
Fターム[2F062AA04]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 三次元 (319)
Fターム[2F062AA04]に分類される特許
121 - 140 / 319
測定装置

【課題】コストダウンや制御性の向上が可能で、全体を小型化できる測定装置を提供する。
【解決手段】Yスライダ16に対して、Zスピンドル17をXスライダ14およびYスライダ16の移動方向に対して直交する方向へ移動可能にガイドするZ軸ガイド機構30Zを有する測定装置。ガイド機構は、Zスピンドルの対向する上下面にZスピンドルの移動方向に沿って平行にかつZスピンドルの軸を中心に対称配置された一対のガイドレール31Zと、Yスライダに配置されガイドレールに摺動可能に係合する複数の係合ブロック32Zとを有する。
(もっと読む)
変速機、及び測定機

【課題】可動距離に応じて大型化することがなく、製造コストを低減させることができる変速機の提供。
【解決手段】変速機7は、3つのボールベアリング81A,81B,81Cと、入力軸74と、出力用嵌合部材83と、出力軸72とを備える。各ボールベアリング81A,81B,81Cは、内輪と、外輪と、複数の転動体とを有している。入力軸74は、内輪に挿入される挿入部を有し、ボールベアリング81Aの回転軸回りに回転することで内輪を回転させる。内輪が回転すると、各転動体は、内輪の回転に伴って転動する。出力用嵌合部材83は、各転動体に嵌合される嵌合部831を備え、各転動体の転動に伴ってボールベアリング81Cの回転軸回りに回転することで出力軸72をボールベアリング81Cの回転軸回りに回転させる。
(もっと読む)
形状測定プローブ
【課題】接触子の押し付け力を原子間力に相当する微小力(例えば30mgf以下)に設定でき、被測定物の傷を防止し、面粗さ等の微細な形状測定ができ、測定面のうねりに追従でき、プローブのオーバーランによる接触子等の損傷を防止できる形状測定プローブを提供する。
【解決手段】被測定物の上面に沿って移動可能なプローブ本体10と、下端に設けられた接触子12aと接触子から上方に鉛直に延びる円筒形中間軸12bとその上端に設けられ中間軸より最大径が大きい鍔部12cとを有するスタイラス12と、プローブ本体の下端に取り付けられスタイラス12を鉛直にのみ移動可能にガイドするスタイラスホルダ14と、スタイラスホルダの上面と鍔部の下面の間に挟持され鍔部を上方に付勢する円板状の自重軽減バネ16と、プローブ本体に取り付けられ鍔部上面の変位を検出する位置検出センサ18(レーザーセンサ)とを備える。
(もっと読む)
三次元測定機の昇降装置
【課題】制御性への悪影響、精度悪化、機械寿命への懸念といったデメリットを解消しつつ、高加減速仕様に対応できる三次元測定機の昇降装置を提供する。
【解決手段】Yスライダ16およびZスピンドル17の重量を相殺するY軸バランス機構50Yと、Yスライダを昇降駆動させるY軸駆動機構40Yとを備える。Y軸バランス機構は、Yコラム15を挟んでYスライダ16とは反対側面に配置されたカウンタウエイト51と、Yコラムの上部および下部に設けられたプーリ52と、これらプーリに掛け回されYスライダ、カウンタウエイトに連結されたループ状のバランスワイヤ53とを含む。Y軸駆動機構は、Yコラムの上部および下部に設けられたプーリ41Ya〜41Yeと、これらプーリに掛け回されYスライダおよびカウンタウエイトに連結されたループ状の駆動ベルト42Yと、いずれかのプーリに連結されたモータ43Yとを含む。
(もっと読む)
座標測定システムのための方法
本発明は、対象物の特徴形状を測定するための方法であって、少なくとも特徴形状の表象を、少なくとも特徴形状の表面測定を介して複数のデータ点を取得することによって対象物上で得ることを含む方法に関する。対象物の少なくとも特徴形状をほぼ複製するモデルが、表象に適合される。モデルは、共通点で連結される少なくとも2つの独立的に可変の部分を定義するパラメータを含む。適合させることは、少なくとも2つの独立的に可変の部分の少なくとも1つを変えることによってモデルの形態を変更することを含む。方法はまた、少なくとも特徴形状に関する情報を適合されたモデルから得ることも含む。 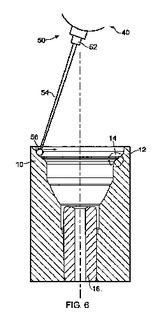 (もっと読む)
