
Fターム[2F062AA02]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 一次元 (264)
Fターム[2F062AA02]に分類される特許
81 - 100 / 264
車輌用部品の外形検査装置

【課題】 簡易な手段によって車輌用部品の外形等を検査する。
【解決手段】 ベース体2と、ベース体上に設けられ被検査面102a、102bを有する車輌用部品100が装着されて位置決めされる位置決め部3、3、・・・と、ベース体上における位置決め部の外周側に設けられた検査部5、5、・・・とを設け、検査部に、車輌用部品に対して離接する方向へ移動可能とされ検査時に車輌用部品の被検査面に突き当てられる突き当て部8、8、・・・と、被検査面に突き当てられたときの突き当て部の移動量を確認する確認部6d、6d、・・・、7d、7d、・・・とを設けた。
(もっと読む)
ストロークセンサ

【課題】簡素な構成として部品点数を低減するとともに、ストロークセンサが不要な車両に対して不要な部品の付け捨てを回避する。
【解決手段】コイルスプリング6を有する自動車用サスペンション装置のストローク量を検出するストロークセンサであって、コイルスプリング6の反発力を受けるスプリングシート8の撓み量に基づいてストローク量を検出する。
(もっと読む)
眼鏡レンズ枠形状測定装置
【課題】眼鏡レンズ枠形状測定装置において、そり角度の大きなレンズ枠の形状測定結果に対して、定量的な補正を可能とする。
【解決手段】演算制御回路52が、入力部56に入力されたそり角度θ1、倒れ角度θ2、倒れ量h、眼鏡レンズ枠LF,RFの縦方向の長さB、定数α,βなどの値により、保持棒3b4,3b6で保持された状態における眼鏡レンズ枠LF,RFの軸ずれの量または角度θ3を求め、測定して得られた眼鏡レンズ枠LF,RFの形状を、求められた軸ずれの量または角度に応θ3じて補正することで、精度のよい測定結果を得る。
(もっと読む)
接触式変位センサ
【課題】スタイラスと測定対象との間に生じる摩擦やスティックスリップの影響を低減して走査法により形状測定を行うことができる接触式変位センサを提供する。
【解決手段】被測定物100の変位を感知する接触式変位センサ1は、被測定物100に対して進退可能に取り付けられる可動軸3と、可動軸3の先端に取り付けられ、被測定物100の表面を走査されるスタイラス4と、スタイラス4と可動軸3との間に取り付けられる振動子5とを備え、振動子5は、振動子5のばね定数、振動子5とスタイラス4の取り付け部におけるばね定数と粘性係数、振動子5と可動軸3の取り付け部におけるばね定数と粘性係数、振動子5の等価質量、可動軸3の質量、及びスタイラス4の質量に基づいて決定される好適周波数帯域内の周波数で振動され、スタイラス4は所定の振幅で軸線方向に振動され、かつ可動軸3はほとんど振動しないことを特徴とする。
(もっと読む)
変位センサ
【課題】測定対象物に過度な押し付け力を及ぼすことなく測定することができ、そして、誤動作および劣化が抑制され、さらに、任意の向きに対して測定可能な変位センサを提供する。
【解決手段】変位センサ50のセンサ軸1の下端部に、触針2が取り付けられ、上端部には、変位検出ターゲット材3が取り付けられている。センサ軸1はラジアル軸受4により軸支されて、径方向の動きが拘束され、軸方向の動きが許容される。ラジアル軸受4として、静圧気体軸受が適用されている。静圧気体軸受では、ノズルから静圧気体軸受とセンサ軸1との隙間に向けて圧縮空気を送り込むことによって、センサ軸1を静圧気体軸受に接触させることなく、センサ軸1を径方向に支持することができる。
(もっと読む)
無段変速機のプーリシャフト組立体の寸法測定装置
