
Fターム[2C150DA28]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 足 (127)
Fターム[2C150DA28]に分類される特許
41 - 60 / 127
人形体
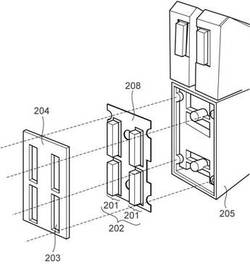
【課題】人形体においてよりダイナミックなポーズを容易に実現させる構造を提案することを目的とする。
【解決手段】凸部を有する部材が形成されている人形体である。例えば、足裏に、凸面と前記凸面を囲む側壁部とからなる凸部を有する第1の部材と、開口部を有する第2の部材とが積層して設けられており、第1の部材は、第2の部材により固定されるように設けられ、側壁部は、厚みが凸面の厚みよりも薄く形成された薄部を有しており、凸部は開口部を介して露出されている。なお、凸部は、少なくとも2つ以上設けられていることが好ましい。
(もっと読む)
脚式移動ロボット

【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
ロボット玩具
【課題】サーボモータのリード線が弛むことなく、しかも外部に露出することのないロボット玩具を提供すること。
【解決手段】サーボモータが内蔵されたサーボモータユニットを備え、サーボモータによる駆動によって、隣り合う2つのブロックの間で構成される関節部に屈伸動作をさせる関節ロボット玩具であって、一方のブロックには、軸線が同一直線上に位置する出力軸及び固定軸がケースから突出して形成されたサーボモータユニットが設けられ、他方のブロックには、サーボモータユニットの出力軸に固定されてサーボモータユニットの軸線を中心に回動可能に連結される連結部が設けられ、サーボモータユニットの内部機器に接続されたリード線は、サーボモータユニットの固定軸の軸心から導出されると共に導出部分が一方のブロック又は他方のブロックに固定的に支持され、導出部分は、屈伸動作に追従して、軸心導入部分を中心に回動可能に構成されている。
(もっと読む)
脚式ロボットの脚関節駆動装置及びその制御方法
【課題】 簡単な構造で、受動歩行、受動動的歩行能動的歩行の3種類の歩行を、駆動モータの制御のみで実現することができる脚式ロボットの脚関節駆動装置及びその制御方法を提供すること。
【解決手段】 少なくとも2本の線・条の一端を回転運動出力軸端の軸心部に固定するとともに、他端を前記回転運動出力軸方向に沿う運動を行う運動体の、回転運動出力軸心から半径方向にAだけ離隔する部位に固定し、前記回転運動出力軸の回転によって2本の線・条に捩りを生ぜしめて回転運動を回転運動出力軸方向に沿う運動を行う運動体の変位に変換するようにした運動変換装置を、脚式ロボットの腰関節、膝関節、および足首関節の少なくとも1つに装着した脚式ロボットの脚関節駆動装置。
(もっと読む)
歩行ロボット
【課題】2足歩行ロボットの安定歩行には、ジャイロやセンサー類を使い、特殊な計算を行うなど高度な技術が必要になる。従来、玩具用などに簡易化された歩行ロボットの試みもされているが、見栄えに問題がある。
【解決手段】安定した歩行のため、ロボットの足裏に摩擦の大きい部分と摩擦の小さい部分を設け、足裏を回転させることで床面に接する部分を切り替えるようにした。そして足を運ぶときは足裏を摩擦の少ない状態にして、床の上を滑らせた。反対側の足は摩擦の大きい状態にして床面を捉えるようにした。これによって常に両足が床に付いた状態で歩行でき、安定度が向上し、ジャイロなどを使わなくても安定で、見栄えの良い歩行が可能になった。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
擬似ペット
【目的】擬似ペット同士が互いに自発的に交信・交流を行うことができる擬似ペットもしくは縫ぐるみ等のキャラクタ形態物を提供する。
【構成】ユーザーが連れて歩く擬似ペット(コンピュータを含み、電気的に作動する装置で、肉体に相当する部分を有するもの)であって、近傍のエリアにある他の擬似ペットに受信されるように、「擬似ペットによる所定の挨拶信号」を、無線で送信するための挨拶信号送信手段と、近傍のエリアにある他の擬似ペットから無線で送信された「擬似ペットによる所定の挨拶信号」を受信するための挨拶信号受信手段と、を含むことを特徴とする擬似ペットもしくは縫ぐるみ等のキャラクタ形態物である。
(もっと読む)
人形玩具
【課題】環境温度の変化と太陽光の照射の何れにも反応して皮膚の色調が変化する興趣性を高めた人形玩具を提供する。
