
Fターム[2F062AA04]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 三次元 (319)
Fターム[2F062AA04]に分類される特許
101 - 120 / 319
画像プローブの校正方法および形状測定機
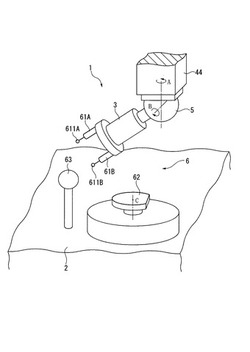
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
三次元形状測定装置用プローブ及び三次元形状測定装置

【課題】鉛直面及び水平面いずれについても小さい測定力による測定を可能とする。
【解決手段】三次元形状測定装置用プローブ1は、取付用部材2、揺動部3、連結機構、アーム取付部120、及び板バネ9A,9B、及び取付用部材2を備える。アーム取付部120にはスタイラス121が下端に配置されたアーム122が垂下して取り付けられている。アーム取付部120は板バネ9A,9Bを介して揺動部3に保持されている。揺動部3は連結機構によって水平方向に傾動可能に取付用部材2に連結されている。揺動部3の可動側磁石と取付用部材2の固定側磁石との間の磁気的吸引力によりアーム122が鉛直方向に延びる中立位置に揺動部3を復元させる復元力が作用する。鉛直面測定時の測定力は可動側磁石との間の固定側磁石の磁気的吸引力により得られる。水平面測定時の測定力は板バネ9A,9Bが鉛直方向に撓むことで得られる。
(もっと読む)
三次元測定装置
【課題】 ある点の測定後のスタイラス(測定ヘッド)のセンター(原位置)への復帰を瞬時に自動的に正確に行える三次元測定装置を提供すること。
【解決手段】 スタイラス(測定ヘッド)を原位置に復帰せしめるべくプローブユニット内に配設される、スタイラスと同軸上に延在するセンターピンと同一部材から製造されるとともにセンターピンと平行に延在する一対のストッパーピンを挟持して前記センターピンの外径と同一間隔を規定する、相対向し水平移動する一対のリミッタと、該リミッタをその背面から押圧付勢する圧縮ばねからなるセンターピンX方向復帰機構およびY方向復帰機構をZ軸方向に二層に配設したセンターピン復帰機構を有してなる三次元測定装置。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
三次元測定機
【課題】精度よく測定しなければならない小さい領域と、精度よく測定しなくてもよい大きな領域とが混在する大きな被測定物を適切に測定することができる安価な三次元測定機の提供。
【解決手段】三次元測定機1は、三次元測定機本体2と、制御装置3とを備える。三次元測定機本体2は、測定子を有するプローブ4と、プローブ4を駆動する駆動機構5とを備える。プローブ4は、測定子を駆動する駆動部43を備える。制御装置3は、第1測定部321と、第2測定部322とを備える。第1測定部321は、駆動部43にて駆動される測定子の移動量を測定する。第2測定部322は、プローブ4の移動量を測定する。また、第2測定部322による測定精度は、第1測定部321による測定精度より低い。
(もっと読む)
誤差補正方法及びこれを用いた部品測定方法
【課題】本発明は、測定装置のコストを低減し、且つ測定精度を保障する誤差補正方法及びこれを用いた部品測定方法を提供する。
【解決手段】前記誤差補正方法は、プローブ及びガイドを備える測定装置を提供するステップと、ガイドの真直度誤差を測定して補正するステップと、プローブの取付傾斜角をフィッティングするステップと、プローブの形状誤差を計算するステップと、系統誤差補正プログラムを生成するステップと、を含む。前記部品測定方法は、前記誤差補正方法を通して系統誤差補正プログラムを生成するステップと、曲面又は曲線を有する部品を提供するステップと、前記測定装置を使用して、部品の曲面又は曲線を測定するステップと、ガイドの真直度誤差を測定して補正するステップと、プローブの取付傾斜角による誤差を補正するステップと、プローブの形状誤差を補正するステップと、プログラムにより測定誤差を生成するステップと、を含む。
(もっと読む)
