
Fターム[2C150DA28]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 足 (127)
Fターム[2C150DA28]に分類される特許
61 - 80 / 127
ロボット制御システム
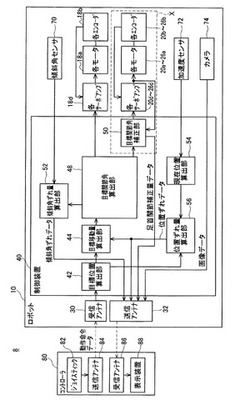
【課題】オペレータの意図通りに移動ロボットを操縦することが容易となるロボット制御システムを提供する。
【解決手段】オペレータがコントローラを操作することによって移動ロボットを操縦するロボット制御システムであって、コントローラは、移動ロボットに動作命令を入力する手段と、オペレータに移動ロボットの制御状態を表示する表示手段を有しており、移動ロボットは、本体と、本体を移動させる手段と、移動ロボットの姿勢状態を検出する手段と、コントローラから入力された動作命令に基づいて移動ロボットの姿勢状態の目標値を決定する手段と、移動ロボットの姿勢状態が決定された目標値が示す状態となるように移動手段を制御する手段と、検出手段が検出した姿勢状態と目標値との差分値を算出する手段とを有しており、表示手段は移動ロボットが算出した差分値に基づいた指標を表示する。
(もっと読む)
歩行玩具及び歩行玩具の歩行方向変更方法

【課題】内部構造を簡略化することで更に小型化し、電磁石と永久磁石を用いて歩行を可能とする歩行玩具を提供する。
【解決手段】第一可動部と第二可動部からなる歩行玩具であって、前記第一可動部及び前記第二可動部は、支持軸により回動自在に結合され、前記第一可動部は、電池を内蔵し、且つ、永久磁石を備える共に、電磁石を通電させるスイッチを底面板に備え、前記第二可動部は、前記スイッチにより作動する電磁石を備え、前記第二可動部の下端を接地部とする後足とし、前記第一可動部の底部の前端を第二可動部の下端より前方に突出させて接地部としての前足とした。
(もっと読む)
脚式ロボット
【課題】歩行時にピッチ軸股関節のモータが出力すべきトルクを低減する脚式ロボットを提供する。
【解決手段】脚式ロボット100は、体幹リンク10と、脚部30、50を有する。夫々の脚部は、体側方向に伸びる回転軸C1を有しており、モータを内蔵する股関節32、52によって、体幹リンク10に連結されている。体幹リンク10と夫々の脚部の間にはバネ20が介挿されている。バネ20は、自然長となるときの体幹リンクと脚部の相対角が、歩行時に脚部が体幹リンクに対して最も前方に揺動したときの相対角と、歩行時に脚部が体幹リンクに対して最も後方に揺動したときの相対角の間に存在するように配置されている。バネの伸縮による弾性力は、歩行時の脚部の振り出し始めの加速時と振り出し終わりの減速時の双方で股関節32、52のモータをアシストするように作用する。歩行時にピッチ軸股関節のモータが出力すべきトルクを効果的に低減できる。
(もっと読む)
人形の股関節構造及び該股関節構造を備えた人形
【課題】 人体の股関節に近い可動範囲を有し、かつ、座った姿勢において股が開かず美しいポーズをとらせることができる人形を得る。
【解決手段】 中空状の胴部材と中空状の脚部材とを両部材の中空部内に通された弾性体によって連結してなる人形の股関節構造において、胴部材の股間部を挟んで両側に股関節凹部を形成し、両股関節凹部を繋ぎ、脚部材には股関節凹部に嵌る形状の股関節凸部を形成し、股関節凹部に股関節凸部を嵌めた状態において胴部材の中空部と各脚部材の中空部とを連通させると共に両脚部材の中空部を連通し、胴部材の中空部内から各脚部材の中空部内へ通された一対の弾性体によって各脚部材をそれぞれ胴部材側へ牽引すると共に、胴部材の股間部を跨いで両脚部材の中空部内へ通された補助弾性体によって各脚部材をそれぞれ対向する脚部材側へ牽引する。
(もっと読む)
人形の股関節構造及び該股関節構造を備えた人形
【課題】 胴部材の股間部を鼠径部に沿った略V字状に形成して脚部材を連結させる構造であるにもかかわらず、股関節を屈曲させても股が開かない人形の股関節構造を得る
