
Fターム[2C150DA28]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 足 (127)
Fターム[2C150DA28]に分類される特許
101 - 120 / 127
自律移動ロボット

【課題】後方側に障害物等があっても確実に検出することができる自律移動ロボットを提供する。
【解決手段】ロボット1の頭部4に、前進移動方向側にある物体(障害物や移動体)を検出する2個のCCDカメラ7a,7bを設け、胴体部2の背面に取付けた格納部8の下側に、後進移動方向側にある物体(障害物や移動体)を検出する5個の超音波センサ9a〜9eを所定間隔で配置した。
(もっと読む)
走行模型体

【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車(101)と、台車車(101)に固定された固定部材(42、43および30)と、固定部材(42、43および30)に揺動可能に取り付けられた胴体部(201)と、固定部材(42、43および30)に揺動可能に取り付けられると共に胴体部(201)と連係された首部(204)と、固定部材(42、43および30)に第1連結部材(80)を用いて揺動可能に連結されると共に首部(204)に揺動可能に取り付けられた頭部(205)とを有する。
(もっと読む)
走行模型体
【課題】 よりリアルで滑らかな動きを再現することが可能な走行模型体を提供する。
【解決手段】 走行模型体1は、所定の走行面を走行する台車101と、台車101に固定された固定部材(42、43および30)と、固定部材に揺動可能に取り付けられた胴体部201と、胴体部201に揺動可能に取り付けられた脚部202R/Lおよび203R/Lと、胴体部201に中心を外して回転可能に保持された偏心カム(54fR、54rR、54fL、54rL)と、偏心カムの回転を第1リンクを介してそれぞれ脚部へ伝達する第1伝達部(55fR、55rR、55fL、55rL)と、偏心カムの回転を第1リンクと異なる第2リンク(56fR、56rR、56fL、56rLと、59fR、59rR、59fL、59rLの組み合わせ)を介して脚部へ伝達する第2伝達部とを有する。
(もっと読む)
無線操縦式二輪車玩具
前輪支持体を操舵角自在となるよう様に車体に装着され、人形部を車体上部に揺動可能に取り付け、この人形部を無線操縦により進行方向に対して垂直且つ車体に対して水平方向に平行移動させて、前記人形の並行移動による重心の移動で前輪支持体を傾倒させて操舵し、この人形の移動制御部と二輪車の走行制御が無線操縦による無線操縦式二輪車玩具において、人形の移動制御部は二輪車中央に搭載されて、人形を駆動する駆動部が人形胴体部に刻設された穴部に遊嵌する無線操縦式二輪車玩具を提供する。 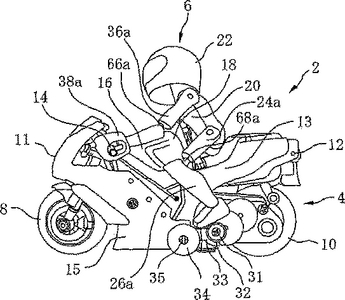 (もっと読む)
(もっと読む)
綱渡り玩具
【課題】猿などの動物、人形が蔦などの綱にぶら下りながら綱を手繰るようにして渡る動作を呈し、興趣が深い綱渡り玩具を提供する
【解決手段】玩具体1は、前後方向に回動可能な左右腕体26,27及び左右脚体32,33と、左右腕体26,27及び左右脚体32,33を左右交互に前後方向に回動する作動機構及び作動機構を駆動させる駆動機構とを有している。左右腕体26,27及び左右脚体32,33の係合部が棒状体45に係合して玩具体1がぶら下がった状態で作動機構が左右腕体26,27及び左右脚体32,33を前後方向に反復回動作動させ、玩具体1が棒状体45に沿って移動し、綱渡りの動作を呈する。
(もっと読む)
模型体およびその発射装置
【課題】
走行体の走行スタイルのバリエーションを豊富にし、また、走行以外の移動も可能とする走行玩具を提供する。
【解決手段】
発射装置の押し出し部からの力を受ける受け部6と、移動手段が着脱可能な移動手段装着部と、走行面に接触する接触部4とを有し、接触部4は、走行体に対して上下方向に移動する移動機構を有することを特徴とする走行体と、 弾性部材の反発力によって押し出し部を突出させる第1の発射手段と、前記発射装置に摺動自在に設けられた摺動部材と、該摺動部材に回動自在に設けられたプレート部材とを有する第2の発射手段とを有することを特徴とする発射装置とを備える。
(もっと読む)
人形の骨格構造及び該人形
【課題】 人形の腕部位或いは脚部位を関節位置で深く屈曲させても屈曲姿勢を維持することができる人形の骨格構造を提供する。
【解決手段】 人体の腕又は脚を構成する両端部に関節を有する骨格を模した人形の骨格構造において、前記人形の骨格中間部に該骨格を屈曲させて分割する前記人体の腕及び脚には無い中間関節部を設け、当該中間関節部を骨格の分割面に形成された相対して当接する関節面部と当該両関節面部を接触・離反させる枢軸部と当該両関節面部の離反を所定角度で停止させる当該枢軸部に回動可能に軸着された係止部とからなる構成とした人形の骨格構造。
