
Fターム[2D129BA05]の内容
Fターム[2D129BA05]に分類される特許
241 - 253 / 253
先行削孔工法
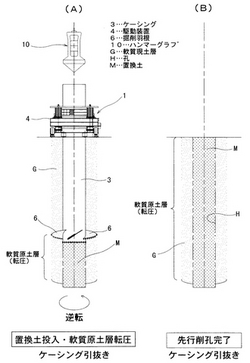
【課題】ケーシング等の設備の小型化を図るとともに、先行削孔としての口径を維持しながら掘削量および排土量を少なくして、経済性に優れ、しかも周囲の環境への影響を最小限にとどめた先行削孔工法を提供する。
【解決手段】硬質地盤の掘削に先立ってそれよりの軟質の土質地盤に置換する先行削孔工法である。外周に螺旋状の掘削羽根6を備えたケーシング3を旋回させながら地中に圧入して、ケーシング3内部の土をハンマーグラブ10にて掘削・排土しながら所定深度まで削孔する。同時に、ケーシング3とともに旋回する掘削羽根6によりケーシング3の外周側の土を所定深度まで掘削して軟質原土層Gとする。その後、ケーシング3の内部に置換土Mを投入しながらケーシング3を逆転旋回させて引き抜く。
(もっと読む)
連結式オーガー及びそれを使用したオーガー駆動装置

【課題】 従来の連結式オーガーは連結部分が締まりすぎて取り外しが困難であった。
【解決手段】 連結する一方のオーガーの一端と他方のオーガーの他端に互いに係止する非空転連結部と、互いに連結・離脱可能な抜け止め連結部を形成し、非空転連結部は一方のオーガーの一端に形成された差込部と、他方のオーガーの他端に形成されて前記差込部を差し込み・抜き取り可能とした受け部で構成し、差込部の外周面形状と受け部の内周面形状は差し込み・抜き取り可能であるが、互いに係止して空転はしない多角形に形成し、前記抜け止め連結部は一方のオーガーの軸の外周に空転可能に設けた連結治具と、その連結治具を連結できるように他方のオーガーに形成された止め部とで構成した。
(もっと読む)
土壌の入れ替え方法及びそれに用いるジョイント装置
【課題】 土壌を比較的深い深度まで局部的かつ垂直に掘削して別の良質な土壌と入れ替えることができる、簡便で効率的な土壌入れ替えのための技術を得る。
【解決手段】 アースドリル機1を使用し、その駆動軸7に結合用治具10を取り付けると共に、この結合用治具10に円筒形のケーシング11を結合する工程と、上記駆動軸7からケーシング11に回転力及び推力を作用させることによって該ケーシング11を地中に圧入する工程と、該ケーシング11の内部を掘削して掘削土を搬出する工程とを行ったあと、該ケーシング11の内部に別の良質土壌を埋め戻す工程を行い、そのあと、上記駆動軸7を再びケーシング11に結合して該ケーシング11を引き抜く工程を行う。
(もっと読む)
掘削機
【課題】 掘削作業等を行う場合に用いられる全高が低い所謂低空頭型の掘削機に於て、高さ制限がある狭隘な現場で掘削作業とクレーン作業の両方を行える様にする。
【解決手段】 車体2、走行体3、旋回体4、旋回台5、マスト6、昇降体7、回転駆動装置8、クレーンアーム9とで構成し、とりわけ旋回体4の前側に旋回体4の旋回軸Aとは偏心した偏心軸Bを中心に旋回可能な旋回台5を設けると共に、この旋回台5に低揚高のマスト6を前後傾倒可能に設け、然もマスト6の上部にその先端と回転駆動装置8の中心とが偏心軸Bを中心として所定角度θだけ離間されたクレーンアーム9を設ける。
(もっと読む)
片押し推進工法による管敷設工法
【課題】推進抵抗や曲げ抵抗を小さく抑えることができ、動力源が小さなもので済む片押し推進工法による管敷設工法を提供する。
【解決手段】先端に曲線施工可能なビット4を有するパイロット掘削ツールス1により、地中に曲線部を含むパイロット孔35を掘削する工程と、パイロット掘削ツールス1をガイドとしてその外周に、先端にリングビット21を有するケーシングパイプ20を建て込む工程と、パイロット掘削ツールス1を回収する工程と、ケーシングパイプ20の内部に敷設管を挿入する工程と、敷設管を残置したままケーシングパイプ20を回収する工程とを備えてなる。
(もっと読む)
オーガヘッド交換装置
【課題】 簡易な構成で作業員が容易かつ安全にオーガヘッドの交換ができ、作業時間も短縮できるオーガヘッド交換装置を提供する。
【解決手段】 圧入機1に水平アーム11を水平方向回動自在に取り付け、上記水平アーム11の先端に吊下アーム13を取り付けると共に、上記吊下アーム13を水平アーム11に対して上下方向移動可能に取り付け、かつ吊下アーム13には過荷重を吸収する緩衝材15を取り付けると共に、上記吊下アーム13の下端に支持アーム17を水平方向回動自在に取り付け、この支持アーム17の先端に、オーガヘッドを載置するヘッド支持台19を固定した。
(もっと読む)
杭孔掘削機
【課題】よりスムーズで合理的に組立可能な杭孔掘削機を提供する。
【解決手段】走行用クローラ装置10は、自身を持ち上げ支持可能な複数のアウトリガ14、14・・を備えた走行ベース11と、該走行ベース11に組付けられるクロスビーム12、12と、該クロスビーム12に組付けられるクローラトラック13、13・・とを備えており、各アウトリガ14を、走行ベース11を持ち上げ支持する第一位置と、クロスビーム12を走行ベース11へ組付ける際に前記クロスビームを所定の組付け位置にガイドする第二位置とに移動可能に設ける。また、クロスビーム12にアウトリガ14と接続可能なブラケット17、17を設ける。
