
Fターム[2C150DA28]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 足 (127)
Fターム[2C150DA28]に分類される特許
21 - 40 / 127
三足歩行ロボット
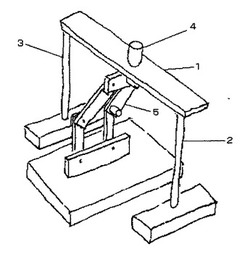
【課題】 歩行ロボットには多数の関節があり、その関節を駆動するアクチュエータ、制御回路、制御ソフトウェアの製作・整備に多大な負担がかかり、しかし歩行ロボットの運用場面においては不要な機能も存在し、これが無用な重量増加も生み出し、歩行ロボットの運用を困難なものにしていた。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
(もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット

【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
三足歩行ロボット
【課題】従来の歩行ロボットは、姿勢制御を行うためのソフトウェアが複雑であり、またその問題を解決する目的で三本以上の脚部を搭載する歩行ロボットを用いる場合にはアクチュエータの数が増え、結果としてその多数のアクチュエータを制御する制御回路も複雑なものとなり、この部分の製作や整備に多大な労力が必要であった。
【解決手段】中央の脚部、または左右の脚部を用いて重心の左右の変化を抑えて歩行を行うようにする。さらに左右の脚部を連動させる事により脚部一本分のアクチュエータで二本の脚部を動作させる事で、一度に制御する必要のあるアクチュエータの数を二足歩行ロボットと同程度に減らす。
(もっと読む)
脚式ロボット
【課題】起伏や段差のある路面を安定に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、4個以上の距離センサ群、路面センサ、及び、コントローラを備える。記憶装置は、足リンクの目標軌道を記憶している。距離センサ群は、足裏の4箇所以上の異なる位置に配置されている。各距離センサは、夫々の配置位置における足裏と路面との間の距離を計測する。路面センサは、路面の起伏や段差の形状を計測する。コントローラは次の処理を実行する。まずコントローラは、足リンクの目標軌道と路面センサの計測値によって定まる遊脚の足裏の接地予定領域を求める。次にコントローラは、求めた接地予定領域内に配置されている距離センサ群の中から3個の距離センサを選択する。そしてコントローラは、選択された3個の距離センサの計測値が等しくなるように足リンクの姿勢を制御する。
(もっと読む)
畳んで引き込み可能な翼を持った玩具
畳んで引き込み可能な翼を有する玩具であって、胴体と、翼とを有し、該翼は、スナップ留めのピボット関節を介して該胴体に連結されており、該ピボット関節は、空間を最小化する重なり合う構成にて該翼を畳むことを可能にするものである。種々のバネ、ラッチ、トリガーおよび停止機構が、畳まれた翼がバネ負荷を受けた様式にて、最小限の使用者の労力で展開することを保証する。機械的な高い応力負荷に曝された場合に、ピボット関節は非破壊的な様式で翼を解放することができ、従って破壊的な翼の破損を防ぐことができる。 (もっと読む)
仮想ペット育成装置、仮想ペット育成方法、仮想ペット育成プログラム及び携帯端末装置
【課題】利用者の行動に応じて仮想ペットを生育させ、利用者の健康増進を図る。
【解決手段】仮想的に生成させた仮想ペットを育成させる仮想ペット育成装置であって、仮想ペットを生成し、利用者の行動情報に基づいて育成処理部(育成制御部36)で育成するとともに、利用者の地図上の行動範囲を特定し、仮想ペットの支配領域を設定して、表示部(52)に表示する。行動情報は、利用者の行動から得られた少なくとも距離情報、移動情報又は速度情報の何れかであり、情報蓄積部(位置情報履歴蓄積部32)に蓄積する。
(もっと読む)
フィギュアシリーズ、フィギュア型枠の製作方法、およびフィギュアシリーズの展示方法
【課題】豊富な色彩を有し、羽二重餅のごとき柔らかな触感が付与されたフィギュアシリーズのフィギュアを手に触って遊び、楽しめるフィギュアシリーズ、フィギュア型枠の製作方法、およびフィギュアシリーズの展示方法を提供する。
【解決手段】或るカテゴリーに属するアイテムを複数のフィギュアで形成するフィギュアシリーズであって、各フィギュアは、各フィギュアに共通する基本形状に形成されるベース材と、このベース材に設けられ個性を特徴づけるように記号化して付加される特徴的要素とを有する一方で、各フィギュアを、複数の色相要素と複数の明度要素で成る色彩マトリクスに対応づけられる色彩を有する軟質性の合成樹脂材で成形した。また、フィギュア型枠は、ベース材に特徴的要素を付加してフィギュア原型を形成した後、このフィギュア原型の周囲に柔軟性を有する合成樹脂材を注入して固化させてからフィギュア原型を取り出して作成する。
(もっと読む)
