
Fターム[2F063GA00]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967)
Fターム[2F063GA00]の下位に属するFターム
電磁誘導型、コイルによる検出 (846)
リードスイッチで検出 (9)
磁電変換素子、磁気抵抗素子、ホール素子 (722)
磁歪線を用いるもの (8)
引力、斥力を検出するもの (3)
磁束の方向を検出するもの (17)
磁力調節部を有するもの (5)
流体、粉体を使用するもの (5)
リード線、電気端子について言及 (9)
コード板、スケールの形状、構造 (182)
コード板、スケールの磁性体配列 (22)
コード板、スケールの材料 (25)
製造方法について言及 (59)
その他の特徴 (7)
Fターム[2F063GA00]に分類される特許
21 - 40 / 48
移動体の位置検出方法及び装置
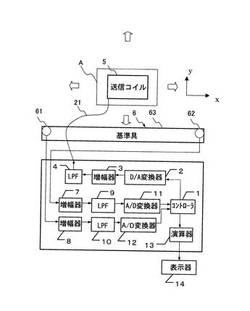
【課題】移動体が既に検査を終了した領域と、未検査領域との区別が明確に行え安全かつ高精度に移動体の位置を検知できるようにする。
【解決手段】移動体Aに設けた磁気を発信する送信コイル5と、送信コイル5が発信する磁気を受信する複数の受信コイル61,62を同一平面状において離隔配置した基準具6と、受信コイル61,62で受信した磁気情報に基づいて当該各受信コイル61,62から前発信コイル5までの距離を演算し、得られた各距離情報に基づいて発信コイル5の座標位置を決定し、出力する演算手段を有する。
(もっと読む)
ヘッドモーショントラッカ装置及びその使用方法

【課題】 交流磁気方式のHMT、光学方式のHMTにおいて測定不可のときに、移動体に設定された基準方向に対する頭部角度を算出することができるヘッドモーショントラッカ装置及びその使用方法を提供する。
【解決手段】 磁気方式又は光学方式モーショントラッカにより搭乗者の頭部角度を含む第一相対頭部情報を算出する主頭部情報算出部とを備えた移動体センサと、移動体センサに基づいて移動体の動きを表す絶対移動体情報を算出する絶対移動体情報算出部と、頭部センサと、頭部センサの出力信号に基づいて移動体と頭部との動きとを合成した絶対頭部情報を算出する絶対頭部情報算出部と、絶対移動体情報と絶対頭部情報とに基づいて第二相対頭部情報を算出する副頭部情報算出部と、主頭部情報算出部による第一相対頭部情報の算出が不適当な領域において副頭部情報算出部により第二相対頭部情報を算出する切替部とを備える。
(もっと読む)
変位、歪および力センサ
変位、歪、および/または、力センサアセンブリ(10、110)は、X軸に沿った変位、歪、および/または、力の測定を促進する異方性剛性を有する一方で、望まれないYおよびZ軸に沿った変位、歪、および/または、力およびX、YおよびZ軸の回りの回転に起因するエラーが抑制する搭載構造(12)を有する。X軸に沿った軸方向の変位に応答するように構成されている台座(30、130)は、搭載構造(12)のX軸上の中央に配置されており、変位または歪センサ(38)は変位、歪および/または力の測定を提供するために台座(30)へ連結されている。コンタクトパッド(14、114)は、上記変位および/または歪センサアセンブリが適用構造へ固定されることが可能なように、上記搭載構造のX軸の両端に形成されている。  (もっと読む)
(もっと読む)
磁束密度のゼロ位置通過を安定化させた位置センサ用エンコーダ
【課題】空隙変化に対し安定な位置及び/又は速度センサ用エンコーダを提供する。
【解決手段】一の小磁極Pと一の大磁極Gとの間に少なくとも一の接合面Jを有しており、大磁極Gは小磁極Pの角度幅よりも大きな角度幅を有し、各接合面Jに対応する小磁極Pと大磁極Gは反対符号の極性を有するエンコーダに関する。各接合面Jに関して、所定の符号を有する大磁極Gは、一方では、前記所定符号と同じ符号の少なくとも一の小安定極psであって、反対符号の小磁極Pに隣接し、この小磁極Pの角度幅と実質的に同一の角度幅を有する小安定極psと、他方では、小安定極psと同じ符号の少なくとも一の相補極pcであって、この相補極pc及び/又は小安定極psが、磁束密度における放射方向成分のゼロガウス位置通過を安定化するように適合された傾斜型の磁界強度を示す相補極pcとから成る。
