
Fターム[2F063CC04]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 補償、補正、調整、調節の手段、手法 (111) | 電気磁気系によるもの (72) | 電磁誘導コイル、インダクター (22)
Fターム[2F063CC04]に分類される特許
1 - 20 / 22
歪み相殺を備えた磁界発生器パッチ
【課題】磁界発生器を提供する。
【解決手段】磁界発生器は、基材、主発生器コイル、少なくとも1つの磁界センサ、少なくとも1つのシムコイル、ドライバー回路及び補正回路を含む。主発生器コイル、磁界センサ、及びシムコイルは、全て基材上に配置されている。ドライバー回路は、選択された周波数にて駆動電流を使用して主発生器コイルを駆動するよう連結されている。補正回路は、少なくとも1つの磁界センサから選択された周波数にて信号を受信し、定義済みベースラインからの信号における偏位に応答して、ベースラインに信号を戻すよう構成された振幅を有する駆動電流を使用して、少なくとも1つのシムコイルを駆動するよう連結されている。
(もっと読む)
近接センサ

【課題】検出コイルを金属製の外殻で覆っても、渦電流損失を小さく抑え、必要十分な位置検出感度を得ることができる近接センサを提供する。
【解決手段】二つのコイルに矩形波電圧を印加して、各々のコイルに流れる電流を独立して検出してから差動回路等で差を演算するのではなく、直接電流の差の値を検出することにより、S/N比が良好であり高感度な近接センサを実現できる。また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
(もっと読む)
電磁アクチュエータの変位位置検出装置
【課題】PWM信号で駆動される電磁アクチュエータの変位位置を、簡単な構造及び簡単な検出手段で検出できる装置を提供する。
【解決手段】電磁アクチュエータ1は、可動コア11a、駆動コイル12、検出コイル13を有する。駆動回路22は、PWM信号に従い、駆動コイル12に駆動電流を供給する。検出コイル13は、可動コア11aの変位位置に応じて駆動コイル12との相互結合係数が変化する位置に配置される。サンプリング信号発生回路31は、PWM信号発生回路21が出力するPWM信号に同期してサンプリング信号のタイミングを生成し、同期サンプリング回路32は、このサンプリング信号に同期して検出コイル13の出力電圧をサンプリングし、変位位置検出データを出力する。補正部33は、PWM信号のデューティ比に応じてこれを補正する。
(もっと読む)
漏洩磁束検出型回転位置検出装置を組み込んだ液密サーボモータ装置
【課題】小型化、液密構造に適し、温度ドリフト補償に優れ、検出信号の伝送路のインピーダンス変化の影響を受けにくい回転位置検出装置を備えたサーボモータ装置を提供する。
【解決手段】サーボモータ1と共に液密にケーシング4内に収納されたセンサ10は、サーボモータ回転子から生じる漏洩磁束を検知する複数のコイルを備え、各コイルに対応して高透磁率磁性体がそれぞれ近接配置され、該高透磁率磁性体においては回転位置に対応する漏洩磁束の変化に応じて磁気飽和が生ぜしめられる。各コイルは磁気飽和の変化特性に応じて、回転位置に対応した振幅関数を持つ交流信号を出力する。正弦関数的振幅特性の2つのコイルは漏洩磁束の変化に対して互いに逆相となるように配置され、余弦関数的振幅特性の別の2つのコイルも同様に互いに逆相となるように配置される。この出力交流信号を合成して、電気的位相によって回転位置を示す検出信号を生成する。
(もっと読む)
バリアブルリラクタンス型角度検出器
【課題】出力精度を向上させつつも容易に製造することが可能なバリアブルリラクタンス型角度検出器を提供する。
【解決手段】余弦相出力巻線は、各余弦相出力コイル25における誘起電圧25eの分布が周方向において正弦波状となるように構成される仮想巻線状態から、誘起電圧25eの和が余弦相出力電圧と同周期となる組み合わせの余弦相出力コイル25を省略した態様で巻回される。
(もっと読む)
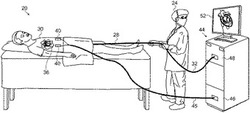
電磁追跡システムの動的金属歪補償のためのシステム及び方法
