
Fターム[2F063DD08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器の組み合せ (1,287) | 異種の検出器を組み合せたもの (86)
Fターム[2F063DD08]に分類される特許
1 - 20 / 86
位置測定装置
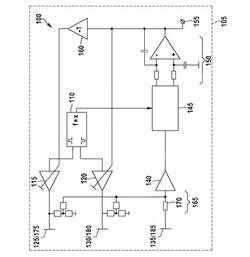
【課題】操作の容易な高感度の位置測定装置を提供する。
【解決手段】第1の電気装置及び/又は第2の電気装置の電圧のそれぞれの比が予め定められた比に対し所定の基準よりも大きく異なっていると、物体が検出されたことを表す信号を形成するよう構成されている比較器と、第1の電気装置及び/又は第2の電気装置の電圧のそれぞれの比が予め定められた比に対し所定の基準よりも大きく異なっていると、物体を表す信号を出力する出力装置とが設けられている。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム

【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
接触面形状測定装置
【課題】柔軟な物体同士の接触面の形状をより正確に測定できる測定装置を提供することを目的とする。
【解決手段】本発明にかかる接触面形状測定装置100は、柔軟な物体102、104同士の接触面106の形状を測定する測定装置において、接触面に沿って配置される柔軟性を有する基板108と、基板に貼付され貼付位置での基板の歪量を測定する2つ以上の歪センサ110と、歪量に基づいて曲率を算出し、該曲率に基づいて、2つ以上の歪センサが貼付された経路に沿った接触面の形状を近似した曲線を算出する形状近似部120と、基板上の経路に配置され配置位置での基板の傾斜角を測定する少なくとも2つの加速度センサ112と、いずれかの加速度センサの配置位置における近似した曲線の接線角と測定した傾斜角との差分を算出する比較部122と、差分が所定の値以内に収まるように、近似した曲線を補正する補正部124とを備えることを特徴とする。
(もっと読む)
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
(もっと読む)
位置検出装置、位置検出方法及び撮像装置
【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
位置検出ユニット、及びそれを備えたレンズユニット、カメラ、及びレンズユニットの製造方法、位置検出方法
【課題】起動時において検出対象物を所定の基準位置まで移動させることなく、絶対的な位置を検出することができる位置検出ユニットを提供する。
【解決手段】本発明は、位置検出ユニットであって、検出対象物(16)の変位に対し、単調に増加又は減少する単調信号を出力する第1センサ(20)と、検出対象物の変位に対して互いに位相がずれた2つの正弦信号を出力する第2センサ(24)と、検出対象物の位置に対する単調信号を記憶する第1記憶部(26)と、各正弦信号の極大値及び極小値を記憶する第2記憶部(26)と、検出された単調信号及び記憶された単調信号データに基づいて、検出対象物が正弦信号の何周期目に位置するかを特定すると共に、検出された正弦信号及び記憶された極大極小データに基づいて、特定された周期内における検出対象物の位置を計算し、絶対的な位置を求める位置演算部(28)と、を有することを特徴としている。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて、第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて前記第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、第2位置情報の相対的な変位を検知した場合に、第2位置情報の変位に応じて補正テーブルを生成する補正テーブル生成部とを備える。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す第1の補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、予め生成されている複数の補正テーブルの中から、第2位置情報の相対的な変位に応じて第2の補正テーブルを選択し、選択した第2の補正テーブルに基づいて、第1の補正テーブルを変更する補正テーブル変更部とを備える。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
位置検出装置
【課題】位置検出性能の低下を防ぎ、安定した位置検出性能を得られる、複数の位置検出方式を備える位置検出装置を提供する。
