
Fターム[2F062AA04]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 三次元 (319)
Fターム[2F062AA04]に分類される特許
141 - 160 / 319
レール移動型案内機構
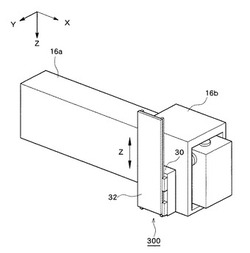
【課題】レール移動型案内機構を軽量化する。
【解決手段】固定部材30と、固定部材30に対して移動することによって固定部材30との相対的な位置をかえるスライダ32とを備える。固定部材30には、ガイドブロック34が設けられ、スライダ32にはスライダ32の移動軸方向に沿ってガイドブロック34より長く延設され、ガイドブロック34と摺動するように係合するガイドレール36を設ける。
(もっと読む)
位置測定装置

【課題】 簡単かつ正確に被測定面の位置を測定できる位置測定装置を提供する。
【解決手段】 測定基準面12aに取り付け可能な架台1に取り付けられた旋回台2の旋回角度測定手段2aと、首振りアーム3と、首振り角度測定手段3aと、首振りアーム3から導出される可撓性の線状部材3bと、導出長さ測定手段3cと、旋回角度、首振り角度および導出長さの各測定手段の出力値を入力とする制御部と、被測定面5上の三点にそれぞれ導出された線状部材3bの距離データと角度データとに基づいて、被測定面5の位置を算出する位置算出手段5aとを有する位置測定装置10において、首振りアーム3の基部3dと、この基部3dを左右から支持する左右の軸支板6a、6bと、基部3dと左右の軸支板6a、6bとを各々接触させることによって電気的に導通した位置を旋回角度測定手段2aによって計測して、首振りアーム3のセンター値を割り出す。
(もっと読む)
形状測定装置
【課題】光学素子の基準面測定と光学面測定を1つのプローブで測定する。
【解決手段】プローブハウジング4とプローブシャフト2の間に、プローブシャフト2の相対変位を測定するX1変位計6a、X2変位計6b等を設け、プローブシャフト2の並進変位と回転変位を測定する。また、プローブシャフト2に対して並進力と回転力を発生させるために、ヨーク3a、3b、磁性体3c、3dを有するX力発生機構、Y力発生機構を設ける。被測定物Wの光学面Waの測定は、Z変位計7の出力を用いて行い、基準面Wbの測定は、X1変位計6a、X2変位計6b等の出力を用いる。
(もっと読む)
ワイヤ式三次元座標測定機
【課題】簡易な構造で、被測定物の平面度や形状を測定するワイヤ式三次元座標測定機を提供するものである。
【解決手段】スタンド1の上部にリニアスケール4を取付けた水平アーム3を設け、このリニアスケール4上を水平に移動するリードヘッド30の先端にワイヤ8を接続し、水平アーム3の先端に、リニアスケール4から引出されたワイヤ8が通過する回転ガイド5と、これに回動自在に接続された角度ガイド6とからなるワイヤガイド器7を設け、前記回転ガイド5に角度ガイド6の回転角度を検出する中空エンコーダ33を設け、回転ガイド5と角度ガイド6とを回動自在に接続する軸30に、ワイヤ8の曲がり角度を検出するエンコーダ42を設けると共に、先端子10の座標を演算する座標演算器を設けて、被測定物12に接触させた先端子10の位置座標を演算するようにしたものである。
(もっと読む)
倣い測定装置
【課題】本発明の目的は、自律倣い測定の高精度化と高速化との両立を実現することのできる倣い測定装置を提供することにある。
【解決手段】倣いプローブ12による自律倣い測定中、倣いプローブ12の現在のチップ中心位置に対し過去のチップ中心位置の軌跡情報を保持している軌跡情報保持手段40と、該軌跡の近似直線方向を軌跡基準方向とする軌跡基準方向決定手段42と、該方向を進行方向に決定する進行方向決定手段44と、該進行方向に沿って倣いプローブ12が移動するように移動手段32を制御する移動制御手段46と、該進行方向に基づき被測定面30の法線方向を求める法線方向決定手段48と、を備えたことを特徴とする倣い測定装置10。
(もっと読む)
三次元形状測定用プローブ装置およびプローブの干渉検知方法
【課題】接触式プローブを用いた多関節アーム型三次元形状測定装置において、目視で確認できない部位における接触子の接触不良による誤測定を回避することができる三次元形状測定装置提供する。
【解決手段】接触式プローブは、接触子1aと接触子1aを除くプローブ構成部品1b、1cとが電気的に絶縁され、接触子1aを除くプローブ構成部品1b、1cと被測定対象物5との間に通電する導通チェック機構3を備えている。
(もっと読む)
被測定物の表裏面測定方法
【課題】基準球などを用いることなく、被測定物の表裏面を高精度にかつ効率的に測定できる被測定物の表裏面測定方法を提供する。
