
Fターム[2F062AA04]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911) | 三次元 (319)
Fターム[2F062AA04]に分類される特許
21 - 40 / 319
接触式プローブおよび形状測定装置
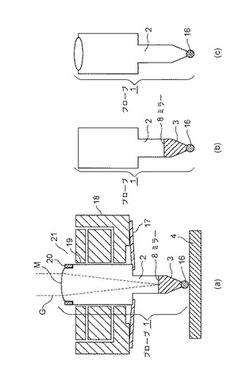
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
計測装置

【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
位置測定装置、位置測定装置を用いた形状測定装置及び位置測定方法、並びに位置測定方法を用いた形状測定方法
【課題】測定対象物の位置測定装置、形状測定装置、位置測定方法、及び形状測定方法を提供する。
【解決手段】位置測定装置10は、支持部材14と、支持部材14に上端部が固定され自由状態で垂直配置された光ファイバー11と、光ファイバー11の下端部に設けられた探触子12と、光ファイバー11の上下方向中間位置にあって光ファイバー11の撓みを検知する光学振れ検知機構15と、測定対象物23を載せてX軸、Y軸、Z軸方向に測定対象物23を移動させるXYZステージ25と、光学振れ検知機構15及びXYZステージ25の制御部26とを有し、光ファイバー11は、光ファイバー11を揺らす振動手段30を介して支持部材14に取付けられ、探触子12がXYZテーブル25に載った測定対象物23に当接した場合の光ファイバー11の撓み量を光学振れ検知機構15で検知し、測定対象物23の特定部位の座標を検知する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
三次元座標測定機簡易検査用ゲージ
【課題】JIS B 7440−2に関する三次元座標測定機の寸法検査(目盛校正)の簡易検査と同時にJISB 7440−5に関するマルチスタイラスの簡易検査およびそれぞれのスタイラスまたは方向性の相関の評価も行える三次元座標測定機簡易検査用ゲージを提供する。
【解決手段】三次元座標測定機簡易検査用ゲージ1は、基台3と、前記基台3上に設けられる半球状の本体4と、それぞれ一方の端部に保持具6を介して球体7が取り付けられ、もう一方の端部が前記本体4に固定される複数本のシャフト5からなり、該複数本のシャフト5(5−1〜5−9)のうち、1本のシャフト5−9は前記本体の極から鉛直方向に延びるように取り付けられ、残りのシャフト5−1〜5−8は平面視したときに隣のシャフトと一定の角度をなすように且つ斜め上方向に延びるように取り付けられている。
(もっと読む)
ガイド機構および3次元測定機
【課題】基準面側の荷重が変化した場合にも、基準面側のエアベアリングとガイドとの間の隙間を適正な所定値に保つことができるガイド機構およびそのガイド機構を有する3次元測定機を提供する。
【解決手段】第1の側に基準面を有するガイドと、前記基準面に沿ってスライド可能に前記ガイドに設けられる被案内部材と、前記ガイドの前記基準面との間に第1の隙間を有するように前記基準面を押圧し、前記被案内部材に設けられる基準側案内部材と、前記基準面と反対側の前記ガイドの第2の側面との間に第2の隙間を有するように前記第2の側面を与圧し、前記被案内部材に設けられる与圧案内部材と、を有し、前記第1の隙間が所定値になるように、前記予圧との位置が前記被案内部材に対して上下動するように設けられる前記押圧との相対関係が調整可能であることを特徴とするガイド機構である。
(もっと読む)
形状測定装置及び方法
【課題】 プローブによって、垂直へ切り立った壁面や穴の内面であっても、安定して接触力を制御し、高速な形状計測を行うこと。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面と移動手段の方向の関係を推定する。その結果、被測定面と垂直に近い状態であると判断された方向の移動手段のみによって、プローブの接触力制御を行うこと。
(もっと読む)
3次元測定機検証用長尺ゲージ
【課題】 構造が簡単で容易に製造することができ、且つ、プローブ先端の向きによる測定誤差の検証にも使用することができる、高精度な3次元測定機検証用長尺ゲージを提供する。
【解決手段】 3次元測定機のプローブが当接する基準測定面となる基準孔1Bが、上面と下面間を貫通して長手方向に沿って複数配列されている横断面矩形状の長尺なゲージ本体1Aと、前記ゲージ本体の下面とこれに直角な一方の側面に突設された複数の支持脚1aとを備えている。これらの支持脚は、前記下面と前記一方の側面のそれぞれの長手方向両端近傍位置と中央位置に、扁平な2等辺3角形の頂点となる配置で突設され、ゲージ本体は、これらの下面または一方の側面の何れかの支持脚で3次元測定機の測定テーブル面に支持される。
(もっと読む)
幾何誤差計測システム
【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
ワーク寸法計測装置及びワーク寸法計測方法
【課題】計測精度の向上を実現したうえで、寸法計測から計測後の検査記録作成までの作業コストの低減及び作業時間の短縮を実現でき、平坦度や捻れ等の三次元データをも得ることが可能であるワーク寸法計測装置及びワーク寸法計測方法を提供する。
【解決手段】セグメントWの寸法を計測するワーク寸法計測装置1であって、多関節アーム12を具備して、アーム12の先端に有する探触子11をセグメントWに接触させることで三次元座標値を得る複数の測定機10と、複数の測定機10の相対位置関係を校正する作業及び該複数の測定機10で得られた各三次元座標値に基づいてセグメントWの寸法を自動算出する作業を行う校正演算手段21と、校正演算手段21からの校正結果及び演算結果に基づいてセグメントWの寸法計測結果を評価する計測評価手段22と、計測評価手段22からの計測結果を検査記録にまとめて出力するデータ管理手段31を備えている。