【解決手段】第1の位置検出方式における送信導体の選択位置情報を第2の位置検出方式における信号受信のための導体選択に利用することで、第1の位置検出方式における送信導体と第2の位置検出方式における受信導体との間の空間的距離を可能な限り離間させる。更には、第1の位置検出方式における送信導体に供給される送信信号と第2の位置検出方式における送信導体に供給される送信信号との間に周波数インターリーブの関係を備える。
(もっと読む)
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
操向トルク及び操向角測定装置並びにこれを備えた車両用操向装置
本発明は操向トルク及び操向角測定装置に係り、出力軸に固定されるステータと、ステータの内面に配置され、入力軸に固定されるマグネットと、ステータとマグネットとの間で発生する磁場を感知して操向トルクを測定するトルクセンサーと、通常はON信号を出力し、出力軸が回転すると、出力軸の定められた回転区間毎にOFF信号を出力して操向角を測定する操向角信号発生部と、を含む。これにより、部品数を減らし、製造工程を単純化し、コストを節減することができる。 (もっと読む)
ステアリング角度センサ
【課題】 ステアリングコラムのハウジングに取り付けることができる、対費用効果に優れたセンサを提供する。
【解決手段】 定置構成要素に関して回転する回転自在構成要素の回転量を決定するための装置は、第1端が回転自在構成要素に固定され、第2端が定置構成要素に固定されたケーブルを含む。ケーブルは感知エレメントを支持し、回転自在構成要素が定置構成要素に関して回転するとき、巻き付けられたり巻き解かれたりするように形成されている。感知エレメントは、ケーブルの長さに沿って延び、ケーブルの巻き付け又は巻き解きに応じて撓むように形成されている。感知エレメントの抵抗は、感知エレメントの撓みに応じて変化する。評価回路が感知エレメントに接続されており、抵抗に対して所定の関係を持つ値を決定し、この値に基づいて回転量を決定する。
(もっと読む)
位置検出装置
【課題】表面に近い検出部の配線の手間を低減するとともに配線周りの構造を簡素化することができる位置検出装置を提供すること。
【解決手段】位置検出装置100は、人体により指示された位置を検出するものであって、複数の検出用電極が形成された検出領域112と検出用電極から引き出された配線が形成された配線領域114とを有するセンサ基板110と、センサ基板110が収納される筐体140とを備える。センサ基板110は、配線領域114と対向する位置に、固定電位に接続された導体116を有する。
(もっと読む)
位置検出装置
【課題】表面に近い検出部の配線の手間を低減するとともに配線周りの構造を簡素化することができる位置検出装置を提供すること。
【解決手段】位置検出装置100は、人体により指示された位置を検出するものであって、複数の検出用電極が形成された検出領域112と検出用電極から引き出された配線が配設された配線領域114とを備える柔軟性を有するセンサ基板110と、センサ基板110を収納する収納部144を有する筐体140とを備える。収納部144にセンサ基板110の配線領域112を挿通する貫通孔142が設けられている。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
樹脂被覆管の管端連結位置検出装置および方法
【課題】連結部の段差の発生による検出位置の誤差を補正可能な管端連結部検出装置の提供。
【解決手段】樹脂被覆後の管端連結部4を渦電流を用いて検出する渦流検出器1と、管端連結部4前後に発生する管端の段差量5を計測する段差量計測器2と、前記段差量5の計測結果が一定量以上の場合にのみ前記管端連結部4の検出位置信号に補正を加える補正演算器8とを有する、樹脂被覆管3の管端連結位置検出装置とした。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
搬送波型ひずみ測定装置
【課題】 使用回路は、環境問題にも配慮したRoHS対応部品で構成し、電源ノイズの低減を図りつつ、浮遊容量などによる不平衡成分を自動的に常時打消し、測定ブリッジに含まれるひずみゲージに応じた抵抗値変化に伴う実際の抵抗成分を精度よく測定する。
【解決手段】 搬送波型ひずみ測定装置は、測定ブリッジ11、該ブリッジ11の出力を入力する入力トランス12、該ブリッジの出力を帰還された補償量で補正する打消し回路14、1次側電源回路18を含む1次側の回路系統と、該測定ブリッジ11の出力から前記補償量を作り出す搬送波増幅回路21、容量分位相検波回路23、容量分打消し駆動回路24、搬送波発振回路26および2次側電源28を含む2次側の回路系統とに分けて構成されている。1次側の回路系統と2次側の回路系統とは、磁気的な結合手段と、光学的な結合手段である光信号伝達手段とを介してのみ結合され、電気的な接続部分は有しない。
(もっと読む)
1 - 20 / 86
[ Back to top ]