電磁場発生器(12)による電磁場を用いて電磁追跡システム(EMTS)(10)を用いる動的金属歪補償のための方法及びシステムを提供する。複数の基準マーカ(14)が備えられ、各々の基準マーカは少なくとも1つの電磁センサ(26)を有し、少なくとも1つの電磁センサは複数のセンサオリエンテーションに方向付けられ、センサの少なくとも一部は所定ボリュームに近接して位置付けられる。基準マーカ(14)は画像空間においてそれらの位置を与えるように画像化される。電磁センサ(26)の位置読み取りはEMTSを用いてモニタリングされる、金属歪補正関数は、電磁センサの位置と画像空間の基準マーカの位置を比較することにより演算される。所定ボリュームを通って移動する医療装置(16)はまた、EMTSを用いて追跡され、歪補正関数が、歪を補償するように医療装置の位置読み取りに適用される。 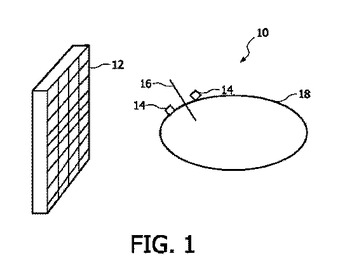 (もっと読む)
(もっと読む)
シリンダ位置検出装置
【課題】 小型かつシンプルな構造を持つシリンダ位置検出装置の提供。
【解決手段】 ピストンロッドの表面においてストローク変位方向に沿って面積が漸増又は漸減する区間を有する所定のパターンで配置された磁気応答部と、磁気応答部に対応してシリンダ本体の側に固定され、1相の交流信号で励磁されるコイルと、該交流信号が印加されるインピーダンス手段と、コイル及びインピーダンス手段の電圧をそれぞれ取り出し、ピストンロッドのストローク位置に対して異なる振幅特性をそれぞれ示す複数の交流出力信号を生成するアナログ演算回路とを具備する。ピストンロッドの直線的ストローク位置の変位に応じて該コイルに対する該磁気応答部の対応面積が変化し、この対応面積変化に応じて該コイルのインダクタンスが変化し、該コイルに対する前記磁気応答部の対応面積が漸増又は漸減する区間に対応して該コイルの両端間電圧が漸増又は漸減する。
(もっと読む)
研磨監視方法および研磨装置
【課題】研磨装置の運転を停止させることなく渦電流センサの較正を行うことができ、精度の高い膜厚監視を可能とする研磨監視方法および研磨装置を提供する。
【解決手段】基板の水研磨時、研磨パッド10のドレッシング時、または研磨パッド10の交換時において、渦電流センサ50の出力信号を補正信号値として取得し、補正信号値から補正基準値を減算して補正量を算出し、導電膜を有する他の基板を研磨しているときの渦電流センサ50の出力信号から補正量を減算して実測信号値を算出し、実測信号値の変化を監視することにより研磨中の導電膜の厚さの変化を監視する。
(もっと読む)
位置検出装置および医療装置誘導システム
【課題】磁界検出部を検知体に近接して配置でき、装置の小型化、低コスト化を図りつつ、検知体の位置を精度よく検出する。
【解決手段】少なくとも1つの内蔵コイル3aを含む回路を備える検知体3が配置される検出空間Sに対し、少なくとも1つの磁界発生コイルを備え第1の磁界を発生させる第1の磁界発生部2と、発生された第1の磁界により内蔵コイル3aから発生される誘導磁界を検出するよう配列された複数の検出コイル4aを備える磁界検出部4と、第1の磁界発生部2により発生され検出コイル4aに入射する第1の磁界に対して略逆位相の磁界成分を有する少なくとも1つの磁界発生コイルを備え第2の磁界を発生させる第2の磁界発生部6とを備え、第1の磁界発生部2と検出コイル4aとが、第1の磁界の発生方向と、誘導磁界の検出方向とを交差させるように配置されている位置検出装置1を提供する。
(もっと読む)
センサ付き転がり軸受装置の製造方法
【課題】センサ付き転がり軸受装置の位置や、センサ付き転がり軸受装置に加わっているモーメント荷重の大きさを、精密に測定することができるセンサ付き転がり軸受装置を製造するセンサ付き転がり軸受装置の製造方法を提供すること。
【解決手段】内軸1、内輪2、外輪3、第1の玉4および第2の玉5を組み付ける。その後、内輪2の外周面の軸方向の一端部に、ターゲット部材61の軸方向の一端部を圧入すると共に、外輪3と内輪2との間のターゲット部材61側の開口を、シールド板7で密封する。この状態で、内軸1を、略内軸1の中心軸の回りに回転させた上で、ターゲット部材61の外周面を加工する。
(もっと読む)
検知体位置検出システム
