
Fターム[2F062AA04]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 三次元 (319)
Fターム[2F062AA04]に分類される特許
41 - 60 / 319
プローブヘッド
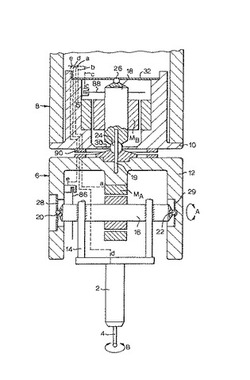
【課題】ロータリーカップリングによって下ハウジングを上ハウジングに対して連続的に回転させることを可能とするプローブヘッドを提供する。
【解決手段】測定プローブ2を支持する連結手首を有し、プローブを2つの回転軸A、Bのまわりに回転させるプローブヘッド6であり、ヘッドは装置と接続するための上ハウジング10と回転可能に接続し、第1モータMBによって上ハウジングに関して第1軸Bまわりに連続的に回転することができる、下ハウジング12と測定プローブに回転可能に接続し、第2モータMAによって下ハウジングに関して前記第1軸を横切る第2軸Aまわりに回転することができるキャリジ14と、第1軸まわりの連続的な回転を可能として少なくとも第2モータのための電力経路aを提供するロータリーカップリング90と、を具えた。
(もっと読む)
産業機械

【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
産業機械
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
三次元測定機
【課題】スピンドル内にエアーバランス機構を備えた構成において、外観を損なうことなく、スピンドルの上下動や測定精度にも影響を与えることが少ない三次元測定機を提供。
【解決手段】エアーバランス機構19を備えた三次元測定機。エアーバランス機構は、Z軸スピンドル12内に設けられたシリンダ20と、このシリンダ内に摺動可能に収納されたピストン29と、このピストンをガイド筒22等に支持する支持軸28と、ピストンで区画されたシリンダ内の押上力発生室201とを備える。プローブ13からの配線13Aを、シリンダの外面に接触させることなく、スピンドルの内面とシリンダの外面との間を通してスピンドルの外部へ導く誘導路43がZ軸スピンドル12の内部に形成されている。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
形状測定装置
【課題】プローブの運動の履歴に基づく測定誤差を補正することができ、測定精度を向上させることができる形状測定装置の提供。
【解決手段】形状測定装置1は、装置本体2と、装置本体2を制御する制御手段3とを備える。装置本体2は、プローブ4を備え、プローブ4は、被測定物に接触する測定子を先端側に有する棒状のスタイラス41と、スタイラス41の基端側を支持する支持機構42とを備える。支持機構42は、スタイラス41の位置を検出するプローブセンサ421を備え、スタイラス41を一定の範囲内で移動可能に支持する。制御手段3は、プローブセンサ421にて検出されるスタイラス41の位置を入力とし、測定子、及び被測定物の接触する位置を出力とする伝達関数に基づいて、測定値を算出する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
産業機械
【課題】使用する環境の温度変化や、経時変化などの影響があっても適切に空間精度補正をすることができる産業機械の提供。
【解決手段】産業機械としての三次元測定機1は、ガイド部212と、コラム221とで構成され、Y軸方向に沿って移動する移動機構と、コラム221の角度を検出する2軸角度計32と、移動機構を制御する制御装置4とを備える。制御装置4は、角度誤差取得部42と、パラメータ生成部43と、補正部44とを備える。角度誤差取得部42は、コラム221を移動させたときに2軸角度計32にて検出される角度に基づいて、コラム221の位置に対するコラム221の角度誤差を取得する。パラメータ生成部43は、角度誤差取得部42にて取得されるコラム221の角度誤差をコラム221の位置で積分することで真直度補正パラメータを生成する。補正部44は、パラメータ生成部43にて生成される真直度補正パラメータに基づいて、移動機構の運動誤差を補正する。
(もっと読む)
工作機械における工作物測定方法およびその装置
【課題】計測器を別途使用しなくても、工作物測定用の測定ヘッドが本来有している測定機能を有効利用して測定ヘッドの3次元オフセットを取得して、測定ヘッドで工作物を測定する工作物測定方法を提供する。
【解決手段】工作機械に取付けられた測定ヘッド10を所定角度旋回させて基準球30を第1の方向E1と第2の方向E2から測定することによって、基準球における中心点A1の座標を取得する。測定ヘッドが基準球の中心点を第1の方向から測定したときの測定ヘッドの第1の機械座標と、測定ヘッドが基準球の中心点を第2の方向から測定したときの測定ヘッドの第2の機械座標とに基づいて、測定ヘッドの3次元オフセットを取得する。その後、測定ヘッドの3次元オフセットを使用して、工作物を測定ヘッドで測定する。
(もっと読む)
筒状体形状測定装置および筒状体形状測定方法
【課題】筒状体の軸方向及び周方向の全面の外径と肉厚を同時に測定し、その内径および内外径中心線のずれである位置度を測定する装置及び方法を提供する。
【解決手段】筒状体形状測定装置10は、筒状体1の外面を軸方向および周方向に三次元座標を測定するための三次元測定用プローブと、この三次元測定用プローブと所定の距離を隔てて配置され、筒状体1の厚さを測定するための探触子と、この三次元測定用プローブおよび探触子を搭載したプローブユニット12を走査させる走査手段13,14と、走査手段13,14を制御して前記筒状体の軸方向および周方向にわたる外面を走査し、前記筒状体の周方向および軸方向の外径と肉厚とを計測し、この計測結果に基づいて前記筒状体の周方向および軸方向の内径と、前記筒状体の内外径中心線のずれである位置度を算出する三次元・厚さ測定器11を具備する。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