(もっと読む)
ワークの計測基準点設定機能を有する工作機械
【課題】ワークの中心座標を求めてワークの計測基準点として設定することができるワークの計測基準点設定機能を有する工作機械を提供すること。
【解決手段】加工面が直交する2つの線に対して線対称なワークを、機械座標系の軸と前記2つの線が平行となるように配置する。前記2つの線と平行な第1の線に沿ってワークの加工面上から機上計測装置のプローブの球型測定子をワーク端面に向かって相対移動させる。ワークの端面から球型測定子が離脱して後、プローブの軸方向の移動速度があらかじめ設定された所定速度になる時点の座標を記憶する(S2〜S11)。同様に第2の線に対しても行い座標を記憶する(S12〜S21)。記憶された座標から、それぞれの中点を求める。求められた中点の座標はワークの中心座標であり、ワークの計測基準位置として設定できる。
(もっと読む)
工作機械の接触検出装置
【課題】小型化できかつ信頼性を高めた工作機械の接触検出装置を提供する。
【解決手段】スタイラス2がワークに接触したことに応じて、可動接点保持部10により保持されている可動接点11,12,13のうちの少なくともいずれかを、対面する各対の鋼球31と32,33と34,35と36から離すことにより、電池6から抵抗素子25を介してトランジスタ26のベースに所定の電位を供給して、トランジスタ26を導通させ、発光ダイオード8を駆動することにより発光させて、ワークの接触を検知する。基板30にパターン電極40〜43を形成し、鋼球31〜36と、トランジスタ26と、抵抗素子25を基板30上に配置し、配線作業を簡略化する。
(もっと読む)
機上計測装置にて計測対象物の形状を計測する工作機械システム
【課題】機上計測を、直動軸と回転軸を含む同時多軸計測を行うようにし、機上計測装置の測定子の同一先端点で測定対象物の表面と接触して計測を行うことが可能な工作機械システムを提供すること。
【解決手段】一端に接触子を取り付けたプローブを有する機上計測装置1を用いて計測対象物の表面形状を計測する工作機械システムにおいて、前記計測対象物の表面に対して機上計測装置1のプローブ1bの中心軸が垂直になるようにプログラムされた計測プログラムに基づいて、球型接触子1fが前記計測対象物の表面に接触して倣うように前記各軸が数値制御装置により駆動制御されることを特徴とする機上計測装置にて計測対象物の形状を計測する工作機械システム。
(もっと読む)
測定機
【課題】フィードバック制御部の安定性を損なうことなく、高速応答性を向上させることができ、測定精度を向上させることができる測定機の提供。
【解決手段】表面性状測定機1は、被測定物Wに当接する接触子41Aと、被測定物Wの表面に倣って接触子41Aを移動させるセンサ駆動機構43と、センサ駆動機構43を制御する制御装置3と、被測定物Wに当接することで接触子41Aにかかる測定力を検出する力センサ41とを備える。制御装置3は、測定力の目標値を出力する目標値出力部31と、目標値に対する測定力の偏差に基づいて、センサ駆動機構43をフィードバック制御するフィードバック制御部32と、フィードバック制御部32に設けられるフィードバック補償器322とを備える。フィードバック補償器322は、測定力に応じてフィードバック補償する。
(もっと読む)
V溝形状測定方法および装置
【課題】回転テーブル上の被測定物のV溝形状の特性値を正確かつ確実に測定する。
【解決手段】測定子方向一定制御工程と、回転テーブル半径一定倣い制御工程と、2面接触倣い制御工程とを組み合わせ、被測定物のV溝を構成する2面に、常に倣いプローブ22の測定子24を接触させるV溝回転テーブル倣い制御工程を行い、プローブ22の倣い進行方向を、プローブ22の測定子24の中心位置の軌跡から求めて、倣い制御処理を行う。
(もっと読む)
産業機械
【課題】所定の異常が発生した場合に移動体を対象物から離脱させることができるとともに、移動体を移動させる際の負荷を十分に軽減させることができる産業機械の提供。
