は、盛土体3が正方向に回転する正転状態と盛土体3が逆方向に正転状態時に比べて速い回転速度で回転する逆転状態とに選択的に切り換え可能となっている。
(もっと読む)
畦塗り機
【課題】所望硬さの畦上面を形成できる畦塗り機を提供する。
【解決手段】畦塗り機は、土を盛り上げる盛土体と、盛土を締め固めて畦側面を形成する畦側面形成体24と、盛土を締め固めて畦上面を形成する畦上面形成体25とを備える。畦上面形成体25は、この畦上面形成体25の回転方向aに並んで位置する複数の畦上面形成面部44を外周側に有する。各畦上面形成面部44は、畦側面形成体24側に向うに従って回転方向aとは逆方向に向う螺旋形状に形成する。また、各畦上面形成面部44は、土との接触時には畦上面形成体25の回転中心軸線X側へ移動する。
(もっと読む)
耕耘砕土作業機のレーキ装置
【課題】耕耘時の様々な条件に対応して、容易な操作によりレーキ体のすき込み性能を十分に発揮できる構成の耕耘砕土作業機のレーキ装置を提供する。
【解決手段】砕土ローター30とリヤカバー50との間にレーキ体4を配置して、レーキ体4は、リヤカバー50の回動中心と同軸上に回動中心が設けられ、それぞれ回動自在であるとともに、リヤカバー50に対し離反する方向に弾圧部材で付勢されている耕耘砕土作業機のレーキ装置。また、リヤカバー50に対し回動が固定された状態に切り換え可能に設けられているレーキ装置。さらに、リヤカバー50の上部に設けた調節レバー7で弾圧部材の付勢力は可変可能であり、レーキ体4の回動固定の切り替えも可能であるレーキ装置。さらにまた、レーキ体の回動軸51は、ローターカバー31外側に位置している耕耘砕土作業機のレーキ装置。
(もっと読む)
農作業機
【課題】トラクタからの回転動力を伝達する伝動部の途中に有する動力伝達部で回転差が生じているか否かを検出するトラクタに装着する農作業機を提供することを目的とする。
【解決手段】トラクタからの回転動力を入力し入力した回転動力を伝動部で伝動させて作業部で出力して農作業を行うトラクタに装着する農作業機において、伝動部に一定条件下での動力を伝達する動力伝達部10を介在し、動力伝達部10より入力側の伝動部の回転を検知する第1の検知部4と、動力伝達部10より出力側の伝動部の回転を検知する第2の検知部5と、2つの検知部4、5からの情報を取得し動力伝達部10で回転差が生じているか否かを検出する制御部2とを有することで上記課題を解決する。
(もっと読む)
田植機
【課題】駆動用アクチュエータにより整地装置を駆動する田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を取り付けた田植機において、整地装置に駆動用のアクチュエータを連動連設している。このように、整地装置に駆動用のアクチュエータを連動連設しているため、走行部の原動機部との間に伝動シャフトや伝動機構部を介設する必要性がなくなって、同走行部の最低地上高を良好に確保することができる。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
畦塗り機の整畦体用羽根板及びそれを使用した整畦体
【課題】畦の法面を整形する法面整畦部と、複数枚の羽根板を有し、畦の上面を整形する上面整畦部とを備える整畦体を装着した畦塗り機において、上面整畦部の羽根板によって畦上面から法面へかけての表面を連続的に、特に曲面に仕上げることを可能にする。
【解決手段】法面整畦部2と、本体となる支持部材31とその周面に接続される複数枚の羽根板32を有し、法面整畦部2の軸方向先端部に連結されて法面整畦部2と共に回転する上面整畦部3とを備え、畦塗り機10に装着される整畦体1において、
支持部材31に接続される接続部32aと、接続部32aに連続し、上面整畦部3の回転方向下流側に張り出す張出部32bとを有し、少なくとも張出部32bの法面整畦部2側の端部に、上面整畦部3の回転方向上流側から下流側へかけて上面整畦部3側から法面整畦部2側へ接近する形状をし、法面整畦部2に重なる移行部32dを形成する。
(もっと読む)
農作業機
【課題】圃場面に土塊がそのまま残ることを防止でき、圃場面の均平性の向上を図ることができる農作業機を提供する。
【解決手段】農作業機1は、耕耘作業をする耕耘体と、耕耘体の後方で整地作業をする整地体7とを備える。整地体7は、第1整地板11と、第2整地板12とを有する。第2整地板12は、左右方向長手状で水平姿勢となって整地作業をする整地本体板部21を有する。整地本体板部21には、整地本体板部21の下面より下方に突出する複数の突出部22を左右方向に沿って並設する。複数の突出部22のうち、少なくとも整地本体板部21の左右方向両端側に位置する突出部22aは平面視で前端側から後端側に向うに従って整地本体板部21の左右方向中央側に向うように、前後方向に対して傾斜している。
(もっと読む)
農作業機
【課題】相対的に互いに回動する2つの構成部を有する場合に、この回動をロックするロック機構がコンパクトとなるトラクタに装着する農作業機を提供することを目的とする。
【解決手段】一方の構成部50は、当て部材51を有し、他方の構成部20は、第1の受け部材61と、第2の受け部材62と、第1の受け部材61と第2の受け部材62の間に配設されたロック体42とを有し、ロック体42は、一方の構成部50の相対的な回動による当て部材51に対して通過可能位置と干渉位置とに変更可能であり、2つの構成部50、20の回動のロックは、当て部材51が、第1の受け部材61と干渉位置におけるロック体42の第1の受け部材61側端部42aとの間に挟まれる第1のロック状態と、第2の受け部材62と干渉位置におけるロック体42の第2の受け部材62側端部42bとの間に挟まれる第2のロック状態とでなされる。
(もっと読む)
農作業機
【課題】圃場面に段差ができるのを抑制でき、圃場面の均平性を向上できる農作業機を提供する。
【解決手段】農作業機11は、耕耘作業をする耕耘体と、耕耘体の後方で整地作業をする第1整地体41および第2整地体46とを備える。第2整地体46の左右方向端部には、展開作業状態および折畳非作業状態に切換可能な延長整地体61を軸部57を介して回動可能に設ける。第2整地体46の左右方向端部と展開作業状態の延長整地体61の内端部との間には、圃場の泥水が流れる泥水用流路72がある。
(もっと読む)
畦塗り機
【課題】畦塗り用の土を各耕耘爪から後方の畦塗り体に向けてスムーズに送り出すことができ、よって、効率良く適切な畦塗り作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、トラクタTの走行にて畦に沿って移動しながら、ロータリー出力軸91の外周面からこのロータリー出力軸91の軸方向に所定間隔をおいた状態で突出した複数列の耕耘爪96で畦塗り用の土を耕耘して跳ね上げこの跳ね上げられた土を畦塗り体105で旧畦に塗り付ける。複数列の耕耘爪96は、それぞれ先端屈曲側が後方の畦塗り体105を向くように取り付けた。
(もっと読む)
181 - 200 / 477
[ Back to top ]