(もっと読む)
掘削爪、ホルダ、及び掘削手段
【課題】掘削抵抗が大きい硬質地盤でも使用できる掘削爪、ホルダ、及び掘削手段を提供する。
【解決手段】地盤を掘削する刃部11の後側で、掘削手段に設けられた支持孔41内に挿入される軸部20とを備える掘削爪10である。軸部20には、軸部の前側で、支持孔41の内面と係合して刃部11の角度を軸回りに回転不可に決めるとともに、掘削時にかかる力が作用する回り止め部21と、回り止め部21の後側で、支持孔41の内面に係合して軸部20を軸方向へ移動不可とするとともに、変形して支持孔41の内面への係合を解除して軸部20を軸方向へ移動可能とする抜け止め部30と、抜け止め部30の後側で、支持孔41の内面と当接して掘削時にかかる力が作用する後端部22とを備え抜け止め部30を変形させて軸部20の軸方向への移動を規制することができる。
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法
【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
掘削径可変ドリル
【課題】単一のビットユニットで異なった掘削径の掘削を可能とするのに加えて、ビットユニットの引き上げ後の再掘削においても、同じ掘削径に自動で復帰することを可能とする。
【解決手段】1または複数の枢軸用孔7が円周方向に沿って形成され、ドリルロッド2の先端に取り付けられるボディー本体4と、枢軸8が挿入されることによりボディー本体4に取り付けられるビットアダプタ5と、偏心した取付軸用孔12に取付軸13が挿入されることによりビットアダプタ5に取り付けられるビット本体6と、相互に嵌合及び離脱可能な状態でボディ本体4とビットアダプタ5との対向面に形成された凹凸からなり、相互の嵌合位置を変えることにより掘削径を変更可能とする掘削径変更機構20と、掘削径変更機構20の凹凸が相互に嵌合可能な位置となるようにボディ本体4に対するビットアダプタ6の回転角度を複数位置に選択的に規定する回転角規定機構30とを備える。
(もっと読む)
削岩機用の伸縮式送りビーム
互いに長手方向に動くように配設された下部ビーム(1)および上部ビーム(2)を含む、削岩機用の伸縮式送りビーム。下部ビーム(1)の断面は、下部ビーム下側が溝状開口空間(1b)となっている。この溝には、下部ビーム(1)と上部ビーム(2)の間の移動シリンダ(5)が装着される。  (もっと読む)
(もっと読む)
光ファイバ装着チューブ、その製造方法及びその使用方法
本発明は光ファイバ装着チューブ、及びその製造方法と使用方法に関するものである。光ファイバ装着チューブは、チューブの内部に展開された光ファイバ・チューブ、ダクト内に少なくとも1本以上の光ファイバを持つ光ファイバ・チューブ、坑道環境に適合するように通常は金属材料で構成されるダクトに関するものである。本発明はまた、チューブ内に液体を加圧注入し、加圧注入された液体の流れの中で光ファイバ・チューブを推進することによってチューブ内に光ファイバ・チューブを展開することにも関するものである。本発明は坑道に展開されたチューブ内に挿入された光ファイバを用いて坑道内と地面との通信も提供する。ある実施例においては、この通信は地面の無線通信システムと組み合わされる。また別の実施例では、チューブをコイル状チューブとして、光ファイバ・チューブをコイル状チューブの中に挿入し、このチューブをリールに巻き取ったり、坑道に展開したりすることも可能である。 (もっと読む)
チューブラーのメイクアップの制御システム
第1チューブラー(106)と第2チューブラー(114)の間のねじ接続を行うためのメイクアップコントロールの方法とシステム(100)が提供される。このシステム(100)は第1チューブラー(106)に接続されたトップドライブ(101)と、少なくとも1つの命令信号をトップドライブに送る、トップドライブに作用上接続されたコントローラー(102)とを含む。トップドライブ(101)は少なくとも1つの命令信号に応答してトルクと回転スピードを発生し、トルクと回転スピードは第1チューブラーと第2チューブラーの間のメイクアッププロセスの間第1チューブラー(106)に加えられる。トップドライブ(101)はまたコントローラー(102)に伝達されるトルクフィードバック信号を発生し、コントローラーはメイクアッププロセスの間、第1チューブラー(106)に加えられるトルクと回転スピードを監視することができる。
コントローラー(102)はあらかじめ決定されたトルクリミットに到達した場合にはメイクアッププロセスを停止する。 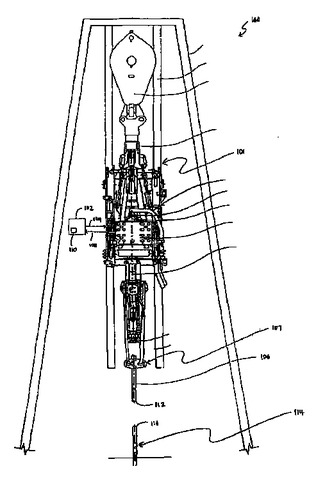 (もっと読む)
(もっと読む)
241 - 253 / 253
[ Back to top ]