【課題】無段変速機のプーリシャフト組立体に負荷がかかった状態を想定して、軸線方向に間隔を空けて存在する部位間寸法を測定する。
【解決手段】プーリシャフトを備えるプーリシャフト組立体の軸線方向に間隔を空けて存在する2つの軸受30、40間の寸法を測定する。組立体10の軸受外輪端面を支持するステージ面を有するステージ部材と、組立体の軸受外輪端面と接触可能なホールド面を有するホルダーと、ステージ面に対するホールド面高さL1が予め設定された基準高さとなるように、ステージとホルダー間寸法を規定するゲージ130とを備え、ステージ面とホールド面とで外輪端面の相互間を挟持し、ホルダー自重で外輪端面に外力を付加すると共にエアシリンダで外輪端面に外力を付加し、デジタルゲージ170とコントローラを用いて、基準高さLB1からのホールド面の落ち込み量を測定し、部位間寸法を測定する。
(もっと読む)
エキスパンションのべローズ肉厚測定装置
【課題】プラント運転中においてもエキスパンションのべローズ山部の肉厚と初期肉厚との肉厚比を測定可能とすることである。
【解決手段】エキスパンションのべローズ山部の肉厚比t/t0とエキスパンションのバネ定数比K/K0との関係曲線を予め記憶装置14に記憶しておき、バネ定数比算出手段13は、エキスパンションのべローズ谷部に配置された歪みセンサ11で検出したエキスパンションの軸方向または周方向の歪みと初期軸方向歪みまたは初期周方向歪みを用いて、バネ定数Kと初期バネ定数K0とのバネ定数比K/K0を算出し、肉厚比演算手段15は、バネ定数比算出手段13で算出されたバネ定数比K/K0及び記憶装置14に記憶した関係曲線に基づいてエキスパンションのべローズ山部の肉厚比t/t0を求め出力装置16に出力する。
(もっと読む)
リニアゲージ
【課題】可動部の回転運動を、より簡易に製作可能な構造で抑止する。
【解決手段】可動部を、測定子1を先端に固定したシャフト2、変位検出用のスリット板4、リニアガイド5、二つのローラユニット6と、これらを固定したホルダ3とより構成する。そして、測定子1及びシャフト2の測定子1側の一部がフレーム11の外部に突出し、かつ、リニアガイド5のリニアボールベアリング51に、フレーム11に固定した第1ガイドポール12が挿入され、各ローラユニット6の二つのローラ61の間に、フレーム11に固定した第2ガイドポール13が挿入された形態で、可動部をフレーム11に収容する。また、可動部のホルダ3は、バネ15によって、測定子1側に付勢する。
(もっと読む)
測定装置及びこの測定装置を使用した変位測定方法
【課題】簡易な構成、方法によって、乗客コンベア各所における変位を測定する測定装置及びこの測定装置を使用した変位測定方法を提供することができる。
【解決手段】アクチュエータ2aを備える筒状の本体部2と、本体部2の一端に設けられ、アクチュエータ2aによって伸縮自在とされる可動部3と、可動部3に取り付けられ可動部の伸縮を測定する変位測定手段4と、本体部2の他端に設けられ、可動部3が伸縮することによって掛かる荷重を測定する荷重測定手段5と、アクチュエータ2aを制御する制御手段6とを備える。
(もっと読む)
変状計測装置
【課題】従来の光式変位センサや電気式変位センサ(伸縮センサ)を用いて、これらの伸縮計の機構を変えることなく低コストかつ簡便な機構と1台の一軸方向検出変位センサで2区間の変位を計測し、また、少ない台数で多数区間の変位箇所を特定する面的変状計測装置を提供する。
【解決手段】2つの移動杭の変位状態を計測する装置において、固定杭に固定された一軸方向検出変位センサと、同変位センサに繋がれた接続線と同接続線の一端に設けた変位伝達機構と、両端がそれぞれ前記各移動杭に連結され中途が前記の変位伝達機構に揺動もしくは摺動自在に張設され且つ移動杭の変位に追従して非伸縮状態で全体移動自在に張設された計測線とから構成されたことを特徴とする。