【解決手段】三次元測定機は、コラム243の内部をZ軸方向に沿ってスライド移動可能に設けられ、被測定物に対して接近離脱するスピンドル244と、カウンタウエイト71にてスピンドル244の重量を平衡させることでスピンドル244をスライド移動させる際の負荷を軽減する平衡機構7と、所定の異常状態が検出されたときに、スピンドル244が被測定物から離脱する離脱方向Aに向かってカウンタウエイト71を付勢する付勢手段8とを備える。
(もっと読む)
カムプロファイル測定装置
【課題】安価で、しかも、複数種のカムのプロファイルを高精度に測定できるカムプロファイル測定装置を提供する。
【解決手段】カム1のプロファイルを測定するカムプロファイル測定装置。カム1を回転させる回転機構20と、カム1の回転角度を検出する回転角度検出手段30と、カム1のカムフォロア当接位置に当接され、カム1が回転することにより所定方向へ移動するプローブ40と、このプローブ40を所定方向に沿って案内する案内機構50と、プローブ40の移動位置を検出する位置検出手段60と、を備える。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】被測定物の高さ変位によってアームが回転した場合であっても、測定点を正確に算出可能な形状測定装置を提供する。
【解決手段】形状測定装置は、擬似測定点を取得した際におけるアームの基準位置からの回動角度に基づいて、接触子の表面形状を特定する接触子モデルの基準角度からの回転角度と、この回転角度における接触子モデルの形状を算出する接触子モデル形状算出部213を備える。測定点算出部216は、比較部215において接触子モデルの基準角度における形状と、接触子モデルの回転角度における形状との変位量がしきい値以下と判断された場合には、接触子モデルの基準角度における所定位置を測定点として算出し、比較部215において変位量がしきい値を超えると判断された場合には、接触子モデルの回転角度における所定位置を測定点として算出する。
(もっと読む)
形状測定装置用プローブ及び形状測定装置
【課題】任意形状の被測定面を、被測定物を回転させることなく高精度で測定可能な、形状測定装置用プローブ及び形状測定装置を提供する
【解決手段】プローブ1は、揺動部材3、取付部材4、及び連結機構5を備える。揺動部材3は、測定物2の被測定面2aに接触するスタイラス8と、形状測定装置6が備える同一の集光レンズ23を通って集光されるレーザ光22a〜22cが照射されるミラー21a〜21cとを備える。揺動部材3は取付部材4によって形状測定装置6に取り付けられる。連結機構5は取付部材4に固定された載置台11と、揺動部材3又は載置台11に固定された支点部材12とを備える。揺動部材3は支点部材12の先端12bを支点として揺動可能である。
(もっと読む)
形状測定方法及び形状測定装置
【課題】側面形状測定において形状測定プローブの先端の移動量をレーザ光と4分割フォトダイオードを用いて高精度に測定する。
【解決手段】Z軸に沿って移動可能な形状測定プローブと、該形状測定プローブ内に一点で支持され先端がXY方向の力により傾斜可能でかつレーザ光を反射するミラーを有するスタイラスがあり、反射するレーザ光を4分割フォトダイオードに集光して得られる電気信号出力から該スタイラスの傾斜を検知して該スタイラス先端のXY方向移動量を得る3次元形状測定方法において、実測定に先んじて該電気信号出力から得られるXY方向移動量(TXm,TYm)の生データと真のXY方向移動量(TX、TY)の関係を求める参照テーブル測定工程によって参照テーブルを作成し該参照テーブルを用いて実測定した生データから補正した真のデータを得る。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】測定点を正確に算出する。