(もっと読む)
コンベヤベルトのモニタリング方法および装置
【課題】コンベヤベルトの蛇行による磁気センサの測定値の狂いを是正し、高精度のモニタリングを可能としたコンベヤベルトのモニタリング方法および装置を提供する。
【解決手段】ゴム磁石3をコンベヤベルト2に埋設し、ゴム磁石3が通過する位置に配設した磁気センサ4により、ゴム磁石3の磁力の変化を測定することにより、コンベヤベルト2の状態の変化を検出するようにしたコンベヤベルト2のモニタリング方法において、コンベヤベルト2の蛇行量を、蛇行測定手段により測定し、その測定した蛇行量に基づいて、磁気センサ4により測定したゴム磁石3の磁力の測定値を補正して、コンベヤベルト2の状態の変化を検出する。
(もっと読む)
リムずれ量測定装置およびリムずれ量測定方法
【課題】実車試験においても、リムずれ量を精度良く測定することができるリムずれ量測定装置およびリムずれ量測定方法を提供すること。
【解決手段】リムにリム組みされた空気入りタイヤに設けられ、かつ異なる極性が交互にタイヤ周方向に連続する磁気スケール2と、磁気スケール2と対向するようにこのリムに設けられ、この磁気スケール2の移動による極性変化を検出する磁気センサ3と、検出された極性変化をカウントするカウント部45とを備える。空気入りタイヤがリムに対してタイヤ周方向にずれると、磁気スケール2がリムに対してタイヤ周方向に移動し、磁気センサ3に対向する磁気スケール2の位置が変化し、磁気センサ3と対向する位置における磁気スケール2の極性が変化する。従って、カウント部45によるカウント数から磁気スケール2の異なる極性の間隔に応じたリムずれ量を測定することができる。
(もっと読む)
トーショナルダンパ
【課題】ハブに対するセンサプレートの滑りや脱落によって検出精度が低下するのを防止し、かつ装着作業性を改善したトーショナルダンパを提供する。
【解決手段】回転軸に装着されるボス部11と連結しているハブ2と、ハブ2の外周側に同心的に配置された質量体3と、ハブ2と質量体3との間に圧入嵌合されるゴム状弾性体の弾性体4と、ハブ2と一体で回転する被検出部52が形成されているセンサプレート5とを備え、センサプレート5とハブ2とを一体で成形した。
(もっと読む)
角度位置を検出する検出装置、電動機、ステアリングコラムおよび減速装置
角度位置を検出するための装置、電動機、ステアリングコラムおよび減速装置
である。非回転要素に対する電動機の軸2の角度位置を検出するための検出装置1において、軸2に接続されて回転する入力側、そして出力側を有する減速装置5を備え、減速装置5の出力側には、2πより小さい角度に亘って移動し、減速装置5の出力側の角度を測定するため一回転角度位置センサー26が配設されており、かつ、減速装置5の入力側に角度位置センサー27が配設されている検出装置1。  (もっと読む)
(もっと読む)
駆動車輪用軸受装置
【課題】ハブ輪と等速自在継手と軸受とをユニット化した駆動車輪用軸受装置において、車両姿勢制御用の適切な情報を得るための手段を軸受装置自体に設けることにより、路面の状況変化等に対する車両姿勢制御システムの応答性を向上させ、かつ正確で安全な車両姿勢制御を行えるようにする。
【解決手段】この駆動車輪用軸受装置は、ハブ輪10と等速自在継手40と軸受20とをユニット化し、等速自在継手40の外側継手部材41のステム部45の外周にハブ輪10を嵌合させてこれら外側継手部材41とハブ輪10とで内方部材29を構成したものとする。軸受20の複列の内周側軌道面27,28のうち、一方の軌道面27をハブ輪10に形成し、他方の軌道面28を外側継手部材41に形成する。
(もっと読む)
磁気マッピング装置
【課題】 磁気方式のHMTの使用する上で必要な磁気データの取得を短時間で行うことができる磁気マッピング装置を提供する。