(もっと読む)
走行玩具
【課題】モータ動力でもって左右の脚を前後に揺動動作させて走行し、切替によって直進や旋回が可能な走行玩具を提供すること。
【解決手段】後側左右に第1の脚が設けられ、第1のモータは別個の遊星歯車機構を介して左右の第1の脚に連結され、遊星歯車機構の各々は太陽歯車、遊星歯車、遊星キャリア及び内歯歯車から構成され、第1のモータの動力による遊星キャリアの各々の回転によって左右の第1の脚が前後に揺動するように構成され、後側の左右には第2の脚が設けられ、遊星キャリアの各々はそれぞれ別個の動力伝達機構を介して左右の第2の脚に連結され、遊星キャリアの各々の回転によって左右の第2の脚が前後に揺動するように構成され、第2のモータは歯車機構を介して一方の内歯歯車と連結され、第2のモータの動力によるその内歯歯車の回転によって左右の脚の相対位置を変更可能となるように構成されている。
(もっと読む)
人形玩具の骨格構造及び当該連結構造を備えた骨格部材並びに当該骨格部材を外皮部材によって被覆した人形玩具
【課題】 ボールジョイント方式の連結構造を採用した骨格部材に近い可動範囲を有し、また、パーツを交換したり、新たなパーツを追加することなく、同じパーツを用いながら異なる体格に変形させることができる人形玩具の骨格構造を提供する。
【解決手段】 隣り合う骨格パーツが連結パーツを介して連結される人形玩具の骨格構造において、前記隣り合う骨格パーツに対してそれぞれ前記連結パーツを挟むことができる間隔を空けて伸びる一対の支持片を設け、当該連結パーツを当該一方の骨格パーツの両支持片間に挟んだ状態で回転可能に軸止めすると共に、当該他方の骨格パーツの両支持片間に挟んだ状態で回転可能に軸止めし、当該連結パーツの当該一方の骨格パーツに対する回転の軸と当該他方の骨格パーツに対する回転の軸とがねじれの位置となるようにする。
(もっと読む)
ムーブメントトイ
【目的】
磁石の回転運動により、擬似生物構造体が水中で規則正しい動きと予測のつかない1/fゆらぎの動きをするムーブメントトイを得る
【構成】モーターを備えた磁石回転駆動部、1つ以上の磁石を装着し、フレキシブルな構造の擬似生物構造体及び水および粒子をいれる容器から構成される。
(もっと読む)
人形玩具
【課題】単に腕部、脚部を交換して人形玩具の外観を変えて遊ぶ人形玩具から、新たな発想の胴体部1に腕部、脚部を取り付けて、従来の遊び方とは全く異なる新規の人形遊びを楽しむことのできる人形玩具を提供すること。
【解決手段】人形玩具は、頭部および胴体部1の骨格を構成する骨格部材4と、該骨格部材4に着脱自在に形成された腕部材2、脚部材3とで構成し、上記骨格部材4には粘土5を付着させて頭部及び胴体部1の外観を形成するようにした。
(もっと読む)
形状保持性を有する玩具用芯材及びその芯材を備える玩具
【課題】 軸芯部位の動きがスムーズであり、折り曲げ反復耐久性があるとともに、容易に変形可能で形状保持性を有し、組立てコストの安価な軸芯部材、ならびにリアルな動きをする可動性部分を有する玩具を提供する。
【解決手段】 熱可塑性樹脂製成形物を、延伸または圧延することによって得られた、90度の曲げ戻り角が30度以下で、曲げ強度が10〜300Nである棒状物からなる芯材は、手で変形可能であり、その形状を保持することができ、折り曲げ反復耐久性がある。
また、芯材は玩具あるいは人形の芯材として適しており、取り扱いが安全で、必要部分を屈曲等することで自由に形状を変化させることができ、さらにその形状を保持することが可能な玩具を得る。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】小型且つ簡単な構成でロボットのエネルギー消費を低減しつつ、脚体の関節アクチュエータの負担を軽減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置11はばね手段21(気体ばね)を備えており、シリンダ23内のピストン24がロボットの脚体3の膝関節8における大腿部4および下腿部5の相対的変位運動(屈伸運動)に応じて上下動する。ピストン24の上下の気室25,26に気体が充填されている。膝関節8での曲げ度合いが所定値以下であるときには、気室25,26がシリンダ23内の溝28を介して連通して、ばね手段21は弾性力を発生せず、曲げ度合いが所定値を超えると、気室25,26が互いに密封状態となってばね手段21が弾性力を発生し、その弾性力が膝関節8に補助駆動力として作用する。
(もっと読む)
脚式移動ロボット
【課題】足部に帯電する静電気を効果的に放電して除去するようにした脚式移動ロボットを提供する。