【解決手段】擬似測定点を取得する擬似測定点取得部212と、各擬似測定点から被測定物の表面へと向かう大凡の方向にガイドラインを生成するガイドライン生成部213と、接触子の表面形状を特定する接触子モデルの基準点を擬似測定点に一致させると共に測定時の接触子と接触子モデルとの姿勢を一致させて接触子モデルを配置する接触子モデル配置部214と、各ガイドラインと各配置された接触子モデルの表面とが交わる交点を取得する交点取得部215と、各ガイドライン上における交点の中から擬似測定点から最も離れた交点を測定点として取得する測定点取得部216と、接触子モデルの定義範囲に従い測定点を削除する測定点削除部217を備える。
(もっと読む)
三次元測定機
【課題】プローブを交換した場合や、プローブの姿勢を変更した場合であっても測定値の誤差を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、プローブ21と、プローブ21を保持するとともに、プローブ21を測定空間内で移動させる移動機構22と、移動機構22を制御するホストコンピュータとを備える。ホストコンピュータは、移動機構22に基準のプローブを保持させたときの基準球231の中心位置から基点BまでのプローブベクトルV1、及び移動機構22にプローブ21Bを保持させたときの基準球231の中心位置から基点BまでのプローブベクトルV2を記憶する記憶部と、プローブベクトルV1、及びプローブベクトルV2に基づいて、基点Bの誤差を補正するための補正ベクトルCVを算出する補正ベクトル算出部と、補正ベクトルCVに基づいて、基点Bの誤差を補正する基点補正部とを備える。
(もっと読む)
突起物探索装置および突起物探索方法
【課題】屋内における水平面から立ち上がっている面を対象にして、突起物の有無を探索することができる探索装置を提供する。
【解決手段】突起物探索装置は、長手方向に並ぶ複数の接触センサを有する複数の棒状体が横方向に配列した接触体1と、棒状体の長手方向が屋内における立ち上がり面(床等の水平面とは異なる面)と直交する状態で、棒状体の先端部分を屋内の側面と接触させつつ接触体を上下方向に移動させる接触体駆動部2と、接触体駆動部に接触体を移動させるための制御信号を出力する接触体移動制御部3と、接触体1が移動しているときに複数の棒状体における接触センサの検出信号を入力する接触情報入力部4と、接触情報入力部4が入力した検出信号にもとづいて、立ち上がり面における突起物の有無を検出し、突起物を検出した場合に突起物の形状を判別する突起物検出部5とを備えている。
(もっと読む)
三次元測定機
【課題】測定値の誤差を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機1は、測定子を有するプローブ21と、プローブ21を倣い移動させる移動機構22と、移動機構22を制御するホストコンピュータ5とを備える。ホストコンピュータ5は、移動機構22の移動量を取得する移動量取得部52と、測定値を算出する測定値算出部53とを備える。測定値算出部53は、測定子の位置の誤差を補正するための補正量を算出する補正量算出部と、移動機構22の移動量と、補正量とに基づいて測定子の位置の誤差を補正する補正部とを備える。補正量算出部は、プローブ21に設定された基準点におけるプローブ21の並進誤差を補正するための並進補正量と、基準点を回転中心とするプローブ21の回転角、及び基準点から測定子までのプローブ21の長さに基づくプローブ21の回転誤差を補正するための回転補正量とを算出する。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】誤差を抑制して回転テーブルの座標系を定める形状測定装置、形状測定方法を提供する。
【解決手段】形状測定装置は、回転テーブル50、回転テーブル50の表面から第1方向に距離h1をもって位置する基準球61b、回転テーブル50の表面から第1方向に距離h2(h2>h1)をもって位置する基準球61cを備える。制御部31は、回転テーブル50を回転軸周りに120°ずつ3回にわたって回転させ、120°回転毎に接触子17aを基準球61b、61cに追従させる。制御部31は、基準球61bの球心位置Ma11〜Ma13を通る円C1の中心位置O1と、基準球61cの球心位置Ma21〜Ma23を通る円C2の中心位置O2を求め、各中心位置O1,O2を通る直線A1をZT軸として算出する。
(もっと読む)
121 - 140 / 319
[ Back to top ]