【解決手段】 磁気ソース2と、支持体16と、支持体に取り付けられ磁界中の磁気データを測定する磁気センサ3と、支持体の外表面に取り付けられ磁気センサに対する位置が固定された少なくとも3つのマーカ群18と、3つのマーカを同時にステレオ視するための一対のカメラ12、14と、一対のカメラで撮影された各画像に同時に映る3つのマーカの画像上の位置に基づいてこれら3つのマーカの位置座標を求めるとともに求めた3つのマーカの位置座標に基づいて磁気センサの位置座標を算出する磁気センサ位置算出部21と、算出された磁気センサの位置座標とカメラ画像の撮影時に測定された磁気データとに基づいて位置座標と磁気データとを対応付けた磁気マッピングデータを蓄積する磁気マッピング部22とを備える。
(もっと読む)
シート位置検出装置
【課題】シート位置を安価に且つ正確に検出することができるシート位置検出装置を提供すること。
【解決手段】シートに固定されたアッパレール2をフロアに固定されたロアレール1に対してスライド可能に組み付けることによって前記シートの前後方向位置を調整可能としたシートスライド装置に設けられる装置であって、前記シートの前後方向位置を磁気的に検出するためのシート位置検出装置において、前記ロアレール1の前端に磁性体(鉄板)から成る検知プレート20を設け、該検知プレート20を磁気的に検知する近接センサ21を前記アッパレール2の前端内部に設ける。
(もっと読む)
磁気マーカ検出装置
【課題】本発明は、効率的に故障認識を行うことができる磁気マーカ検出装置の提供を目的とする。
【解決手段】走行路11上に敷設された磁気マーカMの発する磁界を検出する磁気センサ3内に車両2の所定方向に並んで配列される複数の磁気検出部を備え、複数の磁気検出部のうち所定の磁界強度条件を満たす磁気検出部を含む領域の中心位置を車両2に対する磁気マーカMの位置と認識する磁気マーカ検出装置であって、前記領域の中心位置と前記領域のうち前記所定の磁界強度条件を満たす磁気検出部が途切れることなく連続する領域の中心位置とを比較し、両中心位置が異なる場合には故障した磁気検出部があると判定する、磁気マーカ検出装置。
(もっと読む)
非破壊検査装置および非破壊検査装置のコイルの設計方法
【課題】断熱材で保温等がなされている配管についても、非接触で配管の腐食部および肉厚が測定できる非破壊検査装置を提供する。
【解決手段】非破壊検査装置10は、断熱材22に覆われた配管21に対して、断熱材22を介して配管21の上に載置されるセンサ11と、センサ11を駆動する測定装置19とを含む。センサ11は、所定の距離離れた位置にある配管21の腐食部の寸法を測定可能であり、測定装置19はセンサ11からの出力を入力して配管21の腐食部の厚さを演算するパソコン18を含む。
(もっと読む)
タイヤ変形量の推定方法とその装置
【課題】 バルクハウゼンノイズの応力による変化の検出精度を向上させて、タイヤの変形量を正確に推定する方法を提供する。
【解決手段】 タイヤ50のショルダー部51の内部側に貼着され強磁性体から成るセンサ11に電磁波を放射し、上記センサ11からのバルクハウゼンノイズが重畳した電磁波の信号を検出し、この信号から抽出されたバルクハウゼンノイズのデータからタイヤ変形量を測定する際に、上記抽出されたバルクハウゼンノイズを周波数分析してその周波数スペクトルを求めるとともに、上記センサ11に応力が作用した場合と作用しない場合のそれぞれについて、上記周波数スペクトルの高調波出力を算出し、この高調波出力の大きさを比較することにより、当該タイヤ50のショルダー部51の変形量を推定するようにした。
(もっと読む)
磁極類似物を用いる変位検出センサーを装備するペダル