【解決手段】被測定物の第1測定面(表面)がプローブによって測定可能な姿勢に被測定物を設置する設置工程ST1と、この姿勢において、被測定物の輪郭形状および第1測定面を測定する第1輪郭形状測定工程ST2および第1測定面測定工程ST3と、被測定物を反転する反転工程ST4と、反転された姿勢において、被測定物の輪郭形状を測定する第2輪郭形状測定工程ST5と、第1,第2輪郭形状測定工程で得られた輪郭形状データを比較し、第2測定面において、第1測定面測定工程で測定した第1測定面の測定位置に対応する測定位置を求める測定位置算出工程ST6と、測定位置算出工程で求められた測定位置に沿って第2測定面の形状を測定する第2測定面測定工程ST7とを備える。
(もっと読む)
プローブの真直度測定方法
【課題】真直度測定用のセンサなどを別途用意しなくても、プローブの真直度を実際の使用環境の中で測定することができるプローブの真直度測定方法を提供する。
【解決手段】形状誤差が既知の測定基準面72を有する測定治具71を、測定基準面72がXYステージ2の移動方向に傾斜するように、XYステージ2の載置面2Aに載置する準備工程と、プローブのスタイラス14が測定基準面に一定圧で接触するように駆動用アクチュエータを制御しながらXYステージを所定距離移動させ、そのときのスタイラスの変位位置をプローブの変位検出器から測定する測定工程と、これによって得られたスタイラスの測定位置Zreal、計算によって得られるスタイラスの理論位置Znomおよび測定基準面の傾斜角度θから、スタイラスの真直誤差を求める演算工程と、を備える。
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 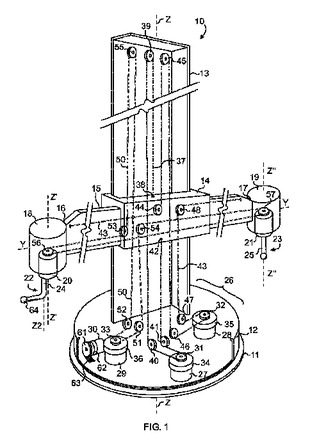 (もっと読む)
(もっと読む)
距離測定装置
【課題】
できるだけ長期間にわたって測定精度および信頼性が保証されている、高い測定精度を有するカプセル封入されたコンパクトな距離測定装置を提供する。
【解決手段】
測定方向Xに沿って延びる管(24)であって、該管が、前記縦ガイド(12)によって測定方向Xに平行に案内されるように前記第2の測定素子(20)に接続されており、前記ハウジング(11)の開口部(25)を通して封止するように引き出されており、前記連結ロッド(22、22.1、22.2、22.3)が前記管(24)の内部に延び、前記管(24)が、前記管(24)の内部における、前記測定方向Xに直交して進行する前記連結ロッド(22、22.1、22.2、22.3)の補正移動を可能にする管(24)を備えていることにより解決される。
(もっと読む)
形状測定方法
【課題】レンズの外形基準に対するレンズの光軸の傾き、偏心量の要望精度に対応できる
形状測定方法を提供する。
【解決手段】被測定物としてのレンズ4を3個の球状部3a,3b,3cを有する治具3に同軸状に設置し、測定機XY平面に対して中心軸wを所定の傾斜角度で傾斜させて中心軸wまわりに所定角度ずつ回転させ、各回転位置で、球状部3a,3b,3cとレンズ4の円筒面4aおよびその片側の面4a1,4bとをプローブ1により所定経路で走査してデータを取得し、各回転位置での球状部3a,3b,3cの中心位置座標値をデータより算出し、最小二乗法でフィッティングさせることにより、全回転位置でのレンズ4の測定データ群を球状部基準で中心軸wまわりの全周にわたって分布し、測定面の形状を求める。
(もっと読む)
超音波検査(UT)を三次元座標測定機(CMM)と統合するための方法及びシステム
【課題】機械構成要素を測定するのに使用する測定装置を組立てる方法を提供する。
【解決手段】本方法は、三次元座標測定機(CMM)を準備するステップを含む。本方法はまた、超音波検査(UT)機能及びCMM機能を組合せて検査プローブを形成するステップを含む。検査プローブは、該検査プローブがCMM機能を使用して機械構成要素の外部境界を測定しかつほぼ同時にUT機能を使用して該機械構成要素の内部境界を測定するようにCMM上に取付けられる。
(もっと読む)
形状測定装置、形状測定方法、及び形状測定プログラム
【課題】非球面ワークの測定から照合計算までに要する時間を短縮化した形状測定装置、形状測定方法、及び形状測定プログラムを提供する。
【解決手段】制御部41は、ワーク4の面における所定方向に亘る3次元測定により3次元測定値Miを取得する。続いて、制御部41は、ワーク4の設計関数にて特定されるワークモデルFを3次元測定値と照合させて、ワーク4の傾きを含む配置状態を推定する。次に、制御部41は、推定された配置状態に基づき対応測定経路Laiを推定する。続いて、制御部41は、推定された対応測定経路Laiに基づき対応測定経路Lai上の対応値Dxiを推定する。
(もっと読む)
三次元形状測定装置
【課題】接触式プローブ方式と非接触式プローブ方式の両方に対応し、被測定物によって簡単に切り替えることの可能な三次元形状測定装置を実現する。
