
Fターム[2F062AA04]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 三次元 (319)
Fターム[2F062AA04]に分類される特許
61 - 80 / 319
表面形状測定装置
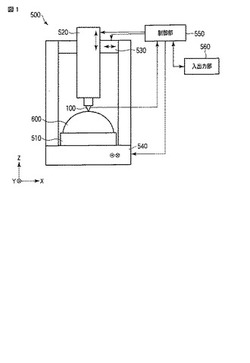
【課題】被測定物の表面形状を高い精度で測定し得る表面形状測定装置を提供する。
【解決手段】表面形状測定装置500は、被測定物600を支持する被測定物台510と、力感知部100と、力感知部100と被測定物600を互いに近づけるまたは遠ざけるために力感知部100と被測定物600を相対的にZ軸に沿って移動させるZ走査機構540と、Z軸に直交するX軸に沿って力感知部100と被測定物600を相対的に移動させるX走査機構520とを備えている。力感知部100は、被測定物600に近接されて被測定物600から力を受けるプローブを含み、このプローブが被測定物600から受ける力を感知する機能を有している。
(もっと読む)
三次元測定機

【課題】簡素な処理でプローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、プローブ21にて被測定物を測定する測定モードと、被測定物を測定することなくプローブ21を移動させる移動モードとを識別するモード識別部34と、電流値検出部33にて検出される電流値と、モード識別部34による識別結果に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部35とを備える。
(もっと読む)
三次元測定機
【課題】プローブや移動機構と、被測定物との衝突を判定するための適切な閾値を設定することができ、プローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、電流値検出部33にて検出される電流値と、移動機構22にてプローブ21を移動させる速度の目標値に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部34とを備え、速度の目標値と、閾値との関係は比例関係である。
(もっと読む)
仮想表面によって測定過程を制御する方法
本発明は、測定対象(12)を計測する座標測定機(46)の測定過程を制御する方法(10)であって、前記座標測定機(46)が制御装置(64)と探触ピン(18)を備えたプローブ(60)とを有し、前記探触ピン(18)と前記測定対象(12)の表面(14)との間の相対運動が前記制御装置(64)によって制御されるものに関する。さらに、前記表面(14)は測定対象表面(13)に一致した少なくとも1つの実際部分(24)と少なくとも1つの仮想部分(26)とを有する。本発明はさらに、当該座標測定機とコンピュータプログラムとに関する。
(もっと読む)
基準器、及び座標測定機
【課題】定盤の自由な位置に設置することができ、座標測定機の製造コストを低減させることができる基準器の提供。
【解決手段】基準器は、三次元測定機に測定される基準器本体と、基準器本体を支持する台座4とを備える。台座4は、定盤11の平面11Aに当接する当接面421を有する円盤状に形成されている。当接面421には、断面円環状の凹部422が形成されるとともに、凹部422には、空気を吸気するための吸気孔423が形成されている。また、台座4は、吸気孔423に連通する吸気用流路43を有し、吸気用流路43を介して吸気孔423から空気が吸気されることで定盤11に対して吸着することができる。
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 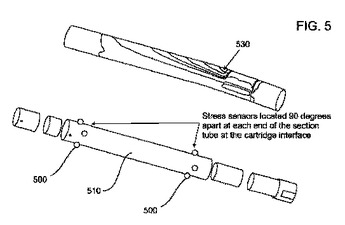 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 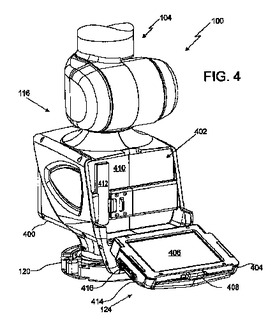 (もっと読む)
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。 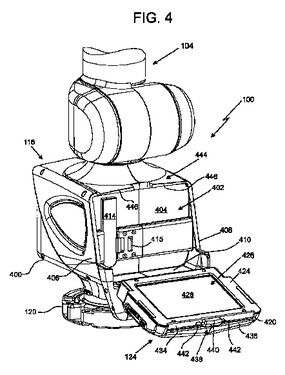 (もっと読む)
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 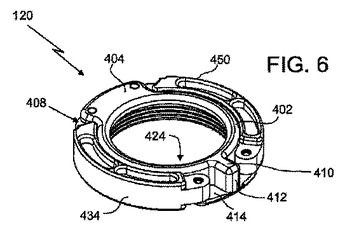 (もっと読む)
(もっと読む)
多機能座標測定機