【課題】 検知体を検出空間内に導入した後に、検知体を取り除くことなく、キャリブレーションを行うことができる検知体位置検出システムを提供する。
【解決手段】 位置検出用磁界を発生する磁界発生部3と、共振磁界を発生する共振回路21と共振回路21の経路を接続または切断する外部信号型スイッチとを有する検知体5と、外部信号型スイッチの接続または切断を制御するスイッチ制御部7と、位置検出用磁界および共振磁界の少なくとも一方の磁界強度を検出する位置検出用磁界検出部9と、位置検出用磁界検出部9の検出信号に基づき、検知体5の位置および向きを算出する位置算出部11と、が設けられたことを特徴とする。
(もっと読む)
複数のEMセンサ位置を補正するための方法及び装置
【課題】複数のEM受信器を利用したトラッキングシステムにおいて磁場歪みを補正する技法を提供する。
【解決手段】本技法の一態様では、電磁場の存在下で複数の電磁気センサ(12、14)の箇所を表す信号を収集し、1つまたは複数の品質計測値に基づいて複数の電磁気センサ(12、14)からの信号間で選択を行う。本技法の別の態様では、1つまたは複数の電磁場歪みを補正するのに最適なEMセンサを選択するためのシステム(10)が提供され、複数のEMセンサ(12、14)と、該複数のEMセンサ(12、14)の各々の位置を表す信号を送信または受信するための追加的EMセンサ(16)と、複数のEMセンサ(12、14)の箇所を表す信号を収集し、1つまたは複数の品質計測値に基づいて複数のEMセンサ(12、14)の信号間で選択を行うように構成させた制御器(22)を含む。
(もっと読む)
渦電流式導電体検出装置
【課題】ターボチャージャなどの回転数や導電体との位置関係を検出する渦電流式導電体検出装置において、温度変化による出力変動を低減し高精度に導電体を検出すること。
【解決手段】渦電流式導電体検出装置のLC並列接続回路から出力される信号電圧に基づいてコイルに対する導電体の位置情報を検出する信号処理回路を備える渦電流式導電体検出装置において、出力の高温時と低温時の出力差が周波数軸上にて2つの一致点をもち、かつ、これら2つの一致点の周波数において低温時にも高温時にも相当に大きな出力差を確保できることを見出した。これら2つの一致点のどちらかの周波数をもつ交流電流をこのLC並列接続回路に与えれば、少なくとも上記所定の低温時の上記所定の高温時とでの出力変動をキャンセルすることができ、温度変動による出力誤差を解消でき、温度変化にもかかわらず回転数を高精度に検出できる。
(もっと読む)
渦電流センサおよび同センサのセンサ・コイル
【課題】温度以外の環境要因の影響を受け、測定回路内で変化する寄生容量を原因とするセンサ出力信号のドリフトを減少させ、渦電流センサの測定精度を向上させる。
【解決手段】ヘッド部分を持つセンサ回路を有する渦電流センサにおいて、センサ回路は、センサ・コイル、ベース部分、ヘッド部分をベース部分に接続する通信ケーブルを含む。センサ・コイルは、内部導体とケーブルの外側シールドとの間に接続される。ベース部分は、ケーブルの線路容量をセンサ・コイルから分離し中心導体の電圧を緩衝し、3軸ケーブルの内側シールドに印加する電圧フォロワを備える。
(もっと読む)
移動距離計測装置および移動距離計測方法
【課題】 移動体の構造物に対する相対移動距離を、簡易に高い信頼性で測定する。
【解決手段】 移動体31の導電性の構造物2に対する相対移動距離を測定する移動距離計測装置において、移動体31と一体となって移動し、交流電圧が負荷される移動検出用励磁コイル3と、移動検出用励磁コイル3に対して移動体31の移動方向の前方および後方に配置された、移動体31と一体となって移動する少なくとも2つの検出コイル4a,4bと、検出コイル4a,4bに発生した励起電圧の振幅比および位相差に基づいて、移動体31の構造物2に対する相対移動距離を算出し、移動検出用励磁コイル3に負荷された電圧に対する励起電圧の振幅比に基づいて、移動体31と構造物2との距離を求め、相対移動距離を補正する移動距離演算手段を有する。
(もっと読む)
表面形状測定用触針式段差計及びその自動較正方法
【課題】
触針式段差計において探針を交換した後に行う力の較正を自動的に短時間で正確に行う方法及び該自動較正機能を備えた触針式段差計を提供する。
【解決手段】