(もっと読む)
スポット溶接装置の電極消耗量計測方法及び電極消耗量計測装置
【課題】電極研磨加工の品質を確保しながらも、研磨作業と電極消耗量検出を同期処理可能にして溶接ラインの稼働ロスを低減可能にし、ロッド側とアーム側の両電極の消耗量検出を精度よく行える技術を提供する。
【解決手段】ドレッサー4を稼働状態として、可動側電極13をドレス刃21に押圧して整形研磨し、研磨完了時に可動側電極13の第1ドレス位置情報を取得し、固定側電極12をドレス刃21に押圧して整形研磨し、研磨完了時に固定側電極12の第2ドレス位置情報を取得し、予め取得した第1基準ドレス位置情報と今回取得した第1ドレス位置情報との差から可動側電極13の消耗量Xを算出し、予め取得した第2基準ドレス位置情報と今回取得した第2ドレス位置情報との差から固定側電極12の消耗量Yを算出する。
(もっと読む)
変位測定装置
【課題】建造物の変位を高精度に測定することができる変位測定装置を提供すること。
【解決手段】構造物に設けられて、前記構造物の変位を測定する変位測定装置であって、前記構造物に取り付けられる支持部と、前記支持部によって水平方向に移動可能に支持される支持体と、前記支持体と前記構造物又は前記支持部とに設けられ、前記構造物の前記水平方向の絶対変位を算出する絶対変位算出部とを備えることを特徴とする。これにより、建造物とともに支持部が水平方向に振動しても、支持体は水平方向にほとんど変位しないことから、支持体を基準として建造物の変位を高精度に測定することができる。
(もっと読む)
距離測定器
【課題】レールに沿って存在する二点間の距離の測定に伴う労力及び時間を低減させることができる距離測定器を提供する。
【解決手段】操作桿15が設けられレールRに沿って移動可能な基台11と、該基台11と一体となって移動し、レールRの表面上を転動可能な測定車輪40と、該測定車輪40の回転数を検出するセンサと、該センサから供給された検出信号を演算処理する演算部と該演算部の演算処理した情報を記憶する記憶部とが設けられたデータ収集器50と、該データ収集器50に対して記憶を行うように指示するスイッチ60と、前記基台11に設けられ基台11と測定点との相対的位置関係を示す指標体70とを備えることを特徴とする。
(もっと読む)
基準尺を挟持して固定するための装置
位置測定装置の基準尺(2)は、挟持部材(1)を用いて支持体(3)上に固定されている。挟持部材(1)は、第一の挟持力(F1)で基準尺(2)を取付面(31)上に押し付ける第一のスプリングアーム部(11)を有する。挟持部材(1)は、取付面(31)に対して垂直な方向に延びるストッパ面(32)上に第二の挟持力(F2)で基準尺(2)を押し付ける第二のスプリングアーム部(12)を有する。挟持部材(1)を支持体(3)上に固定することによって、第一の挟持力(F1)と第二の挟持力(F2)が一緒に生み出されている。 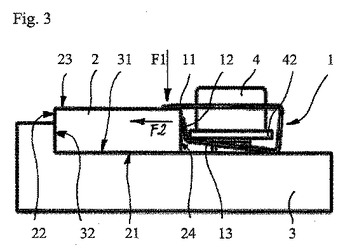 (もっと読む)
(もっと読む)
形状測定用プローブ制御装置
【課題】形状測定装置において、低測定力を維持したまま高速にプローブを測定面に追従させることができ、高速で高精度な測定を実現できる形状測定用プローブ制御装置を提供する。
【解決手段】X制御モード切換スイッチ41とY制御モード切換スイッチ45とを備え、測定物の形状、または測定時のXプローブ傾斜角度θXとYプローブ傾斜角度θYとの関係により、一方の軸で位置制御を、他方の軸で傾き制御を行うようにした。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】被測定物の高さ変位によってアームが回転した場合であっても、測定点を正確に算出可能な形状測定装置を提供する。