【解決手段】接触式プローブ方式では、プローブ先端球109を被測定物110に接触させてZ軸アーム103によって倣い走査させ、第1、第2の基準ミラー102、111とプローブ軸ターゲットミラー114を用いて被測定物110の表面形状のデータを得る。非接触式プローブ方式においては、プローブ軸106及びプローブ軸ターゲットミラー114をZ軸アーム103から取り外して、第1、第2の基準ミラー102、111を用いた同じレーザ測長器によって被測定物110の表面形状のデータを得る。
(もっと読む)
3次元測定機用寸法標準器
【課題】 3次元測定機に簡単にセットすることができるとともに、3次元測定機の測定範囲を最も長い対角線長に近い測定長で高精度で測定することが可能な3次元測定機用寸法標準器を提供する。
【解決手段】 石英ガラスまたは単結晶石英によって形成されている細長い丸棒状のロッドの両端部に3次元測定機A1のプローブA6先端を接触させる基準測定面を有する不変鋼で形成された一対の基準部材7Bが固定されている棒状ゲージ2と、前記棒状ゲージ2を傾斜した上面で支持する支持体3から構成されており、前記支持体3を、3次元測定機A1の測定テーブルA2上に置かれたマスタブロックMの上面に取り付けて3次元測定機A1の指示誤差の測定を行う。
(もっと読む)
車体の二点の矯正座標点を計測するシステム
【課題】この種の計測システムに、本出願人が提案する発明がある。水準器を備えたゲージ棒と、ゲージ棒の両端に設けたジョイント部材で構成し、ジョイント部材に垂設した位置決めゲージと、一本〜数本の計測ゲージで構成し、計測ゲージで、車輌の歪みを計測する。一本のゲージ棒を基点として、一箇所〜二箇所の歪みを計測できるが、一本のケージ棒を介して、計測するので問題である。
【構成】車体の複数矯正座標点に支持した対の座標位置決め兼支持具と、各座標位置決め兼支持具に、垂下した各座標位置決めスケールと、各座標位置決めスケールに一端を、座標計測支持具に他端を、支持した対の本体スケールと、各本体スケールに、座標計測支持具の他端を支持する際に、スペーサを介在し、本体スケールの他端を、水平面に対して位相を変え、座標計測支持具に支持する構造である。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】接触子の形状が理想的な球ではない場合であっても、測定点を正確に算出可能な形状測定装置、その形状測定方法並びに形状測定プログラムを提供する。
【解決手段】擬似測定点を取得する擬似測定点取得部212と、各擬似測定点から被測定物表面へと向かう大凡の方向にガイドラインを生成するガイドライン生成部213と、接触子の表面形状を特定する接触子モデルの基準点を擬似測定点に一致させると共に測定時の接触子と接触子モデルとの姿勢を一致させて接触子モデルを配置する接触子モデル配置部214と、各ガイドラインと各配置された接触子モデルの表面とが交わる交点を取得する交点取得部215と、各ガイドライン上における交点の中から擬似測定点から最も離れた交点を測定点として取得する測定点取得部216とを備える。
(もっと読む)
座標測定機を校正するための方法
座標測定機を校正するために既知特性の基準測定対象が用意される。基準測定対象で多数の基準測定値が記録される。基準測定値と基準測定対象の既知特性とに基づいて校正データが判定され、校正データは少なくとも1つの多項式変換に基づいて非線形測定誤差を修正するように形成された第1数の多項式係数を含む。本発明の一態様によれば、第1数の多項式係数が反復法で僅かな数の第2数に減らされ、多数の対の多項式係数が形成され、一対の多項式係数の間の統計的依存度が規定された閾値よりも大きいとき、前記対の各一方の多項式係数が消去される。
(もっと読む)
構成部品の実測データを調査する方法および装置
【課題】光学走査に由来する、構成部品の実測データを調査する方法を改良する。
【解決手段】構成部品1の実測データ2を、構成部品の実測データを調査する仮想座標測定機の仮想測定スタイラスを生成する接触式座標測定機用測定プログラム24を用いて調査する。
(もっと読む)
携帯型計測装置
携帯型計測装置のための方法及びシステムが記載される。本発明の1実施形態は、第1のリンクと、第1の自由度で移動するように動作可能な第1の連結器によって第1のリンクと連結される第1のプローブと、第2の自由度で移動するように動作可能な第2の連結器によって第1のリンクと連結される第2のプローブと、第1の連結器の動作と関係付けられる第1のセンサ信号を出力するように動作可能な第1のセンサと、第2の連結器の動作と関係付けられる第2のセンサ信号を出力するように動作可能な第2のセンサとを有する装置である。また、実施形態は、第1及び第2のセンサと連絡するプロセッサであって、第1のセンサ信号及び第2のセンサ信号を受信し、且つ少なくとも部分的に第1のセンサ信号及び第2のセンサ信号に基づいて第1のプローブと第2のプローブとの間の距離を判断するように動作可能なプロセッサを有する。  (もっと読む)
(もっと読む)
141 - 160 / 319
[ Back to top ]