本発明の方法は、針圧発生装置のコイルに流す電流と探針の針圧との関係を求め、求めた関係に基いて探針の針圧の変化を自動的に較正する。また本発明の自動較正機能を備えた触針式段差計においては、針圧発生装置のコイルに流す電流と探針の針圧との関係を求め、求めた関係に基いて探針の針圧の変化を自動的に較正するコンピュータ手段が設けられる。
(もっと読む)
共通モード修正巻線及び簡素化された信号処理を有する誘導位置センサー
回転運動用誘導位置センサーは、送信コイル、及び送信コイルが交流電源により励磁される時に受信機信号を生成する受信コイルを含む。可動カプラー要素は、受信機信号がカプラー要素の位置に感応するように、送信コイル及び受信コイルとの間の誘導結合を変更する。受信機信号及び参照信号の比率は、カプラー要素の位置に感応するが、共通モード因子には実質的に感応しない。位置センサーの角度範囲又は位置範囲は、複数の受信コイルを使用して増大させることができる。 (もっと読む)
回転角検出センサの基準点補正方法
【課題】 別途調整工程を設けることなく、複数の回転角検出センサの検出基準点を補正する回転角検出センサの基準点補正方法を提供すること。
【解決手段】 操舵軸11に組み付けられた2個一対のレゾルバ11b,11cの検出基準点を補正する補正方法を、回転角検出工程、1次補正工程、可動範囲検出工程および2次補正工程で構成した。回転角検出工程は、組み付け直後のレゾルバ11b,11cからの出力値から操舵軸11の回転角を検出する工程である。1次補正工程は、回転角の検出基準点を暫定的に補正する工程である。可動範囲検出工程は、1次補正工程で補正された基準点に基づき操舵軸11の可動範囲を検出する工程である。2次補正工程は、操舵軸11の回転角0゜とレゾルバ11b,11cからの信号に基づき検出した回転角との相違量に基づき、検出基準点を最終的に補正する工程である。
(もっと読む)
渦電流式検出センサ
【課題】 被検出体の厚みの差異に拘わらす測定が可能で、かつ温度特性に優れる渦電流式検出センサを提供することを目的とする。
【解決手段】 渦電流式検出センサ1は発振回路10、検波回路20、比較回路30を主体として構成され、このうちの発振回路10は検出コイルLとコンデンサCとからなるLC並列共振回路11と増幅回路12とを備えてなる。そして、検出コイルLは互いに逆向きに巻かれたコイル部La、Lbとから構成されており、検出コイルLに対して励磁電流が流されたときに、互いが作る磁束同士が打ち消しあうようになっている。これにより、検出コイル全体では、必要な抵抗成分を確保しつつ、インダクタンス成分を小さくすることが可能となり、被検出体の厚みの差異に拘わらす測定が可能で、かつ温度特性に優れる渦電流式検出センサを提供することが可能となる。
(もっと読む)
誘導性センサ
対象物たとえば人間の指の温度または存在などの外部パラメータを検知するセンサは、(i)励起コイル(68、70)と、(ii)励起信号を生成するように動作することができ、生成された励起信号を励起コイルに加えるように構成される信号発生器(41、61、62、63)と、(iii)信号発生器により励起信号が励起コイルに加えられるのに応答して、電気信号がセンサ・コイルに生成されるように、通常受動共振回路の形で中間装置またはターゲット(74)を介して励起コイルに電磁的に結合することができるセンサ・コイル(74)と、(iv)センサ・コイル内で生成される周期的な電気信号を処理して、検知されるパラメータを表す値を決定する信号プロセッサとを備える。たとえば、PTC抵抗またはNTC抵抗、あるいは対象物が近接することによって影響を受けるコンデンサを備えることにより、中間装置は、検知すべきパラメータに敏感であり、その結果、センサ・コイル内で生成される周期的な電気信号は、パラメータの影響を受ける。やはり、センサは、たとえば中間装置における追加の共振回路によって、実質上励起信号と同じ周波数で更なる信号を生成することができ、信号プロセッサは、センサ・コイル内で生成される周期的な信号、および更なる信号から外部パラメータの値を決定する。たとえば、センサは、オペレータがいつ接触するかを検出するために、接触作動式の構成部品のアレイにおいて使用することができる。  (もっと読む)
(もっと読む)
1 - 20 / 22
[ Back to top ]