【解決手段】 脚部材を胴部材に対して回転可能に連結してなる人形の股関節構造において、胴部材に股間部が鼠径部に沿った形状となるように該股間部を挟んで両側に股関節凹部を形成し、脚部材に股関節凹部に嵌る形状の股関節凸部を形成し、両股関節凹部を胴部材に対する脚部材の回転軸からずれて伸びるように形成された連結孔によって繋ぎ、両脚部材の股関節凸部を股関節凹部に嵌めた状態において連結孔を通して架け渡される連結弾性体によって互いに牽引し、胴部材に対して脚部材を屈曲させることによって連結弾性体を連結孔に沿って回転軸の前側上方に誘導させるように構成する。
(もっと読む)
水遊び玩具
【課題】
数を覚えながら遊ぶことのできる新しい演出の水遊び玩具を提供する。
【解決手段】
複数の装飾体8を連結管21により取り付けた筒状の本体部1と、本体部1を垂直に載置固定する台座部3と、止水解除部5とを有し、本体部1内には、本体部1内を上下移動する人形7が収容され、装飾体8は、中空状にして上部に開口を有すると共に内部に人形7を収容し、台座部3は、本体部1を支承する内部が空洞の本体支承部31と、本体部1に注がれた水を止水可能とする止水制御部4とからなり、止水解除部5は、止水制御部4の内部に配置する止水開放突起部51と、止水開放突起部51の後端に連結され本体部1の外側側壁に沿って上方に延びる垂直可動部53と、垂直可動部53の上端に係脱可能に取り付けられて本体部1内を上移動した人形7が当接すると垂直可動部53との係合が外れる係止部56とから構成される水遊び玩具とする。
(もっと読む)
乳幼児おもちゃ
【課題】比較的長期間に亘って子供の興味を惹くことのできる乳幼児おもちゃを提供する。
【解決手段】乳幼児おもちゃ11は、複数の球状部材12と、複数の棒状部材13と、ジョイント部材14とを備え、各構成部品には、凸部15aと凸部15aを受け入れる凹部15bとによって球状部材12と棒状部材13、球状部材12とジョイント部材14、棒状部材13と棒状部材13、または棒状部材13とジョイント部材14とを着脱自在に連結する連結部15が設けられている。
(もっと読む)
可動人形の下半身部
【課題】従来の可動人形の下半身部は、可動範囲を再現するのみで関節の可動による形状の再現がほとんどなされてなかった。
【解決手段】可動範囲を人体と同様にするために関節の基本構造を人体と同様にし、腰部、大腿部、膝下部などを一体的パーツを関節で繋ぐ方法ではなく、腰部、大腿部、膝下部などを関節の動きに合わせて形状変化するように最適の形状で複数パーツに分割する事によって関節可動による形状変化を再現する。
(もっと読む)
縫いぐるみ
【課題】手触りの良い柔軟性のある縫いぐるみであって、使用者が、引紐を把持して歩行すると、縫いぐるみが、恰も歩行しているかのような動作を行わせる趣向の高い縫いぐるみを提供する。
【解決手段】4つ脚を有する動物を模した形に形成され、その内部に中綿を詰めた柔軟性を有する縫いぐるみであって、縫いぐるみは、頭部24と、胴体部22と、左右の前脚部12と、左右の後脚部16とを有し、胴体部の内部に背骨部材32を有し、背骨部材の前端に前脚部材取付部40を備え、背骨部材の後端に後脚部材取付部46を備え、前脚部先端に設けた前脚先端部材52と前脚部材取付部とを接続する前脚部材34として弦巻バネを内蔵し、後脚部先端に備えた後脚先端部材58と後脚部材取付部とを接続する後脚部材36を内蔵し、首部分に引紐30を備えた。
(もっと読む)
動作玩具
【課題】小さな容量のモータによって揺動体を揺動させることができる動作玩具を提供すること。
【解決手段】モータが設置されたベースと、前記ベースに付設された形象物主体と、水平に延在する軸を中心として揺動可能に構成された揺動体と、前記モータで発生した動力を前記揺動体へ伝達する動力伝達機構とを備え、前記動力伝達機構を通じて前記揺動体に加えられる力によって当該揺動体が揺動することによって形象物主体が動作するように構成された動作玩具において、前記揺動体には、起動トルクを軽減させるためのウエイトが設けられていることを特徴とする。
(もっと読む)
脚式ロボット
【課題】体幹に加わる重力によって、体幹に加わる重力によって、片脚立脚時の立脚のロール関節に作用するモーメントを増大させることなく、体幹の位置を低く抑えながら大きな歩幅を確保できる脚式ロボットを実現する。