(もっと読む)
載置台、形状測定装置、及び形状測定方法
【課題】予め算出した補正テーブルを変更することなく回転軸の位置補正を簡便に行うことができる、載置台、形状測定装置、及び形状測定方法を提供する。
【解決手段】被検物を載置する載置面が少なくとも1軸を中心として回転可能な載置部と、載置部を支持するベース部と、ベース部に固定されており、載置面の位置を規定する基準部と、を備える載置台である。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
座標測定用ヘッドユニット及び座標測定機
【課題】小型、安価で、高速の高精度測定が可能であり、工作機械における機上測定や搬送ラインでのインサイト測定が容易な、座標測定用ヘッドユニットを提供する。
【解決手段】座標測定用ヘッドユニット10において、コンピュータ数値制御によりプローブ12を互いに直交する複数の駆動軸に沿って移動させ、測定対象に当接させて測定対象の寸法を計測するための駆動手段(X軸駆動部14、Y軸駆動部16、Z軸駆動部18)と、該駆動手段14、16、18を収めるための一体化された筐体13と、該筐体13のいずれかの側面に設けられた、前記駆動手段14、16、18のいずれか一つを支持体(ベース30に固定されたスタンド32上のサポート34)に取付けるための取付手段(取付面20)と、を備える。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
三次元測定機の校正方法および校正治具
【課題】回転テーブル座標系の登録を効率よく行えるとともに高精度が確保できる三次元測定機の校正方法および校正治具を提供すること。
【解決手段】 回転テーブル50の座標系を登録するために、少なくとも3つの角度位置で回転テーブル50の表面の基準点の座標位置を測定する。測定には、接触部61として3つの同径の球体65を有し、支持部62として支柱64および基台63を有し、プローブ17の先端球17Aに対して3つの接点で同時に接触する校正治具60を用いる。測定手順として、回転テーブル50の表面に校正治具60を設置し、プローブ17を校正治具60に近接させ、プローブ17の先端球17Aが3つの球体65と同時に接触した状態での座標位置を読み取る。
(もっと読む)
測定装置
【課題】測定装置に関するエラーログを容易に取得可能な測定装置を提供する。
【解決手段】三次元測定機(測定装置)は、被測定対象に対して相対移動可能な測定子、および測定子を移動させる移動機構を有する本体2と、本体2の移動機構の駆動を制御するモーションコントローラー3と、を備える。モーションコントローラー3は、時刻を計測するRTC31と、本体2のエラーを検出して、RTC31エラー検出時刻を取得し、検出したエラーに基づいたエラーデータと、エラー検出時刻とを関連付けたエラーログ321を生成するエラー検出部33と、エラーログが記録される記録部32と、を備えた。
(もっと読む)
産業機械
【課題】エアー放出量を低減して省エネルギー化を図れる産業機械を提供する。
【解決手段】三次元測定機1(産業機械)は、エアーを供給するエアー供給部7と、エアー供給部7から供給されるエアーにより駆動される駆動機構25と、エアー供給部7から駆動機構25にエアーを導入するエアーレギュレータセット内に設けられ、エアーレギュレータセット内の空気供給路を開閉する電磁弁と、駆動機構25が駆動停止してからの時間が予め設定された設定時間になると、電磁弁を制御して、空気供給路を閉塞させるモーションコントローラー3と、を具備した。
(もっと読む)
三次元測定機の測定データ補正方法および三次元測定機
【課題】プローブ交換が行われても、測定データを適正に補正することができる三次元測定機の測定データ補正方法および三次元測定機を提供。
【解決手段】スピンドルに異なる重量を付加したときに三次元移動機構に発生する幾何学誤差を測定する幾何学誤差測定工程と、異なる重量毎に測定された三次元移動機構に発生する幾何学誤差を補正するための補正パラメータを記憶手段に記憶させる補正パラメータ記憶工程と、スピンドルに装着されたプローブの重量情報を入力する重量情報入力工程(ST11)と、入力されたプローブの重量情報に対応する補正パラメータを記憶手段から読み出し(ST12)、この補正パラメータで測定データを補正する補正工程(ST13)とを備える。
(もっと読む)
三次元座標測定機用ゲージ及び三次元座標測定機の精度評価方法
【課題】より高精度、より簡便に構成可能な三次元座標測定機ゲージを提供するとともに、当該三次元座標測定機ゲージを用いた精度評価方法を提供する。
【解決手段】 基板3の表面に固定された第1の球体4及び第2の球体5と、前記基板3の表面から突出して設けられた第1の柱7上に固定された第3の球体6と、を備えることにより三次元座標測定機を精度評価するための三次元座標測定機ゲージ1を構成する。
(もっと読む)
測定装置
【課題】座標読取値の信頼性の向上、およびラッチ処理の高速化を実現可能な測定装置を提供する。
【解決手段】三次元測定機(測定装置)は、被測定対象物に対して接触可能な測定子211、および測定子211の被測定対象物への接触を検出してタッチ信号を出力する接触検出センサー212を有するプローブ21と、プローブ21を互いに直交する3軸方向に沿って移動させる移動機構22と、プローブ21の位置座標を検出して座標検出信号を出力するスケールセンサー25X,25Y,25Zと、タッチ信号をカウントするタッチカウンタ281、および座標検出信号をカウントするスケールカウンタ282が組み込まれた集積回路28を有する制御回路基板26と、タッチカウンタの値、およびスケールカウンタの値を同タイミングでラッチするラッチ制御部29と、を具備した。
(もっと読む)
21 - 40 / 319
[ Back to top ]