補正ボール径算出方法および形状測定装置
【課題】解析精度を向上させることができる補正ボール径を算出できる補正ボール径算出方法および形状測定装置を提供すること。
【解決手段】本発明によれば、基準ゲージを回転させながら該基準ゲージを測定することにより補正ボール径を算出する。そのため、基準ゲージを回転させながら測定することにより生じる誤差を含んだ補正ボール径を算出することができる。また、基準ゲージの複数の高さ位置を測定することにより各高さ位置毎に補正ボール径を算出する。そのため、測定する高さ位置に応じて生じる誤差を含んだ補正ボール径を各高さ位置毎に算出することができる。従って、被測定物Wを回転させながら測定した際に、これらの誤差を含んだ補正ボール径を用いて被測定物Wの形状等を解析することで、被測定物Wの形状等を高精度に解析することができる。
(もっと読む)
微小焦点距離コリメーションに基づくマイクロキャビティ測定法および検出装置
本願発明は、1つのマイクロキャビティ測定法、および微小焦点距離コリメーションに基づく2種類の検出装置を含み、不規則なマイクロキャビティ、特に"サブマクロ"なマイクロキャビティの測定に使用することができる。本願発明においては、微小焦点距離を有する円筒レンズまたは球面レンズがファイバプローブと組み合わされて点光源の平行光結像光学システムを形成し、ファイバプローブの2次元または3次元の動きを超高感度で像の変化に変換する。本願発明は、微小測定力、高アスペクト比、および小型化の容易さ等の利点のみならず、高検出分解能、検出システムの単純な構造、および高速測定といった利点も有する。 (もっと読む)
工作機械の接触検出装置およびスタイラスの先端接触子の製造方法
【課題】先端接触子の呼び半径とスタイラスの実際の移動距離とによって、ワークの寸法計測を正確に行うことができる接触検出装置およびスタイラスの先端接触子の製造方法を提供する。
【解決手段】スタイラス2の先端接触子21の実際の半径をRaとしたとき、先端接触子21の呼び半径Rnに対して、動作遅れ分として、先端接触子21がワーク110に接触した位置から可動接点11,12,13のいずれかが対応する鋼球31と32,33と34,35と36との接触から離れる位置までのスタイラス2の追加移動距離dを足したRa=Rn+dの大きさにする。これにより、先端接触子21がワーク110に接触してから追加移動距離dだけスタイラス2をワーク110側に移動させることができるので、スタイラス2の移動距離と先端接触子21の呼び半径とを足すと、実際の移動距離と同じにすることができ、誤差を解消できる。
(もっと読む)
支持用部品の取付位置測定具および取付位置測定方法
【課題】支持用部品の取付誤差が大きいS/A部品が次工程に流出することを確実に防止するべく、現状の検査方法の変更を最低限に抑えつつ、支持用部品の取付位置を、容易に短時間で高精度に測定することができる支持用部品の取付位置測定具および取付位置測定方法を提供する。
【解決手段】揺動可能、かつ、その揺動方向が変更可能に支持されるリンク部材11とリンク部材11の変位量を検出する変位計6を備える測定具本体2と、ナット孔50aの位置を代替して示す測定孔3bが形成されるアタッチメント部材3と、からなり、さらにリンク部材11には、プローブ12および検出部13が固設され、プローブ12が測定面3cに当接するときの球面部12aの変位量を、球面部13aの任意の一軸方向に対する変位量として変位計6により測定し、測定面3cの位置を検出して、ナット孔50aの取付位置を検出する取付位置測定具1。
(もっと読む)
形状測定方法及び測定機能を有する機械
【課題】テーブルに固定されているワークの測定基準面が傾いている場合でもワークの形状を精度良く測定することができ、測定作業を簡単に行うことができる形状測定方法及び測定機能を有する機械を提供する。
【解決手段】測定ヘッド9がワーク7に対してアプローチする複数の測定動作方向を画面に表示するステップと、複数の測定動作方向のうちからワーク7の測定基準面2にアプローチするいずれか一つの測定動作方向を選択するステップと、ワーク7の測定基準面2上の3点の座標値を選択された測定動作方向へアプローチさせて測定するステップと、測定した3点の座標値に基づき測定基準面2を装置1の主軸3の軸線CLに対して垂直に向けるのに必要とされる回転送り軸の割出し角度を演算するステップとを含み、ワーク7の形状を測定する。