【解決手段】胴部2、頭部3、左右の腕部4,4及び左右の脚部5,5で構成され、各部材が塩化ビニル樹脂にサーモクロミック材料及びフォトクロミック材料を配合してなる成形材料を用いて成形され、環境温度の変化及び太陽光の照射により色調が変化する人形玩具1とする。
(もっと読む)
人形の関節構造及び該関節構造を備えた人形
【課題】 関節を屈曲させた際に各部材間に生じる隙間を狭くすることができる人形の関節構造を提供する。
【解決手段】 一対の外装部材と両外装部材の間に位置付けられる関節部材とが各部材の中空部に通された弾性体によって互いに牽引されることによって連結されている人形の関節構造において、いずれか一方の外装部材の先端部における関節の屈曲方向側に位置する外装面を切り欠いてなる切欠部を形成し、関節部材から一方の外装部材の先端部に形成された切欠部を塞ぐように干渉緩和片を伸ばし、関節を所定角度以上屈曲させない状態において干渉緩和片が一方の外装部材の外装面の一部となり、関節を所定角度以上屈曲させた状態において他方の外装部材の外装面が干渉緩和片と干渉して干渉緩和片が一方の外装部材の内方へと沈み込むことで切欠部に窪みが形成されて該窪みに他方の外装部材の先端部における関節の屈曲方向側に位置する外装面が嵌り込むようにする。
(もっと読む)
人形の関節
【課題】関節部の美観を損なわず、かつ、関節部を深い屈曲角度に屈曲させることが可能な関節部を提供する。
【解決手段】人形の胴体に連結される第一部材7と、該第一部材7の端部に関節部1を介して屈曲可能に連結される第二部材8とで構成される棒状部材における関節部であって、関節部は、一端側関節部と、他端側関節部と、一端側関節部と前記他端側関節部を回転可能に連結する一対の連結部とからなり、連結部は、一端側軸機構と、一端側角度規制機構と、一端側軸機構と平行に所定距離離間した他端側軸機構と、他端側関節部の回転角度を規制する他端側角度規制機構と、各機構を被覆し、関節部の伸長状態から屈曲状態において、前記第一部材の端部及び第二部材の端部と一体となった外観をなす一対の曲面部を含む。
(もっと読む)
人形製造方法
【課題】伸縮性のあるものを身体に密着して装う人形を効率良く低コストで製造できる生産性に優れた人形製造方法を供する。
【解決手段】素体部位2と被覆部位3L,3Rとからなる人形素体1を作成する人形素体作成工程と、伸縮自在に編んで筒状に形成した伸縮性のある長尺筒状体Sを、被覆部位3L,3Rに対応する長さに切断して筒状被覆体Spを切り出す筒状被覆体切出工程と、筒状被覆体Spを伸長させながら被覆部位3L,3Rに被せる被覆工程と、筒状被覆体Spが被せられた被覆部位3L,3Rを素体部位2に接合する組立工程とから少なくともなる人形製造方法。
(もっと読む)
動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラム
【課題】プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラムを得ることを目的とする。
【解決手段】資料の説明を受けている来場者の反応量を測定する反応量測定部2を設け、身体制御部3が反応量測定部2により測定された反応量に応じて身体を制御する。これにより、プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる。
(もっと読む)
形態変形玩具用脚部材
【課題】足部に対する脛部の可動範囲を大きくしても、外観の美感を損ねることがない形態変形玩具用脚部材を提供する。
【解決手段】 第1のリンク部材29が、第2のリンク部材31の主要部である円板部31bを覆うことができる形状構造を有する。第2のリンク部材31が、第2の回り対偶の回転中心(軸部29iの軸中心)を中心にして所定の角度範囲を回転する際に、第2のリンク部材31における第3の回り対偶を形成する部分(31c、31d)は、第1のリンク部材29の外側に露出する。脛部の形状構造と、第3のリンク部材33及び第4のリンク部材35の形状構造とを、脛部を足部に最も近づけた状態のときの脛部の回動範囲(第1の角度範囲θ3)よりも、脛部を足部から最も離した状態での脛部の回動範囲(第2の角度範囲θ4)が大きくなるように定める。
(もっと読む)
走行駆動装置
【課題】振動を利用して滑らかに移動させることが可能な走行駆動装置を提供する。
【解決手段】上下に延在し下端部が自由端の板状部材からなる一対の足部1aを備える。その各足部1aに対し振動を付与する一対の振動モータ2を備え、電池から電力が供給される。各足部1aは、鉛直方向Vに対し板厚方向へ傾斜している。