ぬいぐるみ玩具
【課題】製造コストの低減が図れるとともに、抱き心地がよく心が癒される新しい発想のぬいぐるみ玩具を提供すること。
【解決手段】ぬいぐるみ玩具Aの胴体部2には可撓性を有するワイヤー状部材5を曲折し、曲折した該ワイヤー状部材5の両端部5a、5bを頭部側3に、曲折部5cを後脚側に位置するように配置するとともに、上記ワイヤー部材5の適宜の場所を上記胴体部2に固定し、上記ワイヤー状部材5の両端部5a、5bをそれぞれ回動軸6a、6bに固定し、該回動軸6a、6bは所定間隔をおいて並設し、ぬいぐるみ玩具Aの頭部3には、モータ10を駆動力として上記回動軸6a、6bを同一方向に回動させ上記ワイヤー状部材5を捩じる駆動装置Bを配置した。
(もっと読む)
人形玩具の可動連結部材及び人形玩具
【目的】人形玩具に様々な動作や姿勢をさせる際に関節部に無理な力や負荷がかかった場合であっても関節部の脱落が著しく抑制する。
【構成】人形玩具の肘・膝の如き関節部に配設されることで腕や脚の如き各構造体同士を動作可能に連結する可動連結部材において、
腕・脚の如き構造体の内の一方に接続すると共に関節の回動用軸受孔を有する第一連結部材と、他方の構造体に接続すると共に前記第1連結部材を回動可能に軸支する回動軸を有する第2連結部材とを有して成り、
前記第2連結部材が第2−1連結部材及び第2−2連結部材の2つの部材から成り、
該第2−1連結部材と第2−2連結部材の2つの部材が、前記第1連結部材の両側から該第1連結部材を挟み込んだ状態で軸支する構成であると共に、該第2−1連結部材及び第2−2連結部材の各々に他方の構造体に接続する接続部が設けられた構成であること、
を特徴とする。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成し、屈曲部112は、足平部100の前後方向に所定の幅を有する溝114からなり、溝114は、足平部100の前後方向の幅が爪先部102の後端から前端に向かって爪先部102の中間まで延びて形成されている。
(もっと読む)
格闘玩具
【課題】ゲームを実行する場所が限定されることがなく、玩具を3次元的に動かしてダイナミックな格闘ゲームを展開することができる、新しい発想の格闘玩具を提供すること。
【解決手段】格闘人形体Aの胴体部1には頭部2、両腕部3及び付け根に歯車37を設けた両脚部4を回動可能に取り付け、格闘人形体Aを駆動する駆動装置Bには上記格闘人形体Aを連結する連結部Cを設け、該連結部Cには駆動回転体11と係合軸14とを配置し、駆動装置Bの後面には上記駆動回転体11を回転させる操作杆15を配置するとともに上記操作杆15の操作に連動して上記連結部Cを回転させるか否かを選択する選択部材16を設け、格闘人形体Aと駆動装置Bとを連結したときには上記駆動回転体11は上記脚部4の従動回転体37に連係し、操作杆15の操作で脚部4が回動するようにした。
(もっと読む)
連結部の被覆材
【課題】連結部に巻き込まれることを被覆材により防止しつつ、第一部材と第二部材とが屈曲した際にその被覆材そのものに挟まれることを防止できる連結部の被覆材を提供する。
【解決手段】可撓性を有し、撓み変形可能となるように第一部材14の所定位置に取り付けられる第一端部61と、可撓性を有し、撓み変形可能となるように第一部材14の所定位置から離間して位置する第二部材16の所定位置に取り付けられる第二端部62と、可撓性を有し、第一端部61と第二端部62とに一体的に結合され、連結部を被覆し且つ連結部から離隔可能に設けられる中間部63とを備える。中間部63の曲げ剛性は、全体に亘って、第一端部61の曲げ剛性より大きく設定されている。さらに、第一部材14と第二部材16とが屈曲する場合に、中間部63が連結部から遠ざかるように凸状に変形する。
(もっと読む)
歩行玩具駆動モジュール
【課題】簡単な機構で歩行玩具の前進、左折進行、右折進行を任意に行わせることのできる歩行モジュール。
【解決手段】磁石6とコイル7を利用して上下動する一対のリンクレバー8の先端部に回動アーム9をリンクさせ、リンクレバーの上下動に伴って、回動アームの接地部が床面に接触して回動する動作方向に抗して、筐体1が回動アームの動作方向と反対方向に押し出される。リンクレバーの下端側面に突出するジョイントピン10は、回動アームのガイド溝に嵌合され、回動アームの側面に突出する固定ピンが筐体の内側側面に嵌合し、リンクレバーの上下動に伴って、回動アームの接地部が略円形の軌跡を生じるように構成し、リンクレバーの上下動に伴って付属アームをリンクさせ、且つ、上下動する一対のリンクレバーを交互に動作させて筐体を前進歩行させ、または何れか一方のリンクレバーのみを動作させて右回り又は左回りのいずれかの歩行動作を行う。
(もっと読む)
ロボット玩具
【課題】簡易な構造により小型化を可能にする。