(もっと読む)
プローブのアライメント調整方法および形状測定機
【課題】作業者の熟練度に左右されることなく、プローブの角度を能率的かつ高精度に調整することができるプローブのアライメント調整方法および形状測定機を提供。
【解決手段】軸部の先端に接触部を有するプローブと被測定物とを相対移動させるとともに、その相対移動方向に対して直交しかつ軸部と交差する方向からプローブの移動軌跡画像を撮像する工程ST2と、撮像されたプローブの移動軌跡画像から相対移動方向を示す基準直線L1および軸部の傾きを示すプローブ軸線L2を抽出する工程ST3と、抽出された基準直線L1に対するプローブ軸線L2の傾きを演算して求める工程ST4と、求められたプローブ軸線L2の傾きに基づいてプローブの傾きを調整する工程ST6とを備える。
(もっと読む)
表面性状測定装置、その接触子モデル生成方法、及びプログラム
【課題】高精度で3次元接触子モデルを生成可能な表面性状測定装置、その接触子モデル生成方法、及びプログラムを提供する。
【解決手段】表面性状測定装置は、被測定物に先端が接触可能な接触子24と、接触子24を互いにX軸、Y軸、Z軸に沿って移動させる制御部41とを備える。制御部41は、接触子24を被測定物の表面に倣うように駆動すると共に接触子24の先端位置を疑似測定点Piとして取得する。制御部41は、基準ワーク4を接触子24で倣い測定して3次元接触子モデルM2を算出する。制御部41は、接触子24を、Z軸を中心として回転駆動する。制御部41は、回転駆動される接触子24の複数の回転位置のそれぞれにおいて、接触子24をX軸方向及びZ軸方向に沿って移動させて基準ワーク4を倣い測定して疑似測定点Piを取得し、取得された疑似測定点Piに基づいて3次元接触子モデルM2を算出する。
(もっと読む)
三次元測定機
【課題】測定条件を変更した場合であってもプローブの移動量を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、一定の範囲内で移動可能に構成される測定子を有するプローブと、プローブを移動させる移動機構と、移動機構を制御する制御装置とを備える。制御装置は、移動機構の移動量、及びプローブの移動量に基づいて測定子の位置を算出する測定値算出部53を備える。測定値算出部53は、被測定物を測定するときの測定条件に基づいて、プローブの移動量を補正するための補正パラメータを算出する補正パラメータ算出部531と、補正パラメータに基づいて、プローブの移動量を補正する補正部532と、移動機構の移動量と、補正部532にて補正されたプローブの移動量とを合成することで測定子の位置を算出する移動量合成部533とを備える。
(もっと読む)
接触式プローブ
【課題】形状測定に用いる接触式プローブにおいて、自重を補償して接触力を小さくして小型化を図るとともに測定精度を向上させ、さらに、先端球の交換を簡便に行うことができる接触式プローブを提供する。
【解決手段】3次元的に移動可能な移動部材103と、前記移動部材に対して重力の方向に移動可能に設けられたプローブ102と、前記移動部材103に支点を取り付けた天秤111またはプーリー118とを、有している。前記天秤またはプーリーの一端部にプローブ102を吊下げ、他端部には、バランス重り114を連結し、ばね115を前記バランス重りと移動部材との間に設けたことを特徴とする。このように天秤111を介してバランス重り114を設けることにより、バランス重りがプローブにかかる重力のほとんどを受けるので、ばね115が受け持つ力が非常に少なくなる。
(もっと読む)
三次元測定機
【課題】補正パラメータの算出にかかる時間を短縮することができ、測定精度を向上させることができる三次元測定機の提供。