三次元測定機
【課題】測定箇所の測定データを適切に取得できて操作性も良い手動式の三次元測定機を提供する。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ2と、プローブ2を移動させる三次元測定機本体3と、三次元測定機本体3を制御する制御手段10とを備え、プローブ2が三次元測定機本体3を介して手動で移動されるものであって、外部からのトリガ指令T3をプローブ2及び三次元測定機本体3に外力を作用させずに入力させるマイク6を有し、制御手段10は、トリガ指令T3に基づいて測定データを取得する動機となるトリガ信号を生成する音声処理部101と、トリガ信号を音声処理部101から受け取ることによって測定データを取得するデータ取得部102とを備える。
(もっと読む)
三次元測定機の校正方法
【課題】接触式三次元測定機を容易に校正可能な三次元測定機の校正方法を提供する。
【解決手段】単一の基準球面1aにプローブ2を倣わせてその軌跡を測定データとして取得し、前記測定データを球状に座標変換する座標変換量とその球の半径を算出し、前記座標変換量から直角度誤差を校正し、前記球の半径から基準球面の半径を差し引くことで、プローブ先端球の半径を校正する。
(もっと読む)
機上計測装置のプローブ取り付け位置算出方法
【課題】回転軸を用いた機上計測において、各種演算により算出された機上計測装置の取り付けられた回転軸の回転中心軸とプローブの先端との距離を基準球計測の結果を基に補正を行う機上計測装置のプローブ取り付け位置算出方法を提供する。
【解決手段】基準球を計測することにより、算出したプローブ取り付け位置(X0,Z0)の精度を向上させる準備段階において、(X0,Z0)のX,Z値を各々―1nmずつずらし、ずらした座標を基に基準球計測プログラムを作成して一定角θ1,θ2での座標を求め所定の条件内であるか否か判断し、条件を満たす場合には、(X0,Z0)に総ずらし量を加えたものを真のプローブ取り付け位置とし、処理を終了し、条件を満たさない場合には、ずらす度に一定角θ1,θ2での座標から離れるか否か判断し、離れない場合には準備段階の最初へ移行し、離れる場合には異なる方向へずらす第2の準備段階へ移行する。
(もっと読む)
形状測定方法
【課題】高精度でなく安価な姿勢変更機構でも、被測定物を高精度に測定することができる形状測定方法を提供する。
【解決手段】被測定物Wを載置したテーブル14の姿勢を傾ける姿勢変更機構4を備え、プローブによって被測定物の形状を測定する形状測定方法。テーブル14の被測定物載置面14Aに3つの基準球21,22,23を互いに離間して配置し、この3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの姿勢傾き量を算出する。
(もっと読む)
微細接触力調整機構を有する接触式計測装置
【課題】空圧と永久磁石による接触力調整において、微細な接触力を自動的にかつ正確に調整することが可能な微細接触力調整機構を有する接触式計測装置を提供する。
【解決手段】工作機械を制御する数値制御装置8から電空レギュレータ40へ電圧の微調整指令を行って、電空レギュレータの空気圧を微調整し、その時のプローブ1bの変位と接触力f1との関係を同時に取得しパーソナルコンピュータ11に備わった記憶装置に格納する。数値制御装置8による電空レギュレータ40の制御は、数値制御装置の記憶装置に格納されたデータから、電空レギュレータ40に指令する電圧に変換し、数値制御装置8に接続された電空レギュレータ40の圧力の調整を行う。電空レギュレータ40を用いることにより、レギュレータ36により絞られた1次降圧された圧縮空気を電空レギュレータ40において再度絞って2次降圧する。
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 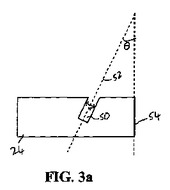 (もっと読む)
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 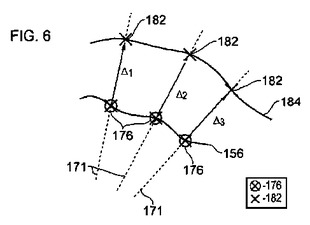 (もっと読む)
(もっと読む)
表面性状測定機
【課題】スタイラスの交換時期を適正に知らせることができる表面性状測定機を提供する。
【解決手段】操作キー51〜58によって入力されたしきい値を記憶するしきい値記憶部64と、スタイラス33のトレース方向の移動距離を検出するスタイラス移動距離検出器36と、このスタイラス移動距離検出器によって検出されたスタイラスの移動距離を累積記憶する累積移動距離記憶部65と、しきい値記憶部64に記憶されたしきい値と累積移動距離記憶部65に記憶された累積移動距離とを比較し、累積移動距離がしきい値を超えたときにスタイラスの交換を表示器41に表示する報知手段(制御手段70)とを備える。
(もっと読む)
座標測定システムに実行可能プログラムを提供する方法、システム、および記憶媒体
【課題】3次元座標測定システムのコントローラで使用するプログラムを顧客にネットワークを介して配信する方法を提供する。
【解決手段】顧客から実行可能プログラムの作成要求を受信するステップと、顧客のプログラム実行に係わる経験レベル等の情報を入力するステップとを具備する。作成される実行可能プログラムは3次元座標測定システムで実行される多数の測定ステップをオペレータに示すものである。実行可能プログラムはネットワークを介して顧客に配達される。
(もっと読む)
41 - 60 / 319
[ Back to top ]