(もっと読む)
鉄棒ロボット
【課題】 鉄棒で大車輪をするロボットの回転を継続させるため、慣性モーメントの強弱出来ることを可能にして、簡単な構造で、大車輪の継続が出来るようにする。
【解決手段】 ロボットの動作の電源は、ロボットに電池を内蔵し、受信機とサーボモータもロボット内に内蔵して、制御信号には、外部の送信機からの無線を使います。
大車輪で上昇時、回転半径を小さくする為、サーボモータで、ロボットの腕と脚を同時に屈曲させるて、慣性モーメントを小さくし、大車輪の継続を可能にする。
(もっと読む)
2足歩行ロボット
【課題】浮揚自在で、軽量化と構造の簡素化を実現した2足歩行ロボットを提供すること。
【解決手段】2つの股関節2a,2bに左右の脚部が装着され、該股関節2a,2bが接続部材1に接続されてなる2足歩行ロボット10であり、股関節2a,2bはロボットを進退させるべく左右の脚部を前後方向に回動させる駆動装置2a1,2b1を備え、左右の脚部の双方には、略平坦なルーバー8,8がその長手方向を脚部の長手方向に向けた姿勢で、一方の脚部における他方の脚部に対向する側面に装着されており、ダクテッドファン7が第2、第3の駆動装置91,92を介して、ファンの回転軸73を一方の脚部側から他方の脚部側へ回動自在に装着され、かつ、ファンからの吹き出し流れがルーバー8,8に直射されるようになっており、股関節の動作に応じたルーバー8,8の傾斜によって浮揚方向が調整される。
(もっと読む)
弾性締結具及びこれを用いたアクチュエータモジュール
【課題】工具無しで、手でも簡便に分解結合することができ、堅くかつ反復的な分解結合が可能な弾性締結具及びこれを用いたアクチュエータモジュールを提供する。
【解決手段】本弾性締結具は、被結合材に形成された挿入孔に弾性的に挿入可能な中空型ソケット200と、中空型ソケットの中空に結合される固定ピン100とを含むことを特徴とする。一方、アクチュエータモジュールは、弾性締結具の挿入のための少なくとも1つの挿入孔を具備した第1側板と、同第2側板と、互いに対向する2つの側面を含むハウジングと、上記ハウジング内に内蔵されたアクチュエータの駆動軸に結合され、少なくとも1つの挿入孔を具備した平板形状の第1連結部材と、上記第1連結部材に形成された挿入孔に弾性的に挿入可能になる中空型ソケット及び上記中空型ソケットの中空に結合される固定ピンとを含む弾性締結具とを含んでなることを特徴とする。
(もっと読む)
羽子板などの飾り物
【課題】伝統的な技法の押絵のもつ立体感だけでなく、人物全体に自然な立体感を付与するとともに、リアリテイのある人物を有し、また耐久性と安定性のある人物を有する羽子板などの飾り物を提供する。
【解決課題】複数の押絵を組み合わせ一体的に形成された衣装部1と、衣装1を配置する板部25と、衣装部1の裏面に配置された柱状保持部10と、立体構造の頭部30とを備え、凸状に湾曲するアーチ状の衣装部1を板部25に配置し、衣装部1の上部から柱状保持部10に保持された頭部30が突設する人物29を有する。
(もっと読む)
ロボット玩具およびその組立方法
【課題】ロボット玩具のホームポジションとサーボ・ゼロ位置とを簡単に合致させることができるロボット玩具およびその組立方法を提供すること。
【解決手段】サーボが取り付けられた一のブロックと、軸孔に前記サーボの出力軸が嵌合することによって前記一のブロックに連結される他のブロックと、前記軸孔の径を、前記出力軸に遊嵌する状態と、前記出力軸に嵌合する状態との間で変化させる軸孔径調整部材とを備える。
(もっと読む)
人形体
【課題】 人形体において、関節を再現する連結部分を容易に揺動させることができる一方で、所定の角度で当該連結部分を長時間維持させることができるようにする。
【解決手段】 胸部102と腰部103とが回動可能に連結された人形体であって、胸部102に回動可能に接続され、直立状態において、腰部103に対して、第1の当接位置と第2の当接位置にて当接させることが可能な当接部301を備え、当接部301は、直立状態において、腰部103を回動させた場合に、前記第1の当接位置にて腰部103より受ける力のうち、当接部301を回動させるように作用する力の向きと、前記第2の当接位置にて腰部103より受ける力のうち、当接部301を回動させるように作用する力の向きとが、反対方向となるように構成されていることを特徴とする。
(もっと読む)
41 - 60 / 127
[ Back to top ]