【解決手段】脚式ロボット100は、一対の脚部20が体側面12で体幹10とピッチ軸(Y軸)周りに回転可能に連結されている。これによって、体幹10の位置を低く抑えながら脚部の高さH1を高くすることができる。体幹10の位置を低く抑えながら大きな歩幅を確保することができる。脚部20構造は、ロール関節38、42が、体下面14の下方に位置する構造となっている。これによって、それらの関節の回転軸C1と体幹重心Gとのピッチ軸方向の距離L1が増大することを抑制する。片脚立脚時の立脚のロール関節に作用するモーメントを増大させない。
(もっと読む)
2足移動体の歩行ステップをテンキーによって制御する装置
【課題】 2足移動体のステップをテンキー入力し、それに対応したステップ結果を確認できる装置を提供する。
【解決手段】 構成要素はコンピュータのハードウェアとソフトウェアである。ソフトウェアは、テンキー入力順とステップを対応させるデータとテンキー入力受付機能、ステップ判定機能、ステップ結果出力機能のプログラムで構成する。2足移動体のステップにテンキーを順に押すことを割り当て、テンキー位置によって足の左右(回転時は両足)、歩幅、踏み出し方向、足の向き(回転時)を判定する。ステップ結果を足跡や床面パターン移動、または2足移動体を模した画像や視界変化の出力で行う。
(もっと読む)
模型体駆動装置、駆動体および模型体
【課題】駆動体と仕切板により隔てられた模型体の脚部の蹴り上げや振り上げを実現した模型体駆動装置、駆動体および模型体を供する。
【解決手段】仕切板5上で複数の脚部により本体を支える模型体20が、仕切板5を隔てた下方に配設された駆動体160の駆動に従動して動作する模型体駆動装置150において、模型体20は、複数の脚部が各々前後に揺動可能で、複数の脚部の各足端部にそれぞれ磁石Mfl,Mfr,Mrl,Mrrが一方の磁極を足裏に向けて設けられ、駆動体160は、互いに異極を上方に向けた1対の磁石を仕切板5の下面に沿って前後に近接して配列した複数組の磁石対mfl,mfr,mrl,mrrが上方の模型体の複数の脚部の各足端部にそれぞれ対応して走行方向に往復動自在に設けられ、往復駆動機構180により複数組の磁石対mfl,mfr,mrl,mrrを同時に前後に往復動させることで、模型体20の複数の脚部の各足端部の永久磁石Mfl,Mfr,Mrl,Mrrに磁力を働かせて複数の脚部をそれぞれ揺動させる模型体駆動装置、駆動体および模型体。
(もっと読む)
模型体駆動装置、駆動体および模型体
【課題】駆動体と仕切板により隔てられた模型体の脚部の蹴り上げや振り上げを実現した模型体駆動装置、駆動体および模型体を供する。
【解決手段】模型体20が、仕切板5を隔てた下方に配設された駆動体100の駆動に従動して動作する模型体駆動装置2において、模型体20は、複数の脚部が各々前後に揺動可能で、複数の脚部の各足端部にそれぞれ磁石Mfl,Mfr,Mrl,Mrrが一方の磁極を足裏に向けて設けられ、駆動体100は、磁極を上下方向に向けた電磁石を前記走行板の下面に沿って走行方向に複数近接して配列した複数組の電磁石群Efl,Efr,Erl,Errが上方の模型体の複数の脚部の各足端部にそれぞれ対応して設けられ、制御手段により複数組の電磁石群Efl,Efr,Erl,Errに配列された電磁石のそれぞれを励磁制御して模型体の複数の脚部の各足端部の永久磁石Mfl,Mfr,Mrl,Mrrに磁力を働かせて複数の脚部をそれぞれ揺動させる模型体駆動装置、駆動体および模型体。
(もっと読む)
自律移動ロボットおよび自律移動ロボットによる物品運搬方法
【課題】自立移動ロボットが物品を取得元から主体的に受け取り、制振制御により揺れを押さえて運び、届け先に確実に届けることを可能とする。
【解決手段】物品の運搬には所定の仕様の運搬容器(M)を用いる。運搬容器には、画像識別のためのパタン(M2)および把持に適した形状の把持部分(M3)を備える。ロボット(R)は、取得元の画像から、運搬すべき物品を載せた所定仕様の運搬容器の把持に適した所定位置を認識する把持位置認識手段261と、把持部を運搬容器の所定位置に駆動し、所定位置を把持する制御を行う把持制御手段262と、把持部に作用する外力に基づいて把持に成功したか否かを判断する把持成否判定手段245とを備える。さらに、運搬中に、把持部に作用する外力を打ち消す帰還制御を行うことにより把持部の振動を押さえる制振制御手段410を備える。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】対象物のロボットに対する移動方向によらずに、移動計画の修正を要する状況を必要最小限に留め、可能な限り、移動計画に則した対象物の移動を可能とするロボットの目標歩容を生成する。