【解決手段】基体と、2本の脚部と、そのそれぞれの先端に足関節を介して連結される足部22と、足部22と脚部の間に配置されて足関節を駆動する電動モータ20と、足部と脚部の間に配置されて足部22が接地する床面Fから作用する床反力を検出する6軸力センサ56とを少なくとも備えると共に、足部22に床面と接地するときの衝撃を緩衝する緩衝部材224を備えてなる脚式移動ロボットにおいて、足部22の緩衝部材224に導電部材226を設ける。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】簡単な構成で電磁開閉弁の電力消費を効果的に低減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置12は、気室16,17に通じる気体流通路22の電磁開閉弁23を閉弁した状態で気体の圧縮または膨張によって、脚体3の膝関節(特定関節)8での屈伸運動に伴い補助駆動力を発生して、膝関節8に作用させる。電磁開閉弁23の開弁状態では、補助駆動力は発生しない。電磁開閉弁23は、自己保持機能を有する電磁開閉弁で構成され、電磁開閉弁23を閉弁状態とする所定期間で、気室16,17間の圧力差が弁体の閉弁方向に作用するように気体流通路22に介装される。
(もっと読む)
脚式ロボットとその制御方法ならびに歩容データの作成装置と作成方法
【課題】 脚式ロボットが、脚リンク群(特に接地脚)を伸ばしながら歩行することを可能とする技術を提供する。
【解決手段】 脚式ロボットは、体幹と、基端が体幹に揺動可能に連結されており、先端に足先を備えている複数の脚リンクと、事前に準備されている歩容データを、実際の歩行状態に基づいて補正する手段と、脚リンク毎に、補正した歩容データの体幹目標位置に基づいて基端位置を特定する手段と、脚リンク毎に、特定した基端位置を鉛直方向に移動したときに補正した歩容データの足先目標位置からの距離が所定距離となるときの鉛直移動量を計算する手段と、脚リンク毎に計算した鉛直移動量から鉛直下方に最大の移動量を選択する手段と、補正した歩容データの体幹目標位置の鉛直座標を選択手段で選択した鉛直移動量だけ鉛直方向に修正する手段とを備える。
(もっと読む)
脚式移動ロボット
【課題】 足部に設けられる床反力検出器の小型化・軽量化が可能な脚式移動ロボットを提供する。
【解決手段】 6軸力センサの中心Pbは、ロボットの起立静止状態において平面視で板バネ部S1〜S4の底面側に設けられた接地領域のうちの最遠点までの距離が最小となる位置Pa上に設けられており、平面視で6軸力センサの中心Pbから各板バネ部S1,S2,S3,S4の底面の接地領域それぞれの最遠点までの距離L1,L2,L3,L4が等しくなっている。そして足首関節の中心Pcは、平面視で位置Paに対して後方にオフセットしている。
(もっと読む)
脚式移動ロボット
【課題】 簡素な構造でありながら、着地時の衝撃を吸収でき、軽量化された足部を備えた脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボットの足部17は、板バネ部S1,S2,S3,S4を備えている。板バネ部S1,S2,S3,S4は、それぞれ板バネであるバネ部62b1,62b2,62b3,62b4と、減衰機能を有する第一の中間部材と、滑り止めの機能を有する第一の足底部材64と、を備えており、床面に接地した際に、撓みつつロボットの自重を支持する。
(もっと読む)
動作人形
【課題】人形を動作させると共に、人形下部にターンテーブル部を設けて、人形を回転させ、人形周囲の人に対して、人形の動作を見せることが可能な動作人形を提供することを課題とする。
【解決手段】頭部、左腕部、右腕部、左足部を動作させる動作部を有する人形体と、前記人形体を乗せ回転するターンテーブル部と、音楽情報を記憶した記憶手段と、音声出力を行う音声出力手段とを構成する。
(もっと読む)
足部走行機構及びそれを備えた2足歩行ロボット
【課題】 既存の歩行ロボットの足底に容易に取り付けることができ汎用性に優れ、平坦な路面において高速且つ高効率で移動することができる足部走行機構の提供、及び、整地や平坦な路面においては車輪による走行ができるので、高い安定性及び移動性を有する足部走行機構を備えた2足歩行ロボットの提供を目的とする。
【解決手段】 本発明の足部走行機構3は、脚部の足底にそれぞれ配設される足部フレーム10a,10bと、足部フレーム10a,10bの一方の側部に前後に配設された能動車輪部11a,11b及び受動車輪部13a,13bと、能動車輪部11a,11bを回転駆動する駆動部12a,12bと、足部フレーム10a,10bの他方の側部に前後に配設された摩擦接地部14と、を備えた構成を有する。本発明の2足歩行ロボット1は、左右の脚部と、脚部の足底に配設された足部走行機構3と、を備えた構成を有する。
(もっと読む)
101 - 120 / 127
[ Back to top ]