可搬型の関節アーム座標測定機(AACMM)が、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能なアーム部であって、接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型のAACMMを実装することが、データが送信される送信経路を判定することによって、データが受信される送信元デバイスを特定するステップであって、送信元デバイスが、AACMMの第1の端部に取外し可能なように装着される、ステップと、送信元デバイスの特定情報に基づいてデータのデータタイプを判定するステップと、データタイプに応じてデータに対してアクションを実行するステップと、アクションを実行した結果を送信先デバイスに出力するステップとを含む。 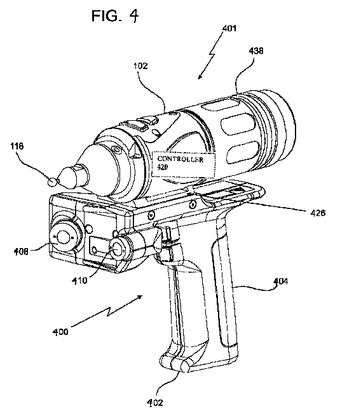 (もっと読む)
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 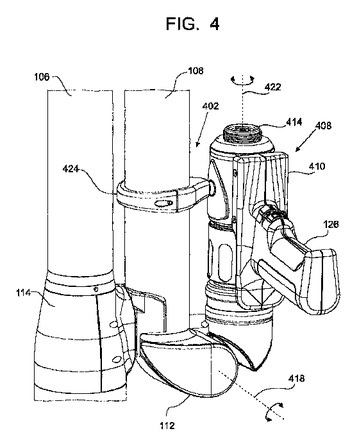 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 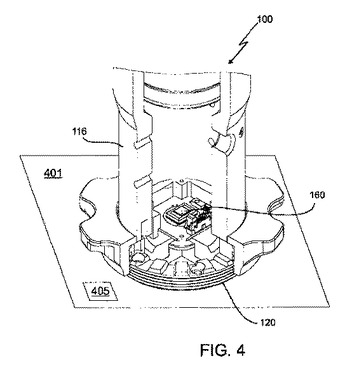 (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。 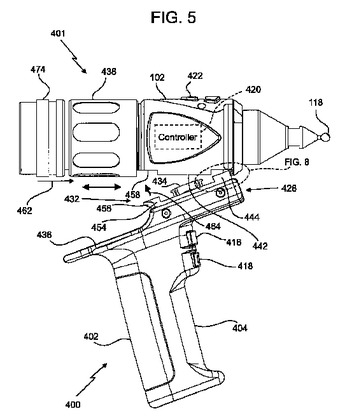 (もっと読む)
(もっと読む)
座標測定デバイスのためのカウンタバランス
可搬型の関節アーム座標測定デバイスが、提供される。座標測定デバイスは、基部と、少なくとも1つのアームセグメントを有する関節アーム部とを含む。付勢部材が、基部に第1の端部で結合され、関節アーム部に第2の端部で結合される。付勢部材の第1の端部は、第1の位置と第2の位置の間を動くことができる。アジャスタが、基部と付勢部材の間に結合される。アジャスタは、付勢部材の第1の端部を第1の位置から第2の位置に動かすために結合される。  (もっと読む)
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 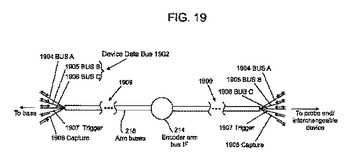 (もっと読む)
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。 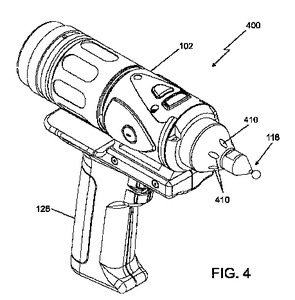 (もっと読む)
(もっと読む)
駆動装置および測定装置
【課題】鉛直方向への駆動精度を向上させる
【解決手段】Z軸スピンドル19は、エアベアリング22−1および22−2により鉛直方向への移動がガイドされる。シャフトモータ23は、鉛直方向に延びるように配置されるシャフト25と、シャフト25に対して非接触で、シャフト25に沿った方向にZ軸スピンドル19を駆動させる駆動力を発生するスライダ26から構成される。また、エアシリンダ29は、シャフトモータ23のシャフト25によりZ軸スピンドル19の重量を支持し、Z軸スピンドル19の重量に見合う押上力を、Z軸スピンドル19の移動に応じて発生する。本発明は、例えば、プローブにより形状を測定する三次元測定装置に適用できる。
(もっと読む)
眼鏡枠形状測定装置
【課題】精度良くレンズ枠の形状を測定する。
【解決手段】針状の測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸を持つ測定子保持ユニットであって、測定子281の先端方向に測定子軸を移動可能に保持し、測定子保持ユニットと、XY移動手段と、測定子の先端のXY方向を変える回転手段と、測定子のXY位置検知手段と、XY移動手段及び回転手段の駆動を制御する制御手段と、測定子保持ユニットのXY方向の位置情報、回転手段の回転情報及びXY位置検知手段の検知情報に基づいてレンズ枠FWの動径情報を求める演算手段とを備え、制御手段はレンズ枠FWの測定途中では、レンズ枠FWの測定済みの動径情報に基づいて測定子保持ユニットを移動させるXY位置を決定してXY移動手段の駆動を制御する。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームのレンズ枠の形状を精度良く測定し、高カーブフレームの測定時に測定子がレンズ枠の溝から外れ難くする。
【解決手段】針状の先端形状を持つ測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸282を持ち、測定子軸282を測定子281の先端方向に傾斜可能に保持すると共に、測定子軸282をZ方向に移動可能に保持する測定子保持ユニットと、Z移動手段と、測定子のZ位置を検知するZ位置検知手段と、Z移動ユニットの駆動を制御する制御手段と、測定子保持ユニットのZ方向の位置情報及びZ位置検知手段の検知情報に基づいてレンズ枠の動径形状に対応するZ方向の形状を求める演算手段とを備える。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
61 - 80 / 319
[ Back to top ]