【解決手段】対象物120の移動計画に基づいて対象物120の将来の第1仮目標運動軌道を決定し、対象物・ロボット間位置姿勢関係に関する要求が少なくとも将来の2以上の所定数目で満たされ、且つ、ロボット1の脚体運動に関する制約条件が所定数の歩数目まで各歩数毎に満たされるということを必要要件とし、その必要要件を満足するロボット1の脚体の運動が可能であるか否かを判断する。その判断結果が肯定的であるときは、第1仮目標運動軌道を基に目標歩容を生成し、否定的であるときは、修正した移動計画に基づく対象物120の目標運動軌道を基に目標歩容を生成する。
(もっと読む)
脚式歩行ロボットの足部構造
【課題】歩行動作時において足部の裏面と接地面との良好な接地状態を維持することにより、単脚支持状態における十分な安定性を確保し、もってこの種の脚式ロボットの歩行動作をよりスムースに行えるようにすることにある。
【解決手段】足部の裏面に接地面を掴持可能な可動体を設けて、歩行動作時において足部の裏面が接地面に接地した際に、可動体により接地面を掴持して、足部の裏面と接地面との良好な接地状態を維持するように構成した。
(もっと読む)
人形玩具
【課題】関節の動きの自由度が大きく、人形に様々な姿勢をとらせることができ、且つ安定感に優れた人形玩具を提供する。
【解決手段】頭部2と、胴部3と、胴下部4と、腕部5と、脚部6とから構成される人形玩具1であって、胴部3は、頭部2、胴下部4、腕部5を連結させるための球体連結部13を有し、胴下部4は、球体連結部13を嵌め合わせるための球状凹部及び脚部6を連結させるための球体連結部14を有し、腕部5は、肩部51、上腕部52、下腕部53及び手部54で構成され、肩部51は胴部3の球体連結部13に連結され、上腕部52は肩部51に挿着され、上腕部52と下腕部53、下腕部53と手部54は球体連結部材11で連結され、脚部6は、上脚部61、下脚部62及び足部63で構成され、上脚部61は胴下部4の球体連結部14に連結され、上脚部61と下脚部62、下脚部62と足部63は球体連結部材12で連結された人形玩具とする。
(もっと読む)
コニュニケーションシステム
【課題】ペット型ロボットの動作を、単調で物足りなくならないような、しかも連帯感の持てる感情のこもった、動作とすることにより、良好なコミュニケーションが取れるコミュニケーションシステムを提供する。
【解決手段】一方のコミュニケーション装置で行われた操作者の動作を、他方のコミュニケーション装置に伝達するコミュニケーションシステムにおいて、一方のコミュニケーション装置1は、操作者の動作を検出する動作検出手段4と、動作検出手段4で検出された操作者の動作に応じて感情信号を生成し保持する感情生成手段5と、感情信号を他方のコミュニケーション装置3に送信する送信手段6と、他方のコミュニケーション装置3から送信された感情信号を受信する受信手段7と、感情信号を表示部に出力する情報出力手段8と、を備える。
(もっと読む)
脚車輪型移動ロボットとその階段歩行方法
【課題】 歩行中の足底のすべり、歩幅の誤差、階段そのものの幾何学的な誤差の影響を受けずに、一定の歩幅を維持して、多数の階段を安定に歩行することができる脚車輪型移動ロボットとその階段歩行方法を提供する。
【解決手段】 伸縮又は折曲げ可能な複数の支持脚14、16を立脚および遊脚として交互に振り出して歩行し、かつ支持脚の下端に設けられた足首・車輪駆動部18の車輪21で平坦地を走行する脚車輪型移動ロボット10の階段歩行方法。階段を上下する一歩毎又は数歩毎に、次の歩行に適した所定の位置まで、足首・車輪駆動部18で並進移動する補正期を有する。
(もっと読む)
61 - 80 / 127
[ Back to top ]