【解決手段】制御基板251は主面が玩具本体2の正面を向くように玩具本体2の内部に起立して設置され、玩具本体2の内部空間27は制御基板251の主面側で上部空間273、中部空間274及び下部空間275に仕切られ、このうち下部空間275にはコイル244を有する左右の脚部24,24が設けられ、上部空間273及び中部空間274には赤外線受信部211及び電池221が設置される。
(もっと読む)
ハンドパペットマニピュレーションシステム
【課題】従来ハンドパペットを人の手で操っていた方法を自動化制御システムで代替するハンドパペットマニピュレーションシステムを提供する。
【解決手段】ハンドパペットマニピュレーションシステム100は、制御モジュール110とパペット操作装置120とを備える。パペット操作装置120は、ベース122と、ベース122上に設けられ、第1のハンドパペットの胴体と接続され、制御信号を基にベースに対して胴体を制御する身体制御機構121と、身体制御機構121に配置され、第1のハンドパペットの頭部に接続され、制御信号を基に胴体に対して頭部を曲げ、ベースと結ぶ線が胴体の延伸方向である頭部制御機構123と、身体制御機構121に設けられ、頭部制御機構123の両側にそれぞれ配置され、第1のハンドパペットの手部にそれぞれ接続され、制御信号を基に手部を制御し、胴体に対して回転させる1対の手部制御機構とを含む。
(もっと読む)
着脱自在式ハンガー
【課題】 バッグ等にアクセサリーとして付けて所持するなど、携帯に適した美観を有し、また、操作性に優れ、コンパクトでありながらも引っ掛ける対象の多様な厚みに対応もできる着脱自在式ハンガーを提供すること。
【解決手段】 建造固定物の縁辺に掛けて設置し、それに携帯可能な物品を掛けて使用する着脱自在なハンガーにおいて、ハンガーの略全体を、動物の身体を模した形状とし、建造固定物縁辺に掛ける設置部と、携帯可能物品を掛けられる被係留部と、その設置部と被係留部との間の胴部とを備え、設置部と被係留部の少なくとも一方を、動物において耐荷重な身体部位を模した形状とする。
(もっと読む)
ビートトラッキング装置、ビートトラッキング方法、記録媒体、ビートトラッキング用プログラム、及びロボット
【課題】雑音に対するロバスト性を確保するとともに、テンポ変動への追従性及びテンポ推定の安定性を確保する。
【解決手段】音楽音響信号MAから自己音声信号SVの音声成分をエコーキャンセルした音響信号にフィルタ処理を行い、オンセットを強調したオンセットベクトルを出力するSobelフィルタ部21と、オンセットベクトルに正規化相互相関関数を用いた時間周波数パターンマッチングを行ってビート間隔信頼度を求める時間周波数パターンマッチング部22と、ビート間隔信頼度に基づいてビート間隔を推定してテンポTPを出力するビート間隔推定部23とを備えた。
(もっと読む)
ロボット玩具
【課題】より単純な構造でより自然な歩行動作を実現する。
【解決手段】胴体部1と、左右の足部を交互に前側に繰り出すように運足する一対の脚部2L、2Rと、駆動源11の駆動力を一対の脚部の各々に伝達する動力伝達機構3とを備えるロボット玩具100であって、一対の脚部は、胴体部に対して前後方向の軸を中心に揺動自在に設けられ、動力伝達機構は、駆動源の駆動に基づいて第1継手部材及び第2継手部材が一体となって回動する自在継手を備え、自在継手の回動によって、歩行面に接地した状態で前後方向に並んだ左右の足部20、20のうち、歩行面から離地する後側の一方の足部を他方の足部に対して外側に配置させ、且つ、他方の足部を追い越して接地する一方の足部を他方の足部と前後方向に並ばせるように一対の脚部を運足動作に同期させて揺動させる。
(もっと読む)
駆動装置及びこれを有するロボット
【課題】駆動ユニットの回転力を従動ユニットに伝達するケーブルに充分な張力を発生させることで、駆動ユニット及び従動ユニットとケーブルとの間に発生するスリップを防止し、回転力を損失なしに伝達する駆動装置及びこれを有するロボットを提供する。
【解決手段】駆動ユニット30と、前記駆動ユニット30と接触しないように離隔空間を挟んで設けられ、前記駆動ユニット30から発生した回転力を受けて回転する従動ユニット40と、前記駆動ユニット30と前記従動ユニット40とを連結し、前記回転力を前記従動ユニット40に伝達するケーブル50と、前記離隔空間に設けられ、前記ケーブル50に張力が発生するように前記ケーブル50が互いに接近する方向に前記ケーブル50を加圧する加圧ユニット60とを含んで駆動装置を構成する。
(もっと読む)
人型機械
【課題】
マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように人の情動を呼び起こす魅力的で美しい下肢の動作制御を行うこと。
【解決手段】
関節が駆動する身体を持つマネキンやロボットなどの人型機械で、腰と脚が連動してファッションモデルのようなポーズをとるための美しい動きの表現方法と機構。
左右脚交差動作と左右股関節の前後揺動動作の同期による連動や、脚の旋回動作と股関節の上下
揺動の同期による連動により、下肢の美しい表現を可能にした。
(もっと読む)
21 - 40 / 127
[ Back to top ]