本明細書で開示するのは、磁極類似物を用いる変位検出センサーを装備するペダルである。前記ペダルには、ペダルユニット、緩衝装置、センサー挿入装置、棒装置、及び検出装置が含まれる。前記ペダルユニットには、支持プレート、前記支持プレートに連結された作動ペダル、緩衝ヒンジ、及び結合ヒンジが含まれる。前記緩衝装置には、緩衝マウント部、緩衝シリンダー内に設けられた支持軸、及び緩衝スプリングが含まれる。前記センサー挿入装置には、前記緩衝装置の中心に位置する挿入ハウジング、上部支持座部に載置された上部永久磁石、下部支持座部に載置された下部永久磁石、及びセンサー支持部が含まれる。前記棒装置には、棒マウント穴を有する棒マウント部、及び円筒状挿入棒が含まれる。前記検出装置には、前記棒装置の中心に位置するセンサーハウジング、及び変位センサーが含まれる。 (もっと読む)
磁気センサの位置計測方法
【課題】余分の格別な機能手段を用いることなく、低コストで精度良く、磁気センサの位置を計測し得る磁気センサの位置計測方法を提供する。
【解決手段】測定の都度、複数の磁気センサMD1,MD2、・・・、MDNを海中の所定領域2に展開配置する可搬型磁気測定装置において、磁気マーカーMMを移動艦艇Sの特定部位例えば船首STに固定し、移動艦艇Sが磁気センサMD1,MD2、・・・、MDNの配置領域2を移動し、磁気マーカーMMの発生磁界を磁気センサMD1,MD2、・・・、MDNで検出処理し、その検出磁気から各磁気センサの位置及び被測定艦艇と各自磁気センサの相対位置を求める。
(もっと読む)
コンベヤベルトの摩耗検出装置
【課題】 コンベヤベルトの摩耗量を、運転中に自動的に、しかも簡単かつ正確に検出できるようにしたコンベヤベルトの摩耗検出装置を提供する。
【解決手段】 厚さ方向に磁化された複数のゴム磁石M1、M2、M3を、表面に現れる極性が交互に逆になるように重合して、コンベヤベルト2に埋設し、コンベヤベルト2の摩耗に伴うゴム磁石M1、M2、M3の摩耗による磁力の変化を検出する磁気センサ4を、ゴム磁石M1、M2、M3が通過する位置に配設する。
(もっと読む)
改良された形状特徴化のためのデバイスおよび方法
【課題】非接触でトラッキングデバイスに相対するボディの形状および向きを決定する。
【解決手段】形状特徴化を用いて、剛性または略剛性の移動可能なボディの形状および向きが決定される。センサは、ボディの境界ボリュームを決定するために解析されるボディの異なるパースペクティブ(透視図)の複数表示をキャプチャする。ボディの形状は境界ボリュームに基づいて決定される。ボディは、ボディの位置を検知するトラッキングデバイスを用いて位置決めされる。境界ボリュームと位置情報が組み合わされて、ボディの空間における形状および向き、特に、ボディの対象となるポイントの位置を画定する。
(もっと読む)
幾何学的形状の取得のための方法及び装置
本発明は、幾何学的形状を取得する方法及びデバイスに関する。本発明による方法は、1セットのセンサ(4a)をこの形状(曲線又は表面)の上に配置し、各センサが、このセンサの位置における曲線又は表面の向きを表わす信号を出力するステップ、曲線又は表面のモデルを選択するステップ、信号に基づいてモデルパラメータを決定するステップ、及びこれらのパラメータに基づいて幾何学的形状の上のポイントの空間分布を決定するステップを含む。本発明は特に、機械加工、建具、石工術、及び建築の分野への使用に適している。 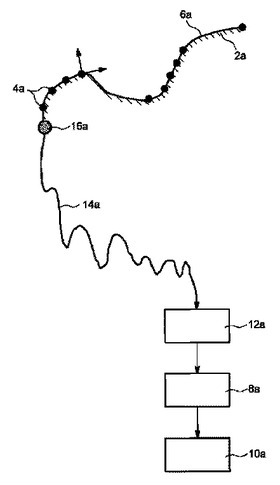 (もっと読む)
(もっと読む)
回転角検出装置の回転角補正方法
【課題】自動車の車体制御システムなどに用いられる多回転のハンドル回転角検出装置において、機械誤差、電気誤差、磁気誤差をより少ない補正データで補正する高精度な回転角検出装置の回転角補正方法を提供する。
【解決手段】被検軸1を回転させるモータ9と、このモータ9の回転角を制御するモータコントローラ14と、このモータ9の回転角を検出するエンコーダ10とを用いて、モータ9により実際に回転させた被検軸1の回転角と第1および第2の回転角検出部3,7により求めた被検軸1の算出回転角との差を補正角として不揮発性メモリ11に記憶し、この補正角でもって被検軸1の算出回転角を補正するようにしたものである。
(もっと読む)
21 - 40 / 48
[ Back to top ]