【解決手段】三次元測定機は、測定子211Aを有するプローブ21と、駆動機構と、補正パラメータ算出装置とを備える。補正パラメータ算出装置は、測定子211Aの回転変位を拘束することなく測定子211Aの並進変位を拘束する拘束手段6と、プローブ21の移動量が0となる位置を基準位置として設定する基準位置設定部と、拘束手段6にて基準位置に測定子211Aを拘束した状態でプローブ21を複数の測定点に移動させて各測定点における基準位置からのプローブ21の移動量、及び駆動機構の移動量を取得する測定点情報取得部とを備え、測定点情報取得部にて取得される情報に基づいて、プローブ21の座標系を補正するための補正パラメータを算出する。
(もっと読む)
ホイールアライメント計測装置
【課題】簡素な構成にすることにより、軽量化を図ると共に、車両への設置自由度を高くすることができるホイールアライメント計測装置を提供する。
【解決手段】車体側取付部31に対してX軸周りに回転可能に支持される門形回転部材33と、門形回転部材33に対してY軸周りに回転可能に支持されるシリンダ部材41aと、このシリンダ部材41aに対してZ軸方向に変位するロッド41bとを有する伸縮機構部材41と、伸縮機構部材41に対してZ軸周りに回転可能に支持される枠状回転部材52と、枠状回転部材52に対してX軸周りに回転可能に支持され、ホイール4に装着されるホイール取付部59をその回転軸周りに回転可能に支持する回転部材55と、計測された各部材33,51,55,41aの回転角度及びロッド41bの変位に基づいて、ホイール4のX軸,Y軸,Z軸方向の変位量、トー角度変化量、キャンバ角度変化量を演算する演算器14とを備える。
(もっと読む)
形状測定プローブ
【課題】クリーンな環境以外の環境でも使用できるとともに、接触圧を小さくできる形状測定プローブを提供する。
【解決手段】接触子3を先端に有し、本体13に対し上下に移動可能なスライダ5と、本体とスライダとに接続され、スライダに上向き弾性力を作用させる弾性体7と、本体に設けられた第1磁力作用部9と、第1磁力作用部と上下方向に対向するようにスライダに設けられた第2磁力作用部11と、を備える。第1磁力作用部と第2磁力作用部とは互いに磁力を作用させることで、スライダに下向き磁力が付与されるようになっている。接触子が被測定物1に接触することでスライダが押し戻されると、上向き弾性力が減少し、下向き磁力も減少する。
(もっと読む)
三次元形状測定装置
【課題】三次元形状測定装置において、単一の位置検出器で複数の複数の測定ミラーの変位を測定可能とする。
【解決手段】互いに平行なレーザービームが偏光ビームスプリッタ204の偏光面Eの異なる位置に入射する。一方のレーザービームは偏光面で2つに分岐して第1の測定ミラー4と参照ミラー6に入射する。他方のレーザービームは偏光面で2つに分岐して測定ミラー5と参照ミラー6に入射する。偏光ビームスプリッタ204と測定ミラー210,211の間には、測定ミラー210に向かうレーザービームを透過させ、測定ミラー211に向かうレーザービームを反射される部分反射ミラー214が配置されている。測定ミラー4,5と参照ミラー6で反射されたレーザービームの干渉から測定ミラー4,5の参照ミラー6に対する相対位置を算出する。
(もっと読む)
形状測定装置
【課題】貫通孔を有するワークを、貫通孔が所定軸方向に平行となるように、短時間で載置可能に構成された形状測定装置を提供する。
【解決手段】形状測定装置は、貫通孔12aを有するワーク12を載置可能に構成され且つX軸及びY軸に回転可能に構成された回転テーブル13a、貫通孔12aの一方側からZ軸に平行に光を照射する光源13b、貫通孔12aの他方側に配置され且つ貫通孔12aを通過した光源13bからの光を受光してその受光した光に基づく輝度を測定するCCDカメラ18a、回転テーブル13aによるワーク12の回転角度をCCDカメラ18aにて測定された輝度に基づき制御する制御部35を備える。制御部35は、回転テーブル13aによりワーク12を所定角度ずつ回転させる毎に、CCDカメラ18aにより輝度を測定させ、その輝度が最大となる角度に回転テーブル13aの回転角度を設定する。
(もっと読む)
101 - 120 / 319
[ Back to top ]