【解決手段】形状測定装置は、擬似測定点を取得した際におけるアームの基準位置からの回動角度に基づいて、接触子の表面形状を特定する接触子モデルの基準角度からの回転角度と、この回転角度における接触子モデルの形状を算出する接触子モデル形状算出部213を備える。測定点算出部216は、比較部215において接触子モデルの基準角度における形状と、接触子モデルの回転角度における形状との変位量がしきい値以下と判断された場合には、接触子モデルの基準角度における所定位置を測定点として算出し、比較部215において変位量がしきい値を超えると判断された場合には、接触子モデルの回転角度における所定位置を測定点として算出する。
(もっと読む)
試料の伸びの測定で用いられる変位センサ
試料の伸びの測定での使用のための接触式変位センサ:本発明は、引張りによる試料の伸びの機械的な測定での使用のための接触式変位センサに関する。本発明は、更に、接触式変位センサの使用だけでなく、そのような接触式変位センサを用いる試料の伸びの測定のための方法、そのような接触式変位センサを用いる試料の伸びの測定のためのシステムに関する。接触式変位センサは、試料が接触される要素を備えている。本発明によれば、要素は、回転可能に取り付けられており、試料が裂かれることが要素を回転させるように配置されている。裂かれた試料によって回転される要素によれば、小さなエネルギー量だけが接触式変位センサに転送され、接触式変位センサに過負荷が掛かったり破壊されたりしない。 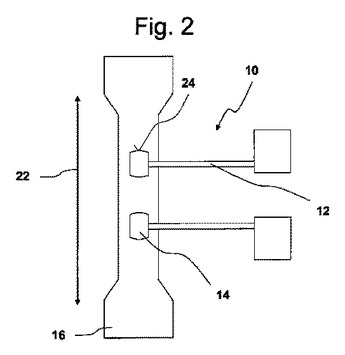 (もっと読む)
(もっと読む)
形状測定装置用プローブ及び形状測定装置
【課題】任意形状の被測定面を、被測定物を回転させることなく高精度で測定可能な、形状測定装置用プローブ及び形状測定装置を提供する
【解決手段】プローブ1は、揺動部材3、取付部材4、及び連結機構5を備える。揺動部材3は、測定物2の被測定面2aに接触するスタイラス8と、形状測定装置6が備える同一の集光レンズ23を通って集光されるレーザ光22a〜22cが照射されるミラー21a〜21cとを備える。揺動部材3は取付部材4によって形状測定装置6に取り付けられる。連結機構5は取付部材4に固定された載置台11と、揺動部材3又は載置台11に固定された支点部材12とを備える。揺動部材3は支点部材12の先端12bを支点として揺動可能である。
(もっと読む)
測定装置
【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
直線型変位計測装置
【課題】小型のリニアセンサを用いながら、正確に直線変位を計測することができ、したがって安価且つ防塵対策が容易であり、しかも原点位置の認識動作が不要で、ダンプ車などの特殊作業車のリフトシリンダのストローク量検出装置として採用して好適な直線型変位計測装置を得る。
【解決手段】ケーシング6に対して往復出退変位可能に構成された出退ロッド7のストローク量を計測する。出退ロッド7の出退変位に応じて変位する可動部51と、出退ロッド7のストローク量を少量化して可動部51に伝える変換機構と、可動部51の変位量を検出するアブソリュートタイプのリニアセンサ53とが、出退ロッド7およびケーシング6の内部に組み付けられている。可動部51の変位量をリニアセンサ53のセンサロッド59を介してセンサヘッド60で検出することにより、出退ロッド7のストローク量を検出できる。
(もっと読む)
81 - 100 / 264
[ Back to top ]